
2024年のサーボモーター・メーカー&ブランド・トップ10
目まぐるしく変化する産業オートメーションの世界において、サーボモーターは精度と効率を高める縁の下の力持ちです。しかし、数え切れないほどのメーカーがしのぎを削る中、どのサーボモーターが優れているのか、どのように判断すればよいのでしょうか。
機械はどのようにして最適なモーターを選択するのだろう?この記事では、さまざまな機械的作業に適したサーボモーターを選ぶための魅力的なプロセスを紹介します。機械の効率と精度を確保するために、エンジニアがどのような計算や基準を用いているのか、ぜひご覧ください。

与えられた:
サーボモータと減速機、部品回路図は以下の通りです:
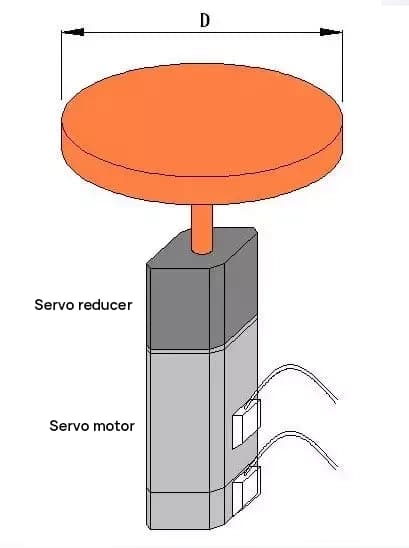
ディスク回転の慣性モーメントの計算
JL = MD2/8 = 50 * 502 / 8 = 15625 [kg-cm2]
減速比を1:Rとすると、サーボモーターシャフトに反映される負荷イナーシャは15625/Rとなる。2.
負荷イナーシャはローターイナーシャJの3倍以下であるべきという原則によればM モーターの
400Wモーターを選択した場合、JM = 0.277 [kg-cm2],
それから15625 / R2 < 3*0.277, R2 > 18803, R > 137,
出力回転数=3000/137=22[rpm]、
これは要件を満たしていない。
500Wモーターを選択した場合、JM = 8.17 [kg-cm2],
それから15625 / R2 < 3*8.17, R2 > 637, R > 25,
出力回転数=2000/25=80[rpm]、
という条件を満たしている。
このタイプのトランスミッションは抵抗が最小なので、トルク計算は無視される。
与えられた:
ベルトコンベアの各ホイールの重量は無視する、
このような負荷を駆動するモーターに必要な最小電力は?
コンポーネントの概略図は以下の通り:
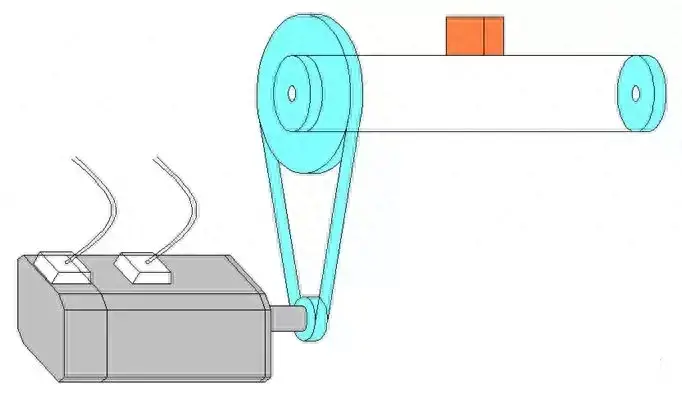
1.モータ軸に反映される負荷慣性を計算する:
JL = M * D2 / 4 / R12
= 50 * 144 / 4 / 100
= 18 [kg-cm2]
負荷イナーシャはモータ・ロータ・イナーシャ(JM)の3倍以下であるべきという原則に従っている:
JM > 6 [kg-cm2]
2.モーター負荷を駆動するのに必要なトルクの計算:
摩擦に打ち勝つために必要なトルク:
Tf = M * g * μ * (D / 2) / R2 / R1
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10
= 0.882 [N-m]
加速に必要なトルク:
Ta = M * a * (D / 2) / R2 / R1
= 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10
= 0.375 [N-m]
サーボモーターの定格トルクは、Tf最大トルクはTf + Ta.
3.必要なモーター速度の計算:
N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10
= 796 [rpm]
与えられた:
負荷条件に見合った最小出力のサーボモータをお選びください、
コンポーネント図は以下の通り:

1.モータ軸に換算した負荷イナーシャの計算
モーター軸に変換された重りの負荷イナーシャ
JW = M * (PB / 2π)².
= 200 * (2 / 6.28)²
=20.29[kg・cm²]。
スクリューの回転慣性
JB = MB * DB² / 8
= 40 * 25 / 8
= 125 [kg-cm²]
全負荷イナーシャ
JL=JW+JB=145.29[kg・cm²]である。
2.モーター速度の計算
必要モーター回転数
N = V / PB
= 30 / 0.02
= 1500 [rpm]
3.モーター負荷を駆動するのに必要なトルクの計算
摩擦に打ち勝つために必要なトルク
Tf = M * g * μ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9
= 1.387 [N-m]
加速時に必要なトルク
TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9
= 1.769 [N-m]
ねじが加速しているときに必要なトルク
TA2 = JB * α / η
= JB * N * 2π / 60 / t1)/ η
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9
= 10.903 [N-m]
加速に必要な総トルク
TA = TA1 + TA2 = 12.672 [N-m]
4.サーボモータの選択
サーボモーターの定格トルク
T > Tf かつT > Trms
サーボモーターの最大トルク
Tマックス > Tf + TA
最終的にECMA-E31820ESモーターが選ばれた。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。







