
2024年のサーボモーター・メーカー&ブランド・トップ10
目まぐるしく変化する産業オートメーションの世界において、サーボモーターは精度と効率を高める縁の下の力持ちです。しかし、数え切れないほどのメーカーがしのぎを削る中、どのサーボモーターが優れているのか、どのように判断すればよいのでしょうか。
サーボモーターとステッピングモーターは何が違うのか。この記事では、サーボモーターとステッピングモーターの基本的な違い、利点、具体的な用途について説明します。この記事を読むことで、それぞれの制御メカニズム、性能特性、理想的な使用シナリオを理解することができ、エンジニアリング・プロジェクトにおいて十分な情報に基づいた意思決定を行うことができます。各モータが様々な用途でどのように精度と効率を向上させるかを理解しましょう。


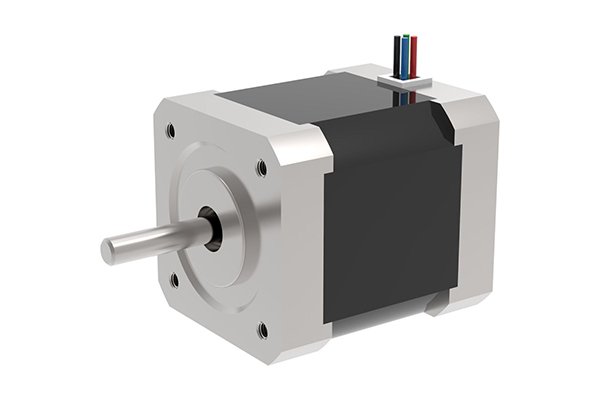
ステッピングモーター モーターの種類 制御用に特別に設計され、電気パルスを角度変位に変換する。
ステッパ・ドライバがパルス信号を受信すると、ステッパ・モータを「ステップ角」と呼ばれる所定の一定角度で、指定された方向に回転させる。
モーターは一定のステップ角でステップ・バイ・ステップに回転する。
パルス数を制御することで正確な位置決めができ、パルス周波数を制御することでモーターの回転速度や加速度を調整できる。
モーターの回転方向を反転させるには、巻線に通電する順序を変更します。

ステッピング・モーターの動作には、専用のステッピング・モーター・ドライバーが必要です。このドライバは、インパルス・コントロール・ユニット、パワー・ドライブ・ユニット、保護ユニットから構成されています。
パワー・ドライブ・ユニットは、インパルス制御ユニットによって生成されたパルスを増幅し、ステッピング・モーターに直接接続され、ステッピング・モーターとマイクロコントローラー間のパワー・インターフェースとして機能します。
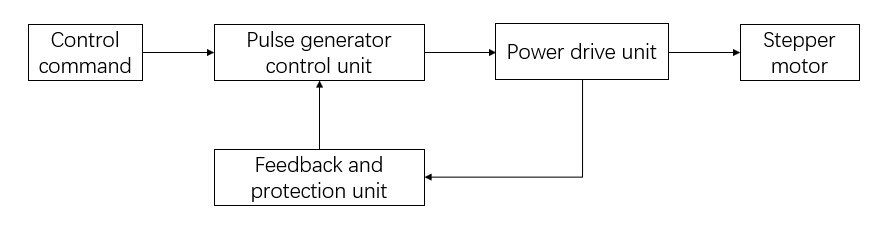
制御指示ユニットは、パルス信号と方向信号を受信し、対応するパルスセットを生成し、このパルスセットは、動力駆動ユニットを介してステッピングモータに送信される。
その後、ステッピングモーターが指示された方向に設定されたステップ角で回転する。
ステッピングモーターには、最大静止トルクなど、いくつかの重要な技術仕様がある、 開始周波数および動作周波数。
一般に、ステップ角が小さいほど最大静トルクが大きくなり、始動周波数と動作周波数が高くなる。
そのため、運転モードでは細分化された駆動技術が重視される。
この方法は、ステッピングモーターのトルクと分解能を向上させ、低周波発振を完全に除去する。
その結果、細分化されたドライブの性能は他のタイプのドライブよりも優れている。
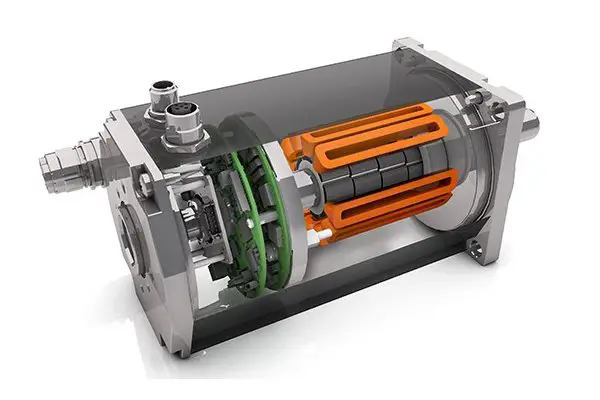
サーボモーター内部のローターは永久磁石である。ドライバはU/V/W三相の電気を制御して電磁界を作り、この磁界の影響を受けてロータを回転させる。モーターに内蔵されたエンコーダーからドライバーにフィードバック信号が送られ、ドライバーはフィードバック値と目標値に基づいてローターの回転角度を調整する。
サーボモータは、エグゼクティブモータとも呼ばれ、自動制御システムのアクチュエータとして使用され、受信した電気信号をモータシャフトの角変位または角速度に変換する。
サーボモーターには2種類ある:DCとACです。
サーボモーターはパルスを受け取ると、対応する角度を回転させて変位を発生させる。これは、サーボモーター自体がパルスを発するためで、各回転角度に対応する数のパルスが発せられ、サーボモーターが受信したパルスと閉ループを形成する。
これにより、システムはサーボモーターに送るパルス数と受け取るパルス数をモニターすることができ、正確な制御と正確な位置決めが可能になる。
性能面では、ACサーボモータはDCサーボモータより優れている。ACサーボモーターは正弦波制御を採用しているため、トルクリップルが小さく、高容量です。
一方、DCサーボモーターは台形波制御を採用しており、性能は比較的低い。
しかし、DCサーボモーターのブラシレスサーボモーターは、ブラシサーボモーターよりも性能が良い。
サーボモーターの内部には永久磁石のローターが入っている。
アクチュエーターは、U/V/Wの三相電力を制御して電磁界を発生させ、ローターを回転させる。
さらに、モーターのエンコーダーはドライバーにフィードバック信号を提供する。
ドライバは、フィードバック値と所望の目標値に基づいてロータの回転角を調整する。
ブラシ付きDCサーボモーター駆動:
モーターの動作原理は、標準的なDCモーターと同様である。
アクチュエーターは、電流ループ、速度ループ、位置ループの3ループ構造で、内側から順に配置されている。
電流ループの出力はモーターの電機子電圧を制御します。
電流ループの入力が速度ループの PID 出力、速度ループの入力が位置ループの PID 出力、位置ループの入力が指定入力となります。
コントロールダイアグラムは上図の通り。
ブラシレスDCサーボモーター駆動:
電源は直流で、内部の三相インバーターによってU/V/Wの交流電力に変換される。
このドライバも3ループ制御(電流ループ、速度ループ、位置ループ)を採用しており、その駆動制御原理は前述のものと同じである。
ACサーボモーター駆動:
システムは、パワーパネルとコントロールパネルという2つの独立したモジュールに分けることができ、それぞれが異なる機能を持つ。
制御盤は、対応するアルゴリズムを通じてPWM信号を出力し、駆動信号の駆動回路として機能し、インバータの出力電力を変更し、三相永久磁石同期ACサーボモータの制御を実現する。
パワー・ドライブ・ユニットは、まず、入力された三相電力または市電力を三相フルブリッジ整流回路を通して直流電力に変換する。
三相永久磁石同期ACサーボモーターは、三相正弦波PWM電圧型インバーターの整流子によって駆動される。
このプロセスは単にAC-DC-AC変換である。
コントロールユニットは、ACサーボシステム全体の中核であり、システムの位置制御、速度制御、トルク制御、電流制御を行う。
制御精度
ステッピングモーターは、位相とビートが多いほど精度が高くなる。
サーボモーターは自身のエンコーダーからフィードバックを得ており、エンコーダーの目盛りが大きいほど精度が高くなる。
低周波特性
ステッピングモーターは、低速で低周波振動を起こしやすい。
これに対抗するため、低速走行ではダンピング技術やサブディビジョン技術が採用されることが多い。
これに対し、サーボモーターは低速でも振動がなくスムーズに動く。
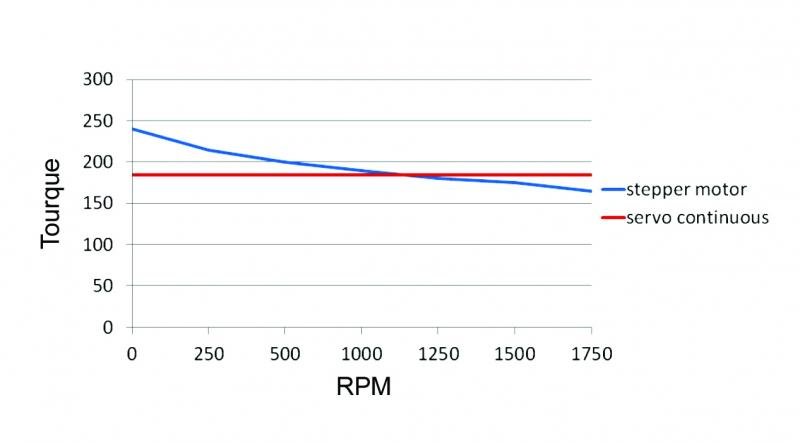
トルク周波数特性
ステッピングモーターの出力トルクは、速度の上昇とともに減少し、高速では大きく低下する。
対照的に、サーボモーターは定格速度で一定のトルクを出力し、定格速度で一定の電力を出力する。
過負荷容量
ステッピングモーターは過負荷容量に乏しいが、サーボモーターは強い過負荷容量を持っている。
運営実績
ステッピングモーターはオープンループ制御で動作するため、始動周波数が高すぎたり、負荷が重すぎたりすると、ステップを失ったり、回転が停止したりしやすい。また、回転数が高すぎるとオーバーシュートすることもあります。
一方、ACサーボドライブシステムはクローズドループ制御を採用している。サーボモータのドライバがモータエンコーダのフィードバック信号を直接サンプリングし、内部で位置と速度の制御ループを形成します。その結果、ステッピングモーターは、ステップロスやオーバーシュートが起こりにくくなり、制御性能の信頼性が高まります。
スピード・レスポンス
ステッピングモーターは、静止状態から動作速度まで加速するのに数百ミリ秒かかる。
それに比べ、ACサーボシステムは加速性能に優れ、通常数ミリ秒しかかからないため、素早い始動と停止を必要とする用途に適している。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。







