効率的な金属溶接:粉末溶融プールTIGテクニック
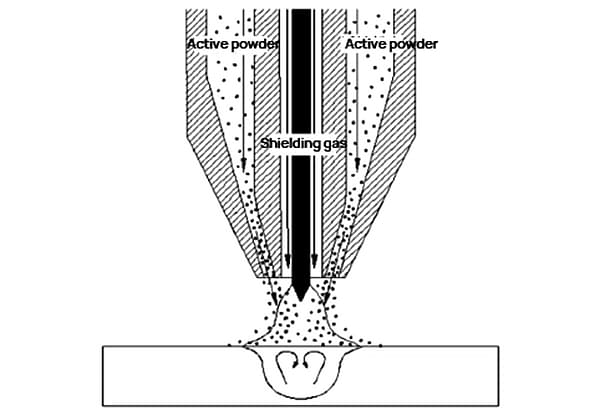
斬新な溶接方法を用いて、溶接の溶け込みと効率を劇的に向上させることができるとしたらどうだろう?この記事では、MnCl2を導入する技術、粉末溶融プール結合アクティブTIG溶接を紹介する。
安川電機の溶接ロボットは、溶接作業中のプール温度がさまざまな要因に左右される。技術者がこれらのロボットを正しく操作するには、ワイヤ角度、溶接時間、ワイヤ径、溶接プロセスなどの要素が含まれる。そのため、プール温度が過度であることが判明した場合、技術者はいくつかの側面に注目しながら冷却する必要があります。安川ロボットによる溶接生産工程では、溶接ワイヤと溶接位置の角度が90度の場合、アークが集中してプール温度が高くなる。逆に角度が小さいとアークは分散し、プール温度は低くなる。例えば、[...]の最下層を溶接しているとき。

安川電機の溶接ロボットは、溶接作業中のプール温度がさまざまな要因に左右される。
技術者がこれらのロボットを正しく操作するには、ワイヤ角度、溶接時間、ワイヤ直径、溶接プロセスなどの要素が含まれる。
したがって、プールの温度が高すぎると判断された場合、技術者はいくつかの点に着目して冷却する必要がある。
安川ロボットによる溶接生産工程では、溶接ワイヤと溶接位置の角度が90度になるとアークが集中し、プール温度が高くなる。
逆に、角度が小さいとアークが分散し、プールの温度が低くなる。
例えば、12mm平板溶接の下層を溶接する場合、プー ル温度を下げ、溶接痕や孔食の発生を防ぐため、ワイヤ角 度を60~70度以内に制御する必要がある。
さらに、アーク切断の頻度とアーク燃焼時間がプール温度に直接影響するため、システムのアーク燃焼時間を厳密に制御することが極めて重要である。
肉厚が薄く、アークの耐熱性が限られているため、プール温度を下げるためにアークの破断周波数を遅くすると、気孔が発生する可能性がある。
したがって、アーク の燃焼時間を利用してプール温度を制御し、過度 に高い溶接継ぎ目やパイプ内部の傷の形成を防 ぐ必要がある。
従来、安川電機の溶接ロボットの技術者は、溶接シームの空間位置や層に応じて溶接電流やワイヤ径を選択する必要があった。
溶接電流とワイヤ径は、溶接開始時には大きめのものを使用し、垂直位置と水平位置では小さめのものを使用する。
この方法によってのみ、プールの温度を容易にコントロールすることができ、その結果、プールの温度上昇を抑えることができるのである。 溶接継ぎ目.
過去の経験から、安川溶接ロボットが円運動経路を使用する場合、プール直径の温度は三日月運動経路のそれよりも高く、三日月運動経路の温度はギザギザ運動経路のそれよりも高い。
したがって、できるだけギザギザの運動経路を使い、溝の両側で揺れの振幅と一時停止を行い、プール温度を効果的にコントロールすることが望ましい。

MachineMFGの創設者として、私は10年以上のキャリアを金属加工業界に捧げてきました。豊富な経験により、板金加工、機械加工、機械工学、金属用工作機械の分野の専門家になることができました。私は常にこれらのテーマについて考え、読み、執筆し、常にこの分野の最前線にいようと努力しています。私の知識と専門知識をあなたのビジネスの財産にしてください。