최적의 성능을 위한 프로급 서보 드라이버 설정 가이드
최고의 성능을 위해 서보 드라이버를 설정하는 방법이 궁금하신가요? 이 가이드는 위치 제어부터 속도 조절까지 게인 파라미터 조정에 대해 알아야 할 모든 것을 다룹니다....
간단한 캠과 팔로워 시스템으로 복잡한 기계에서 어떻게 효율적이고 정밀한 모션을 구현할 수 있을까요? 이 문서에서는 캠 구동 메커니즘 설계의 복잡성을 살펴보고 다양한 유형의 캠과 팔로워, 동작 경로, 최적의 성능을 달성하는 방법에 대해 설명합니다. 기본 구성 요소부터 고급 설계 방법까지, 독자들은 고효율 캠 시스템을 만드는 데 필요한 귀중한 통찰력을 얻을 수 있습니다. 엔지니어링 프로젝트에서 캠 메커니즘에 대한 이해와 응용력을 높일 수 있는 실용적인 팁과 상세한 분석을 배울 수 있습니다.
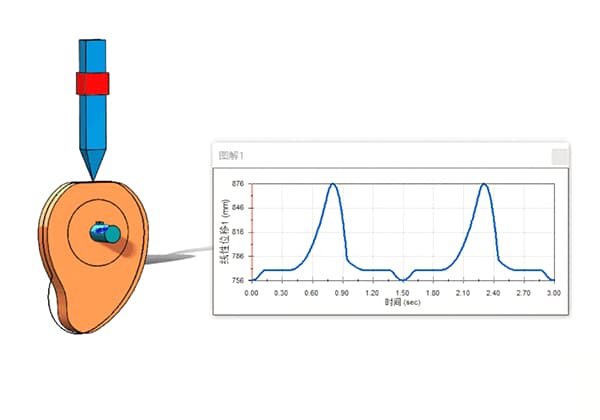
캠 메커니즘은 일반적으로 캠과 팔로워라는 두 개의 움직이는 부품으로 구성되며, 두 부품 모두 프레임에 고정되어 있습니다. 캠 장치는 매우 다재다능하며 거의 모든 임의의 동작을 생성할 수 있습니다.
캠은 곡면 또는 홈이 있는 구성 요소로 정의할 수 있습니다. 이를 흔들거나 회전하면 다른 컴포넌트인 팔로워가 미리 설정된 동작을 제공할 수 있습니다. 팔로워의 경로는 왕복 운동을 얻기 위해 대부분 슬롯으로 제한됩니다.
리턴 스트로크 중에는 자체 무게에 의존하는 경우도 있지만, 일부 메커니즘은 스프링을 리턴 힘으로 사용하여 정밀한 움직임을 구현합니다. 다른 메커니즘은 가이드 레일을 사용하여 특정 경로를 따라 이동합니다.
캠의 모양에 따라 디스크 캠, 무빙 캠, 원통형 캠의 세 가지 유형으로 나눌 수 있습니다.
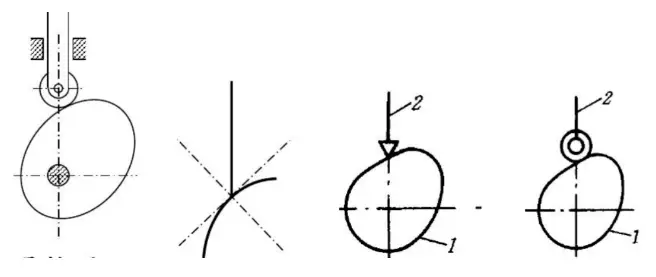
팔로워는 끝 부분에 따라 뾰족한 팔로워, 롤러 팔로워, 바닥이 평평한 팔로워의 세 가지 유형으로 나눌 수 있습니다.
날카로운 노즈 팔로워와 캠 사이의 점 접촉으로 인해 높은 응력과 빠른 마모가 발생하기 때문에 충격이 큰 저속 캠 메커니즘에는 적합하지 않습니다. 롤러 팔로워는 이러한 단점을 극복할 수 있습니다.
전송 효율을 높이기 위해 바닥면에 힘의 방향과 수직인 평평한 바닥의 팔로워를 도입할 수도 있습니다.
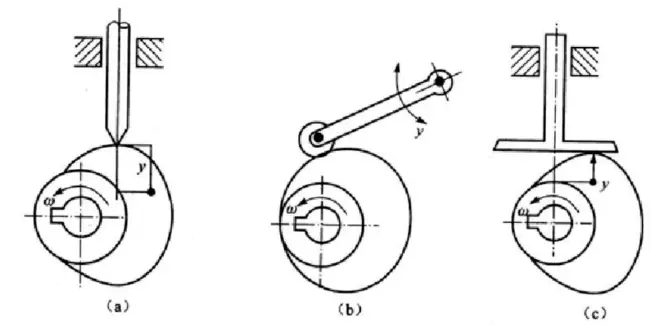
앞서 고려한 전송 구성 요소는 직선 운동의 형태이지만 진동 운동의 형태일 수도 있습니다. 전자를 직동형 팔로워라고 하고 후자를 스윙형 팔로워라고 합니다.
또한 캠 회전의 중심을 팔로워 모션의 선형 경로가 아닌 다른 곳으로 만들 수도 있습니다. 이때 이를 오프셋이라고 합니다. 반대로 회전 중심이 팔로워 모션의 선형 경로에 있으면 동심이라고 부를 수 있습니다.
또한 높은 스트레스 잠금 관계를 유지하고 메커니즘을 기하학적 잠금과 강제 잠금으로 나누는 방법도 고려할 수 있습니다.
캠 모양, 팔로워의 끝, 팔로워의 움직임 패턴을 조합하여 설계된 메커니즘의 이름을 결정할 수 있습니다(예: 날카로운 코의 직동 팔로워가 있는 디스크 캠(팔로워-캠 상대 위치 + 팔로워 끝 + 팔로워 움직임 패턴 + 캠 모양).
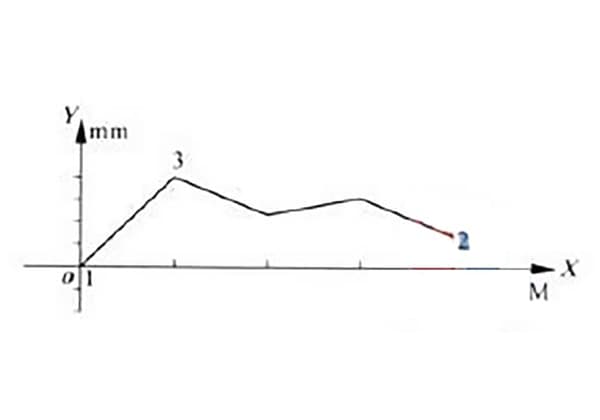
먼저 팔로워가 장착된 캠이 있습니다. 캠이 각속도 ω로 φs도 회전하면 팔로워는 움직이지 않습니다. 이때 φs를 체류 각도라고 하고, 이에 해당하는 원을 기준 원이라고 합니다. 마찬가지로 이 원의 반지름을 기본 원 반지름 r0이라고 합니다.
그런 다음 캠을 각속도 ω로 φ도씩 계속 회전시키면 팔로워가 h만큼 상승합니다. 이때 φ를 스트로크 각도, h를 스트로크라고 부릅니다.
나중에 팔로워가 포인트 h에 도달하면 일정 시간 동안 그대로 둡니다. 그 동안 캠은 리프트 각도에 해당하는 φs'만큼 회전합니다.
마지막으로 팔로워를 원래 위치로 되돌려야 하므로 캠을 φ' 만큼 회전합니다. 이때 팔로워는 시작 지점으로 돌아갑니다. 우리는 φ'를 복귀 각도라고 부릅니다.
캠 메커니즘을 설계하는 방법에는 크게 두 가지가 있는데, 하나는 그래픽 방식이고 다른 하나는 분석 방식입니다.
전자는 원하는 푸시 모션 다이어그램을 제공한 다음 다이어그램에서 제공하는 각도-프로세스 관계를 기반으로 해당 윤곽 곡선을 구하기만 하면 되는 비교적 간단한 방식입니다.
정확도는 그리 높지 않습니다. 후자는 계산되며 계산이 비교적 복잡하여 정밀도가 높은 캠 메커니즘을 설계하는 데 적합합니다.

MachineMFG의 창립자인 저는 10년 넘게 금속 가공 산업에 종사해 왔습니다. 폭넓은 경험을 통해 판금 제조, 기계 가공, 기계 공학 및 금속용 공작 기계 분야의 전문가가 될 수 있었습니다. 저는 이러한 주제에 대해 끊임없이 생각하고, 읽고, 글을 쓰면서 제 분야에서 선두를 유지하기 위해 끊임없이 노력하고 있습니다. 저의 지식과 전문성을 귀사의 비즈니스에 자산으로 활용하세요.