
선형 격자형 스케일 기본 사항: 알아야 할 모든 것
간단한 유리 표면으로 공작 기계의 정밀도를 끌어올린다고 상상해 보세요. 선형 격자 저울이 바로 그 역할을 수행하여 미세한 선을 매우 정확한 측정값으로 변환합니다. 이 기사에서는 어떻게 이러한...
엔지니어가 제조 과정에서 정밀도와 정확성을 어떻게 보장하는지 궁금한 적이 있나요? 이 블로그 게시물에서는 고품질 부품 생산을 가능하게 하는 기계공학의 중요한 측면인 기하학적 공차의 매력적인 세계에 대해 자세히 알아볼 것입니다. 노련한 전문가들의 전문 지식을 바탕으로 다양한 유형의 공차와 그 응용 분야를 살펴보고, 이 복잡한 주제에 대한 이해를 높이는 데 도움이 되는 귀중한 통찰력을 제공합니다. 기계 공학 분야에서 완벽함을 달성하는 비결을 발견할 준비를 하세요!
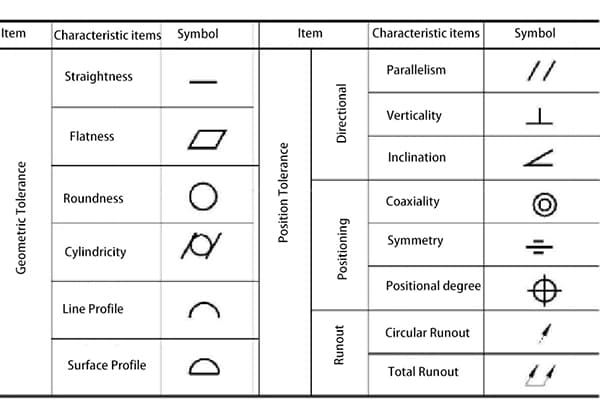
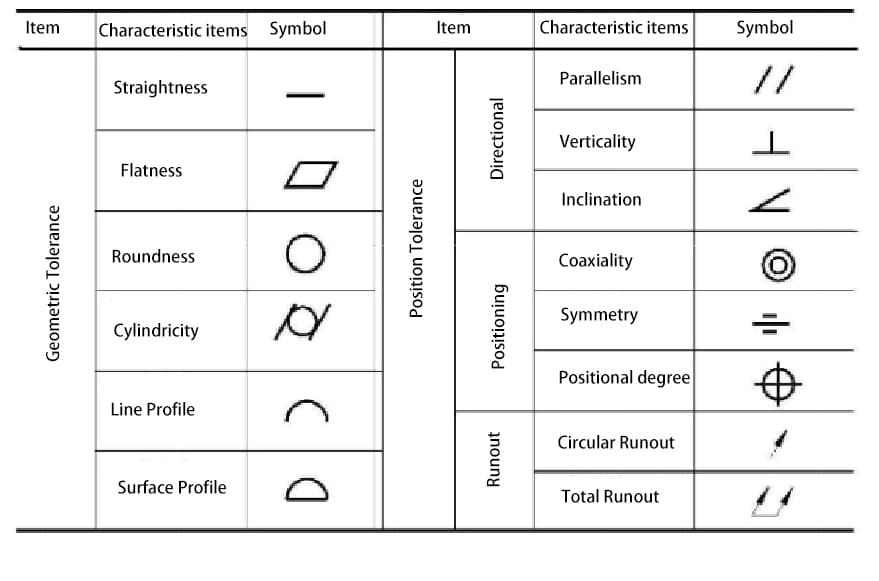
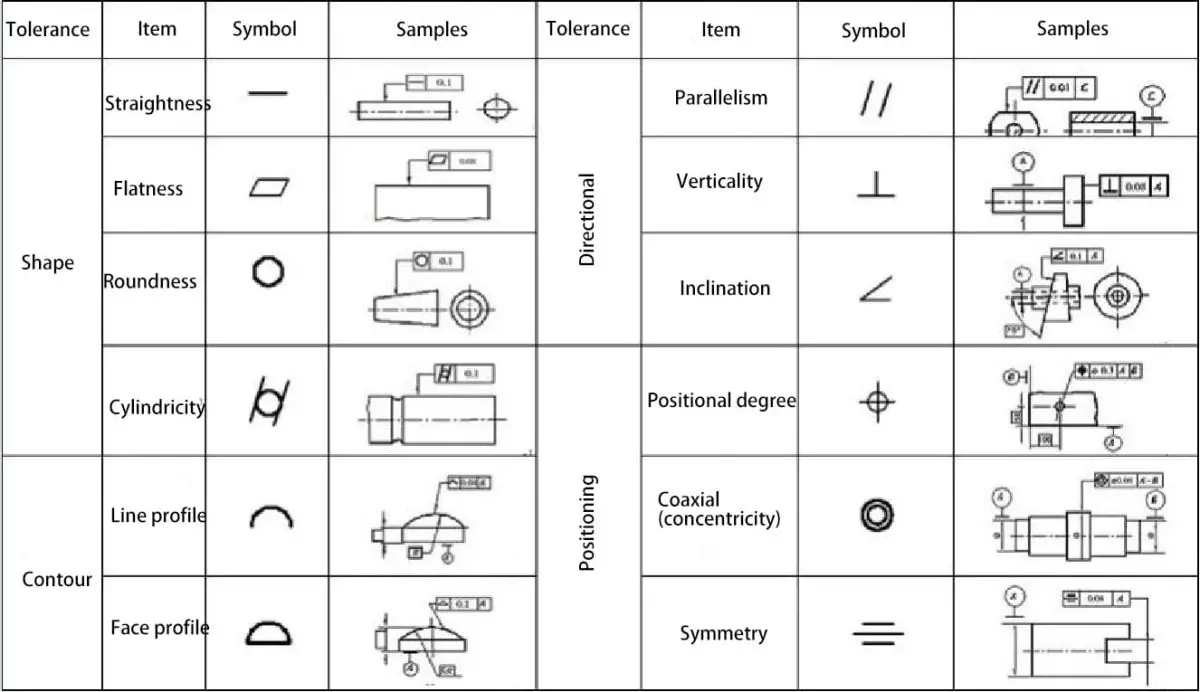
국가 표준에서 지정한 기하 공차는 기하 공차와 위치 공차, 총 14개 항목으로 나뉩니다.
그 이름과 기호는 아래 표에 나와 있습니다.
직진성 - 모든 점은 직선에 있으며, 허용 오차는 두 평행선 사이의 영역으로 지정됩니다.
평탄도 - 서페이스의 모든 점은 평면에 있으며, 허용 오차는 두 평행 평면 사이의 영역으로 지정됩니다.
원형 - 서페이스의 모든 점은 둘레에 있으며, 허용 오차는 두 동심원 사이의 영역으로 지정됩니다.
원통형 - 회전하는 표면의 모든 점의 축은 공통 축에서 등거리에 있습니다. 원통형 허용 오차는 두 개의 동심원 실린더로 형성된 허용 오차 영역을 정의하며, 이 회전 표면은 이 영역 내에 속해야 합니다.
프로필 허용 오차 - 불규칙한 표면, 선, 호 또는 일반 평면에 대한 허용 오차 방법을 정의합니다. 프로파일은 단일 선 요소 또는 부품의 전체 표면에 적용할 수 있습니다. 프로파일 허용 오차는 실제 프로파일을 따라 고유한 경계를 지정합니다.
수직성 - 서페이스 또는 축이 기준면 또는 축에 수직입니다. 수직 허용 오차는 기준면 또는 축에 수직인 두 평면으로 정의된 영역 또는 기준축에 수직인 두 평행 평면으로 정의된 영역 중 하나를 지정합니다.
병렬 처리 - 서페이스 또는 축과 모든 점은 기준면 또는 축에서 등거리에 있습니다. 병렬 처리 허용 오차 는 기준면 또는 축에 평행한 두 개의 평행 평면 또는 선으로 정의된 영역 또는 축이 기준축과 평행한 원통도 허용 오차 영역 중 하나를 지정합니다.
동축 - 회전 표면의 모든 교차하는 결합 가능한 요소의 축은 데이터 특징의 공통 축입니다. 동축 허용 오차는 축이 데이텀 축과 동일한 원통형 허용 오차 영역을 지정합니다.
위치 허용 오차 - 위치 허용 오차는 중심축 또는 중심면이 실제(이론적으로 올바른) 위치에서 벗어날 수 있는 영역을 정의합니다.
기본 치수는 데이터 특징과 상호 관련된 특징 사이의 실제 위치를 설정합니다. 위치 오차는 피처와 정확한 위치 사이의 총 허용 위치 편차입니다.
구멍 및 외경과 같은 원통형 피처의 경우 위치 공차는 일반적으로 피처의 축이 떨어져야 하는 공차 영역의 직경입니다. 비원형 피처(예: 슬롯 및 짧은 돌출부)의 경우 위치 공차는 피처의 중심면이 떨어져야 하는 공차 영역의 전체 너비입니다.
원형 런아웃 - 원형 표면 요소에 대한 제어 기능을 제공합니다. 부품이 360도 회전할 때 이 공차는 원형 요소의 모든 측정 위치에 독립적으로 적용되며 기준축을 중심으로 구성된 원형 런아웃 공차에 적용되어 누적된 진원도 및 동축성 변화를 제어합니다.
기준축을 기준으로 수직으로 구성된 서페이스에 적용하면 평면 서피스 피처의 원형 요소를 제어합니다.
총 런아웃 - 모든 표면 요소에 대한 복합적인 제어 기능을 제공합니다. 부품이 360도 회전할 때 이 허용 오차는 원형 및 길쭉한 피처 모두에 동시에 적용됩니다. 데이텀 축을 중심으로 구성된 서페이스에 적용할 경우 총 런아웃은 진원도, 원통도의 누적된 가변성을 제어합니다, 직진성, 동축성, 각도, 테이퍼 및 프로파일을 제어합니다. 데이텀 축을 기준으로 수직으로 구성된 서페이스에 적용하면 다음과 같은 누적된 가변성을 제어합니다. 수직도 그리고 직진성.
피처 - 컴포넌트의 지오메트리를 구성하는 점, 선 및 표면을 나타냅니다.
이상적인 피처 - 기하학적 의미를 가진 피처입니다.
실제 피처 - 컴포넌트에 실제로 존재하는 피처로, 일반적으로 측정된 피처로 표현됩니다.
참조 피처 - 측정된 피처의 방향이나 위치를 결정하는 데 사용되는 피처입니다. 간단히 참조라고도 하며, 특징 간의 기하학적 관계를 결정하기 위한 기초 역할을 합니다. 여기에는 기준점, 기준선 및 기준 표면이 포함됩니다.
측정된 피처 - 모양 또는 위치 허용 오차를 지정하는 피처입니다.
중심 피처 - 피처와 대칭 관계를 갖는 점, 선 또는 표면입니다.
허용 오차 범위 - 실제 모양 또는 위치 특징의 변화를 제한합니다. 크기, 모양, 방향 및 위치에 따라 결정되는 주어진 최대 오차 값으로 정의되는 영역입니다."

허용 오차 범위는 허용 오차 값 t의 거리에서 두 개의 평행선/평면/원통 등 사이의 영역입니다.
예제 1
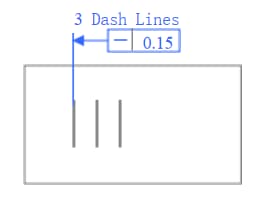
각인된 각 선은 표면의 두 평행선 사이에 공차 값 0.015mm로 위치해야 합니다.

예 2

원통형 표면의 모든 요소 선은 축면과 두 평행선 사이에 허용 오차 값 0.02mm의 거리로 위치해야 합니다.
적용 사례

예제 3

원통형 표면의 모든 요소 선은 축면과 두 평행선 사이에 100mm 이내의 허용 오차 값 0.04mm로 위치해야 합니다.
예 4
토론: 동일한 표면에서 두 방향에 서로 다른 직진도 공차가 주어지면 어떻게 이해해야 할까요?


허용 오차 범위는 허용 오차 값 t의 거리에서 두 평행면 사이의 영역입니다.
이상적인 평면 상태를 유지하는 컴포넌트의 평면 피처의 실제 모양을 나타냅니다.
예제 1
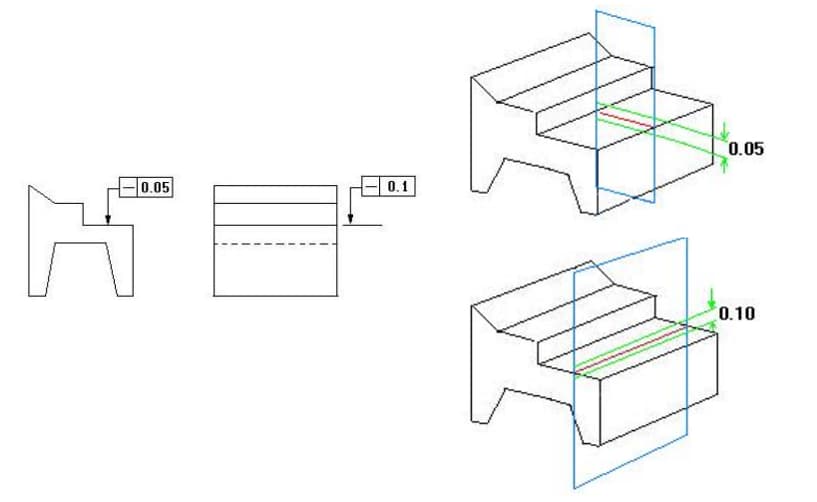
상단 표면은 0.1mm의 허용 오차 값에서 두 개의 평행 평면 내에 위치해야 합니다.

예 2

표면의 100×100 범위는 0.1mm의 허용 오차 값으로 두 개의 평행 평면 내에 위치해야 합니다.
컴포넌트의 원형 피처의 실제 모양과 그 중심이 동일한 거리를 유지하는 것을 나타냅니다.
허용 오차 범위는 동일한 단면에서 허용 오차 값 t의 반지름 차이가 있는 두 동심원 사이의 영역입니다.
예제 1
축에 수직인 모든 단면에서 원은 허용 오차 값 0.02mm의 반경을 가진 두 동심원 사이에 위치해야 합니다.

예 2
축에 수직인 모든 단면에서 원은 허용 오차 값 0.02mm의 반경을 가진 두 동심원 사이에 위치해야 합니다.

컴포넌트의 원통형 표면 윤곽에 있는 모든 점이 축으로부터 동일한 거리를 유지하는 상태를 나타냅니다.
허용 오차 범위는 동일한 축에서 허용 오차 값 t의 반경 차이가 있는 두 원통형 표면 사이의 영역입니다.
예제 1
원통형 표면은 동일한 축에서 공차 값의 반경 차이가 0.05mm인 두 원통형 표면 사이에 위치해야 합니다.

컴포넌트의 실제 측정된 피처가 기준과 동일한 거리를 유지하는 상태를 나타냅니다.
허용 오차 범위는 한 방향이 주어진 경우 허용 오차 값 t의 거리에서 기준면(또는 선, 축)과 평행한 두 평행면 사이의 영역이며, 두 방향이 주어진 경우 허용 오차 값 t1×t2의 치수와 기준 축에 평행한 직사각형 프리즘 내의 영역입니다.
예제 1
상단 표면은 공차 값 0.05mm의 거리에서 기준면과 평행한 두 개의 평행면 사이에 위치해야 합니다.

예 2
ΦD의 축은 공차 값 0.1mm의 거리에서 기준축 Φ와 수직으로 평행한 두 평행면 사이에 위치해야 합니다.

공차는 부품의 실제 피처가 기준 피처에 대해 정확한 90도 각도로 유지되는 상태를 나타냅니다.
방향이 지정된 경우 허용 오차 영역은 기준 평면(또는 선, 축)에 수직이고 허용 오차 값 t와 같은 거리로 분리된 두 평행 평면(또는 선) 사이의 영역입니다.
두 방향이 서로 수직인 경우 허용 오차 영역은 기준 축에 수직인 치수가 t1 × t2인 평행 육면체 내부의 영역입니다.
예제 1
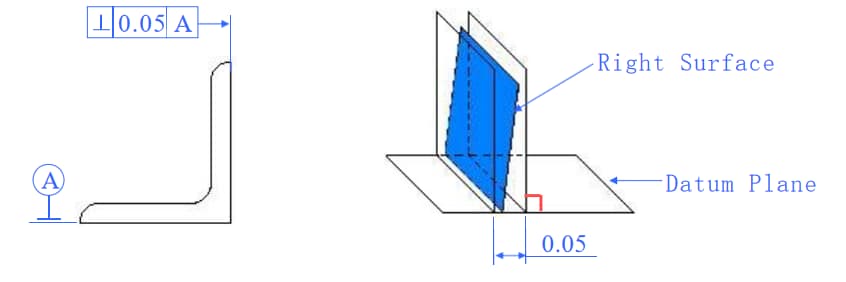
오른쪽 표면은 기준면에 수직이고 편차가 0.05mm인 두 개의 평행면 사이에 위치해야 합니다.
예 2
왼쪽 표면은 0.05mm의 편차 범위 내에 있어야 하며 기준 축에 수직인 두 개의 평행면 사이에 있어야 합니다.

예제 3
실린더 d의 축은 직경 공차가 0.05mm인 기준 평면에 수직인 실린더 표면 내에 위치해야 합니다.

예 4
원형 구멍 E의 축은 기준면 Z에 수직인 두 평행면 사이에 있어야 하며, 편차 값은 0.06mm여야 합니다.



부품의 두 요소가 상대 방향 사이에서 주어진 각도를 유지하면서 올바른 상태를 유지합니다.
지정된 방향 내에서 공차 영역은 기준면(또는 선 또는 축)과 이론적으로 올바른 각도에 있고 공차 값 t의 거리에 있는 두 평행 평면(또는 선) 사이의 영역입니다.
예제 1
경사면은 기준면과 45도 각도를 이루는 두 개의 평행면 사이에 위치해야 하며 공차 영역 내에서 0.08mm의 거리를 유지해야 합니다.

예 2
특징 D의 축은 기준축과 45도 각도를 이루는 두 평행 평면 사이에 위치해야 하며 공차 영역 내에서 기준축으로부터 0.1mm 떨어진 곳에 있어야 합니다.

동심도는 부품에서 측정 중인 축이 동일한 직선을 따라 기준축과 정렬을 유지하는 상태입니다.
공차 영역은 공차 값 t의 직경을 가지며 기준축과 동축인 원통 내 영역입니다.
예제 1
특징점 D의 축은 직경이 0.1mm이고 공차 영역 내에서 기준축 D와 동축인 원통 내에 위치해야 합니다.

대칭은 부품의 두 쌍의 대칭 피처가 동일한 평면 내에 정렬되어 있는 상태를 말합니다.
공차 영역은 기준면(또는 중심선 또는 축)에서 공차 값 t의 거리에 있고 기준면에 대해 대칭으로 배열된 두 개의 평행 평면(또는 선) 사이의 영역입니다.
서로 수직인 두 방향이 지정된 경우 허용 오차 영역은 단면이 허용 오차 값 t1 x t2와 같은 4면 프리즘 내의 영역입니다.
예제 1
슬롯의 중심면은 데이텀 중심면에 대해 대칭으로 배열된 두 개의 평행면 사이에 위치해야 하며 공차 영역 내에서 0.1mm의 거리에 있어야 합니다.

예시:

(1) 단말기의 중앙을 곧게 펴야 합니다.
(2) 슬롯 중앙에서 한 쪽의 최대 편차는 0.035mm를 초과할 수 없습니다.
질문이 있으신가요?

(1) 오프셋 T는 어떻게 계산되나요?
T=(b-a)/2
(2) 대칭 허용 오차는 무엇인가요?
위치 허용 오차는 부품의 점, 선, 표면 및 기타 요소의 이상적인 위치와 관련된 정확도를 나타냅니다.
허용 오차 영역:
(1) 점의 위치 허용 오차: 허용 오차 영역은 점의 이상적인 위치를 중심으로 허용 오차 값 t의 지름을 가진 원 또는 구 내의 영역입니다.
(2) 선의 위치 허용 오차: 방향이 주어지면 공차 영역은 선의 이상적인 위치를 중심으로 대칭으로 배열된 두 개의 평행 평면(또는 선)과 공차 값 t의 거리 사이의 영역입니다. 두 개의 수직 방향이 주어지면 공차 영역은 단면 크기가 t1 X t2인 4면 프리즘과 선의 이상적인 위치와 일치하는 프리즘의 축선 내의 영역입니다.
(3) 표면의 위치 허용 오차: 허용 오차 영역은 표면의 이상적인 위치를 중심으로 대칭으로 배열된 두 평행면 사이의 영역으로, 허용 오차 값 t의 거리입니다.
예제 1
포인트는 공차 값 0.3mm의 지름을 가진 원 안에 위치해야 하며 원의 중심은 상대 데이텀 A와 B에 의해 결정된 포인트의 이상적인 위치에 있어야 합니다.

세 가지 기준면 시스템:
상호 수직인 세 개의 기준면 A, B, C는 일반적으로 세 개의 기준면 시스템으로 알려진 기준면 시스템을 구성합니다. 이는 부품의 다양한 요소의 기하학적 관계를 결정하기 위한 출발점입니다.
세 개의 기준면 시스템에서 기준면은 기능에 따라 정렬됩니다.
가장 중요한 것은 첫 번째 데이텀 평면(A)이며, 두 번째(B) 및 세 번째(C) 데이텀 평면이 그 뒤를 따릅니다.
예 2
구멍의 축은 공차 값이 0.1mm인 실린더 표면 내에 위치해야 하며 실린더 표면의 축선은 상대 데이텀 A, B 및 C의 점의 이상적인 위치와 일치해야 합니다.

예제 3
복합 위치 허용 오차.
기하학적 프레임:
이상적인 축선 집합 또는 축선과 기준점 사이의 올바른 기하학적 관계를 보여주는 그래픽입니다.

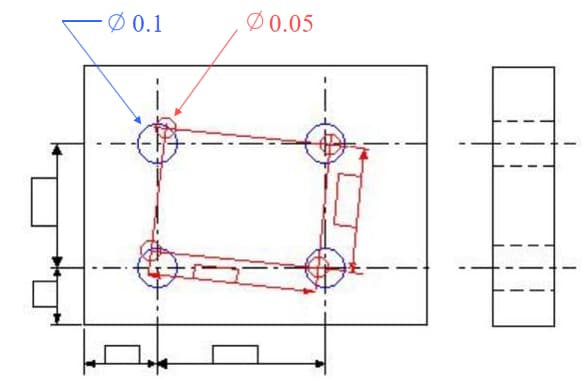
4개의 D 홀의 축은 직경 공차 값이 0.1mm인 두 개의 원통형 공차 영역의 겹치는 부분 내에 위치해야 하며, 하나는 직경 공차 값이 0.05mm이고 다른 하나는 직경 공차 값이 0.1mm인 영역입니다. 4개의 0.1mm 위치 공차 영역의 기하학적 프레임은 기준점 A, B 및 C를 기준으로 결정되며, 4개의 0.05mm 위치 공차 영역의 기하학적 프레임은 기준점 A를 기준으로만 방향을 지정합니다.
4개의 D 홀의 축은 직경 공차 값이 0.1mm인 두 개의 원통형 공차 영역의 겹치는 부분 내에 위치해야 하며, 하나는 직경 공차 값이 0.05mm이고 다른 하나는 직경 공차 값이 0.1mm인 영역입니다. 4개의 0.1mm 위치 공차 영역의 기하학적 프레임은 기준점 A, B 및 C를 기준으로 결정되며, 4개의 0.05mm 위치 공차 영역의 기하학적 프레임은 기준점 A를 기준으로만 방향을 지정합니다.
고려 사항: 다음 두 가지 유형의 위치 정확도를 비교합니다.

부품의 회전 표면이 측정 표면 내에서 제한되고 기준 축을 기준으로 지정된 위치를 유지하는 상태를 말합니다.
(1) 방사형 런아웃.
허용 오차 영역은 기준 축을 중심으로 하는 두 개의 동심원 사이의 영역으로, 기준 축에 수직인 측정 평면의 반경 차이가 허용 오차 값 t입니다.
(2) 끝면 런아웃.
공차 영역은 기준 축과 동축인 임의의 직경 위치에서 측정 실린더의 폭이 t인 생성자 방향을 따른 원통형 표면적입니다.
예제 1
방사형 런아웃.
원통형 표면이 축 방향 이동 없이 기준축을 중심으로 회전할 때 측정 평면의 방사형 런아웃은 허용 오차 값인 0.05mm를 초과하지 않아야 합니다.

허용 오차 영역은 기준 축을 중심으로 하는 두 개의 동심원 사이의 영역으로, 기준 축에 수직인 측정 평면의 반경 차이가 허용 오차 값 t입니다.
예 2
끝면 런아웃.
부품이 축 방향 이동 없이 기준 축을 중심으로 회전할 때 왼쪽 끝면의 측정 직경에서 축 방향 런아웃은 공차 값 0.05mm를 초과하지 않아야 합니다.

공차 영역은 기준 축과 동축인 임의의 직경 위치에서 측정 실린더의 폭이 t인 생성자 방향을 따른 원통형 표면적입니다.
기준 축을 중심으로 연속적으로 회전할 때 부품의 전체 측정 표면을 따라 균일한 런아웃을 나타냅니다.
(1) 방사형 총 런아웃.
공차 영역은 기준 축과 동축이고 공차 값 t의 반경 차이가 있는 두 실린더 사이의 영역입니다.
(2) 끝면 총 런아웃.
허용 오차 영역은 기준 축에 수직이고 허용 오차 값 t의 거리를 갖는 두 평행면 사이의 영역입니다.
예제 1
방사형 총 런아웃.
표면이 축 방향 이동 없이 기준 축을 중심으로 연속적으로 회전하고 인디케이터가 기준 축과 평행하게 선형으로 이동할 때 전체 표면의 런아웃은 허용 오차 값인 0.02mm를 초과하지 않아야 합니다.

공차 영역은 기준 축과 동축이고 공차 값 t의 반경 차이가 있는 두 실린더 사이의 영역입니다.
예 2
엔드 페이스 총 런아웃.
끝면이 축 방향 이동 없이 기준 축을 중심으로 연속적으로 회전하고 인디케이터가 기준 축에 수직으로 선형 이동하는 경우, 전체 끝면의 런아웃은 공차 값인 0.05mm를 초과하지 않아야 합니다.

허용 오차 영역은 기준 축에 수직이고 허용 오차 값 t의 거리를 갖는 두 평행면 사이의 영역입니다.

MachineMFG의 창립자인 저는 10년 넘게 금속 가공 산업에 종사해 왔습니다. 폭넓은 경험을 통해 판금 제조, 기계 가공, 기계 공학 및 금속용 공작 기계 분야의 전문가가 될 수 있었습니다. 저는 이러한 주제에 대해 끊임없이 생각하고, 읽고, 글을 쓰면서 제 분야에서 선두를 유지하기 위해 끊임없이 노력하고 있습니다. 저의 지식과 전문성을 귀사의 비즈니스에 자산으로 활용하세요.







