De coördinatenmeetmachine (CMM) is een precisiemeetinstrument dat in diverse industrieën wordt gebruikt. Hij is uitgerust met luchtremschakelaars en microbewegingen op de drie assen, zodat elke as nauwkeurig kan worden overgebracht. Bovendien is de CMM uitgerust met een krachtig data-acquisitiesysteem om de nauwkeurigheid van de metingen te garanderen.
De CMM wordt vaak gebruikt voor productontwerp, vormapparatuur, tandwiel- en bladmetingen, machinefabricage, opspanmiddelen voor gereedschappen, stoomvormonderdelen, elektronische en elektrische apparatuur en andere precisiemetingen.
1. Instrument introductie
De driecoördinatenmeetmachine (CMM), ook bekend als het driecoördinatenmeetinstrument, is een precisiemeettoestel dat gebruikt wordt om geometrische afmetingen, vormen en ruimtelijke relaties binnen een driedimensionaal coördinatensysteem te meten. Het werkt met een taster die langs drie orthogonale assen (X, Y en Z) kan bewegen met hoge precisie.
De taster kan fysiek contact maken met het werkstuk (schakelende of scannende tasters) of contactloze metingen uitvoeren (laser- of visionsystemen). Het verplaatsingsmeetsysteem voor elke as, dat meestal gebruikmaakt van zeer nauwkeurige lineaire encoders of optische schalen, voert de gegevens door naar een geavanceerd computersysteem. Dit systeem verwerkt de verzamelde punten (x, y, z) om verschillende geometrische kenmerken, afmetingen en vormkenmerken van het werkstuk te berekenen.
CMM's kunnen meerdere aspecten van de productkwaliteit meten, waaronder:
- Nauwkeurigheid van afmetingen: Lineaire en hoekmetingen
- Nauwkeurigheid positionering: ruimtelijke relaties tussen kenmerken
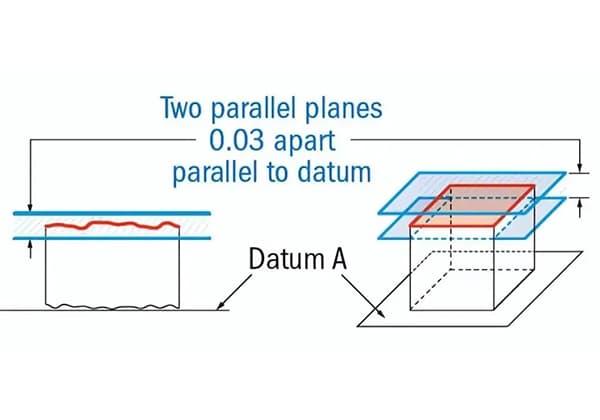
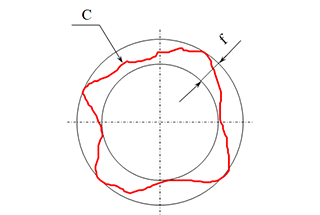
- Geometrische nauwkeurigheid: Toleranties op vorm en oriëntatie (vlakheid, cilindriciteit, enz.)
- Contournauwkeurigheid: Complexe oppervlakteprofielen en vrije vormen
Dit veelzijdige instrument is cruciaal om precisie en nauwkeurigheid te garanderen in diverse industrieën, waaronder de auto-industrie, ruimtevaart en geavanceerde productie.
Modelspecificaties:
Structuur: Drie-assige granieten constructie met een bewegend brugontwerp in Duitse stijl, met vierzijdige behuizing voor verbeterde stabiliteit.
Aandrijfsysteem: DC servomotoren gekoppeld aan voorgespannen hoge-precisie luchtlagers voor een soepele, wrijvingsloze beweging.
Meetsysteem: RENISHAW open lineaire encoders met een resolutie van 0,1 μm (100 nm).
Tastersysteem: Renishaw besturing en tasterkop, voor compatibiliteit en hoogwaardige meetmogelijkheden.
Basis: Granieten oppervlakteplaat met hoge precisie (graad 00) voor een stabiel referentieoppervlak.
Milieuvereisten:
- Temperatuur: 20°C ± 2°C
- Vochtigheid: 40% - 70% RH
- Temperatuurgradiënt: ≤ 1°C/m
- Veranderingssnelheid temperatuur: ≤ 1°C/h
Pneumatische vereisten:
- Luchtdruk: 0,4 MPa - 0,6 MPa
- Luchtstroom: 25 L/min
Prestatiespecificaties:
- Meetnauwkeurigheid lengte (MPEE): ≤ (2,1 + L/350) μm, waarbij L de gemeten lengte in mm is.
- Aftastfout (MPEP): ≤ 2,1 μm
Belangrijkste kenmerken:
De machine maakt gebruik van geleidingsrails van natuurlijk graniet voor alle drie de assen, waardoor een superieure thermodynamische stabiliteit in de hele structuur wordt gegarandeerd. Deze ontwerpkeuze elimineert nauwkeurigheidsfouten die zouden kunnen ontstaan door verschillen in thermische uitzetting tussen materialen, zoals zou kunnen optreden bij machines die gemengde materialen gebruiken voor verschillende assen. De uniforme thermische eigenschappen van graniet dragen bij aan consistente prestaties onder verschillende omgevingscondities en meetduur.
Vergelijking van graniet en aluminiumlegering voor de luchtvaart
Aluminiumlegeringen hebben een aanzienlijk hogere thermische uitzettingscoëfficiënt dan graniet. Deze inherente eigenschap kan leiden tot instabiliteit in de afmetingen van precisieapparatuur.
In coördinaten meetmachines (CMM's) zijn componenten zoals balken en z-as structuren, vervaardigd uit aluminiumlegeringen van luchtvaartkwaliteit, gevoelig voor dimensionale veranderingen en nauwkeurigheidsafwijkingen na verloop van tijd, vooral bij langdurig gebruik en thermische cycli.
Hoogwaardige CMM's gebruiken daarentegen vaak graniet voor kritische structurele componenten. Het platform van het driecoördinatensysteem en de hoofdas zijn meestal gemaakt van precisiegeslepen granieten blokken. Deze materiaalkeuze zorgt voor superieure thermische stabiliteit en trillingsdemping.
De hoofdas is gemaakt van graniet, terwijl de balk en de z-as een hybride ontwerp kunnen hebben met aluminiumlegeringen en andere materialen voor geoptimaliseerd gewicht en stijfheid. Deze combinatie van materialen met verschillende thermische uitzettingscoëfficiënten kan echter meetfouten en stabiliteitsproblemen veroorzaken bij temperatuurschommelingen.
Om deze uitdagingen te beperken, gebruiken geavanceerde CMM's een volledig granieten rechthoekige structuur voor het drie-assige geleidingssysteem. Dit ontwerp wordt aangevuld met zeer nauwkeurige, zelfreinigende voorgespannen luchtlagers. De monolithische granieten structuur garandeert langdurige dimensionale stabiliteit en meetnauwkeurigheid.
De luchtlagers zorgen voor een stabiele en uitgebalanceerde krachtverdeling langs de axiale richting, waardoor slijtage aanzienlijk wordt verminderd en de kritische onderdelen van de machine langer meegaan. Dit ontwerp minimaliseert ook wrijving en stick-slip effecten, waardoor de herhaalbaarheid van metingen verbetert.
Er wordt een gepatenteerde technologie met een kleine luchtuitlaat toegepast, met een geoptimaliseerd luchtverbruik van 30 l/min. Deze innovatie creëert een gelokaliseerd condensatie-effect binnen de lagerspeling, waardoor de warmte die wordt gegenereerd door de resterende wrijving van de lagerbeweging effectief wordt tegengegaan en de algehele thermische stabiliteit van de apparatuur wordt verbeterd.
Het onderliggende fysische principe maakt gebruik van het gedrag van gas dat onder druk door een ronde opening gaat. Terwijl conventionele wijsheid suggereert dat dit proces wrijvingswarmte genereert, wat schadelijk kan zijn voor zeer nauwkeurige metingen, veroorzaakt het ontwerp met een klein gat een uniek fenomeen. Wanneer de diameter van de uitlaatopening kleiner wordt dan een kritieke drempelwaarde, treedt er een condensatie-effect op in de onmiddellijke omgeving van de opening. Deze plaatselijke koeling compenseert effectief de minimale warmte die wordt gegenereerd door luchtwrijving tijdens het meten.
Door gebruik te maken van dit fysische principe met behulp van de technologie voor kleine gasuitlaten, kan de CMM gedurende langere perioden een uitzonderlijke temperatuurstabiliteit handhaven. Deze strategie voor thermisch beheer is cruciaal voor consistente meetnauwkeurigheid en betrouwbaarheid in precisiemeettoepassingen.
Vergelijking van CMM lagers van grote leveranciers
De drie assen hebben Renishaws eersteklas vergulde optische schalen, die een uitzonderlijke resolutie van 0,1 μm (micrometer) bieden. Dit uiterst nauwkeurige lineaire coderingssysteem zorgt voor nauwkeurige positieterugkoppeling en meetmogelijkheden.
Het ontwerp van de meetschaalbevestiging maakt gebruik van een vaste configuratie, waarbij het ene uiteinde stevig is verankerd en het andere kan zweven. Deze opstelling compenseert thermische uitzetting en inkrimping, waardoor meetfouten door omgevingstemperatuurschommelingen tot een minimum worden beperkt.
Het bewegingssysteem maakt gebruik van een geavanceerd kinematisch ontwerp dat de aandrijfkrachten loskoppelt van de lageroppervlakken. Deze geavanceerde benadering elimineert geïnduceerde spanningen op de geleiders, waardoor zowel de meetnauwkeurigheid als de mechanische stabiliteit op de lange termijn worden gemaximaliseerd.
Voor de asaandrijving wordt een staalversterkt synchroon riemtransmissiesysteem gebruikt. Dit ontwerp biedt superieure trillingsdempende eigenschappen tijdens snelle verplaatsingen, en tegelijkertijd een hoge treksterkte, uitstekende positioneersnelheid en langere levensduur.
De CMM werkt op Rational-DMIS software, een toonaangevend meetpakket gecertificeerd door de Physikalisch-Technische Bundesanstalt (PTB). Met dit krachtige maar intuïtieve softwareplatform kunnen gebruikers zich richten op meettaken in plaats van op complexe programmering, waardoor het inspectieproces wordt gestroomlijnd.
2. Basiscomponenten van CMM
X-straal:
Bevat geavanceerde precisietechnologie met schuine bundel, waardoor de structurele stijfheid wordt verbeterd en thermische vervorming wordt geminimaliseerd voor een betere meetnauwkeurigheid.
Geleiderail in Y-richting:
Bevat een eigen positioneerstructuur met integrale onderste zwaluwstaartgroeven die rechtstreeks in de werkbank zijn gefreesd, voor een superieure uitlijning en minder montagefouten.
Geleiderailsysteem:
Maakt gebruik van zelfreinigende, voorgespannen hoge-precisie luchtlagers die bestaan uit vier-weg statische druk lucht zwevende geleiderails. Dit ontwerp minimaliseert wrijving, verbetert de soepelheid van de beweging en zorgt voor een constante nauwkeurigheid.
Aandrijfsysteem:
Maakt gebruik van krachtige DC-servomotoren gekoppeld aan flexibele synchrone tandriemaandrijfmechanismen. Elke as wordt elektronisch geregeld en mechanisch begrensd, wat resulteert in een snelle overbrenging, betere bewegingsprestaties en een grotere positioneringsprecisie.
Z-as spindel:
Integreert een instelbare pneumatische balanceerinrichting, waardoor de positioneringsnauwkeurigheid en herhaalbaarheid van de z-as metingen aanzienlijk verbetert. Deze voorziening compenseert gewichtvariaties van de taster en zorgt voor een consistente contactkracht.
Besturingssysteem:
Maakt gebruik van een geavanceerd geïmporteerd dubbelcomputersysteem met drie coördinaten voor gespecialiseerde besturing, waardoor parallelle verwerking en redundantie mogelijk zijn voor verbeterde betrouwbaarheid en prestaties.
Machinesysteem:
Bevat computerondersteunde 3D-foutcorrectietechnologie (CAA), die zorgt voor langdurige stabiliteit en hoge nauwkeurigheid van het systeem. Deze adaptieve technologie compenseert geometrische fouten en thermische variaties in real-time.
Meetsoftware:
Maakt gebruik van het uitgebreide 3D-DMIS meetsoftwarepakket, dat een volledig spectrum aan meetfuncties, geavanceerde mogelijkheden voor gegevensanalyse en naadloze online integratie met CAD/CAM-systemen biedt voor efficiënte inspectieprocessen.
3. Functioneel principe van CMM
Een coördinatenmeetmachine (CMM) is een precisiemeetinstrument dat ontworpen is om de geometrische eigenschappen van objecten met hoge nauwkeurigheid te meten. Hij bestaat uit drie hoofdcomponenten: een geleidingsmechanisme, lengtemeetelementen en digitale displayapparaten, allemaal uitgelijnd langs drie onderling loodrechte assen (X, Y en Z). Het systeem bevat ook een werktafel om het gemeten object te ondersteunen, hoewel de grootte van deze tafel kan variëren afhankelijk van de beoogde toepassingen van de CMM.
De meetkop, vaak uitgerust met een schakelende taster of optische sensor, kan handmatig of via computergestuurde motorisatie naar specifieke meetpunten worden bewogen. Als de taster in contact komt met het werkstuk (of gegevens optisch vastlegt), genereert hij een triggersignaal. Tegelijkertijd meten uiterst precieze lineaire encoders (meestal optische schalen of glazen schalen) langs elke as de exacte positie van de tasterpunt in de 3D-ruimte.
De kernfunctie van een CMM ligt in het vermogen om de ruimtelijke coördinaten van elk punt binnen het meetvolume nauwkeurig te bepalen en weer te geven. Dit wordt bereikt door een verfijnde integratie van mechanische precisie, sensortechnologie en gegevensverwerking:
- Tasterinteractie: Wanneer de taster contact maakt met het werkstuk (of gegevens optisch vastlegt), stuurt hij een bemonsteringspuntsignaal naar het besturingssysteem van de CMM.
- Positie uitlezen: Het besturingssysteem registreert onmiddellijk de huidige positie van de tasterpunt ten opzichte van de oorsprong van de machine (0,0,0 punt) door de waarden van de lineaire encoders op elke as uit te lezen.
- Gegevensverwerking: Het computersysteem van de CMM verwerkt deze ruwe coördinaatwaarden en past verschillende compensaties toe (bijvoorbeeld kalibratie-offsets van tasters, temperatuurcompensatie) om de nauwkeurigheid te garanderen.
- Weergave en analyse: De verwerkte coördinatengegevens worden vervolgens weergegeven op de interface van de CMM en kunnen worden gebruikt voor diverse analytische doeleinden, zoals dimensionale metingen, geometrische toleranties of vergelijking met CAD-modellen.
Moderne CMM's hebben vaak geavanceerde functies die verder gaan dan dit basisprincipe, zoals:
- Temperatuurcompensatiesystemen om rekening te houden met thermische uitzetting van de machine en het werkstuk
- Luchtlagers voor een soepele, wrijvingsarme beweging van de meetkop
- Automatische tasterwisselsystemen voor flexibiliteit in meettaken
- Geavanceerde software voor complexe geometrieanalyse, GD&T-evaluatie en CAD-vergelijking
Hoewel dit de fundamentele werking van een CMM beschrijft, is het belangrijk op te merken dat de technologie zich blijft ontwikkelen, met ontwikkelingen op gebieden zoals contactloos meten, multi-sensor systemen en integratie met Industrie 4.0 concepten die de mogelijkheden en toepassingen van deze cruciale meetinstrumenten verder uitbreiden.
4. Classificatie van CMM's
Volgens de structuur van CMM kan het worden onderverdeeld in de volgende categorieën:
1. Type bewegende brug
De meest gebruikte coördinatenmeetmachine (CMM) is het mobiele brugtype.
De as, de hoofdas die in verticale richting beweegt, wordt geleid door een doosvormig frame om langs de horizontale balk te bewegen.
De horizontale balk, die loodrecht op de as staat, wordt aan beide uiteinden ondersteund door twee kolommen, die een "brug" vormen. De brug beweegt langs twee geleidingsgroeven die loodrecht op de as staan in het horizontale vlak.
Dankzij de ondersteuning door stutten aan beide uiteinden van de balk heeft het mobiele brugtype een lagere minimale doorbuiging en een hogere nauwkeurigheid vergeleken met het cantilevertype.
2. Type brugbed
Bij het brugbed beweegt de hoofdas in verticale richting en wordt hij geleid door een doosvormig frame om langs de balk van de verticale as te bewegen. De balk beweegt langs twee horizontale geleiderails in axiale richting, die zich aan de bovenkant van de pilaren bevinden die op het machinelichaam zijn bevestigd.
Dit type is vergelijkbaar met het mobiele brugtype, omdat beide uiteinden van de balk ondersteund worden, wat resulteert in een minimale doorbuiging van de balk en een hogere nauwkeurigheid vergeleken met het cantilever type.
Bovendien beweegt alleen de balk in de axiale richting, wat de algehele traagheid vermindert en handmatige bediening eenvoudiger maakt in vergelijking met het mobiele brugtype.
3. Portaaltype
Het brugportaaltype, ook bekend als het vloer- of deurtype, verschilt van het brugbedtype doordat het direct aan de vloer bevestigd is.
Dit type structuur biedt meer stijfheid en stabiliteit vergeleken met de brug van het bedtype en wordt vaak gebruikt in grotere driecoördinaten meetinstrumenten.
Elke as wordt aangedreven door een motor, waardoor een groot meetbereik mogelijk is. De operator kan ook binnen de brugstructuur werken.
4. Type vaste brug
Het vaste brugtype heeft een hoofdas die in verticale richting beweegt en wordt geleid door een doosvormig frame om langs de horizontale balk van de verticale as te bewegen.
De brug of pijler is bevestigd op het machinelichaam, terwijl de meettafel in axiale richting langs de geleiderail van het horizontale vlak beweegt, dat loodrecht op de as staat.
Elke as wordt aangedreven door een motor om de positienauwkeurigheid te handhaven. Dit model is echter niet ontworpen voor handmatige bediening.
5. L-vormige brug
De L-vormige brug is ontworpen om de traagheid van de brug te verminderen wanneer de as beweegt.
Vergeleken met het mobiele brugtype heeft dit ontwerp minder traagheid in de bewegende onderdelen, waardoor het gemakkelijker te bedienen is. Het heeft echter een lagere stijfheid.
6. Sledemodel met vaste tafel
De beweegbare cantilever heeft een hoofdas die in verticale richting beweegt en wordt geleid door een doosvormig frame om langs de horizontale cantileverbalk van de verticale as in axiale richting te bewegen. De cantileverbalk beweegt langs een geleidingsgroef op het horizontale vlak, dat loodrecht op de as staat.
Dit type structuur is aan drie kanten open en is handig voor het monteren en demonteren van werkstukken, omdat ze buiten de tafel kunnen uitsteken. De nauwkeurigheid is echter lager door het cantileverontwerp.
7. Eén kolom verplaatsbaar type
Het mobiele type met één pijler heeft een hoofdas die in verticale richting beweegt, en de hele pijler beweegt langs de geleidegroef van het horizontale vlak, dat loodrecht op de as staat, verbonden met de as.
De meettafel beweegt in axiale richting langs de geleidingsgroef van het horizontale vlak, dat loodrecht op de as staat.
Dit type structuur heeft een goede stijfheid in zowel de meettafel als de kolom, wat leidt tot minimale vervorming. Bovendien is de lineaire schaalverdeling van elke as dicht bij de meetas geplaatst, zodat wordt voldaan aan het theorema van Abbe.
8. Type xy-tabel met één kolom
De meettafel met enkele kolom is van het mobiele type, met een hoofdas die in verticale richting beweegt.
De zuil is voorzien van een asgeleider en wordt bevestigd aan de behuizing van het meetinstrument.
Tijdens het meten beweegt de meettafel langs de as in de richting van het horizontale vlak.
9. Horizontale arm voor bewegende tafel
De meettafel met horizontale arm is van het mobiele type, met een boxframe dat de horizontale arm ondersteunt om in verticale richting (as) langs de verticale pijler te bewegen. De taster is in horizontale richting aan de cantilever bevestigd.
De zuil beweegt in axiale richting langs de geleidegroef in het horizontale vlak, dat loodrecht op de as staat. De meettafel beweegt ook in axiale richting langs de geleidingsgroef in het horizontale vlak, dat loodrecht op de as en de as staat.
Dit ontwerp is een verbetering ten opzichte van het horizontale cantilevertype, omdat het de doorbuiging elimineert die wordt veroorzaakt door het uit- of inschuiven van de horizontale arm in axiale richting.
10. Vaste tafel horizontaal armtype
Het meetplatform met horizontale arm is van het vaste type en heeft een vergelijkbare structuur als het mobiele type.
De meettafel is vast en de X-, Y- en Z-as bewegen langs de geleidingsgroef. Tijdens de meting beweegt de pijler in de geleidegroef van de as, terwijl de schuiftafel die aan de as is bevestigd in de verticale asrichting beweegt.
11. Horizontaal armbewegend type
Het horizontale armtype heeft een vrijdragende as die in horizontale richting beweegt en een kokerframe dat de horizontale arm ondersteunt en langs de kolom in axiale richting beweegt. De kolom staat loodrecht op de as.
De pilaar beweegt in axiale richting langs de geleidegroef van het horizontale vlak, die loodrecht op de as staat, waardoor hij ongeschikt is voor zeer nauwkeurige metingen, tenzij de horizontale arm wordt uitgeschoven of ingetrokken om fouten door gewicht te compenseren.
Dit type structuur wordt voornamelijk gebruikt voor voertuiginspectie.
12. Type ringbrug
Het gesloten brugtype staat bekend om zijn stabiliteit, omdat het aandrijfmechanisme zich in het midden van de werkbank bevindt. Dit ontwerp helpt de impact te verminderen die veroorzaakt wordt door de beweging van de brug, waardoor het de meest stabiele van alle driecoördinaten meetinstrumenten is.
5. Belangrijkste voordelen
- Oppervlakte geanodiseerde luchtvaartaluminiumlegering;
- Zeer nauwkeurig zelfreinigend luchtlager;
- Hoge precisie Europese geïmporteerde tralie liniaal;
- Gepatenteerde technologie van precisiedriehoekstraal.
6. Toepassingsvelden
Het gesloten brugtype wordt veel gebruikt in diverse industrieën, waaronder de auto-industrie, elektronica, machinebouw, luchtvaart en militaire sector, voor het meten van diverse objecten zoals dozen, frames, tandwielen, nokken, wormwielen, wormen, bladen, krommen, gebogen oppervlakken, hardware, kunststof en meer. Hij wordt ook vaak gebruikt in de matrijzenindustrie.
7. Wijze van gebruik
Driecoördinatenmeetmachines (CMM's) worden meestal ingedeeld in drie categorieën: contactmeting, contactloze meting en gecombineerde contact- en contactloze meting.
Contactmeting is een veelgebruikte methode voor het meten van bewerkte producten, geperste producten en metaalfolies. Het scannen van datapunten op het oppervlak van het gemeten object met een CMM is vaak nodig voor het analyseren van bewerkingsgegevens of voor reverse-engineering doeleinden.
Met de Foundation-Pro CMM als voorbeeld beschrijft dit artikel de verschillende gangbare scanmethodes en bedieningsstappen voor CMM's.
Bij het scannen van een CMM worden datapunten verzameld in een specifiek gebied op het oppervlak van het te meten object met behulp van het DMIS-programma van de pc. Dit gebied kan een lijn, vlek, deel van het onderdeel, kromming van het onderdeel of een omtrek op een bepaalde afstand van de rand zijn.
Het type scan is afhankelijk van de meetmodus, het type taster en of er CAD-bestanden beschikbaar zijn. De optie "scannen" op het bedieningsscherm wordt bepaald door de statustoets (handmatig/DCC).
Als de DCC-methode wordt gebruikt voor metingen en er CAD-bestanden beschikbaar zijn, zijn de beschikbare scanmethoden "open lijn", "gesloten lijn", "patch", "doorsnede" en "perimeter" scannen. Als er alleen wireframe CAD-bestanden beschikbaar zijn, zijn de beschikbare scanmethoden "open lijn", "gesloten lijn" en "patch" scannen.
Als de handmatige meetmodus wordt gebruikt, is alleen de basismodus "handmatige TTP-scan" beschikbaar. Als de handmatige meting wordt gebruikt met een starre taster, zijn de beschikbare opties vaste delta, variabele delta, tijdsdelta en scan van de lichaamsas.
Dit artikel geeft een gedetailleerde uitleg van de vijf scanmodi die kunnen worden geselecteerd wanneer het menu "utility" wordt geopend en de optie "scan" wordt geselecteerd onder DCC-status.
1.Open Lineair scannen
Open lijn scannen is de eenvoudigste scanmodus. De taster start vanaf het startpunt, scant langs een gespecificeerde richting met een vooraf bepaalde stapgrootte en eindigt bij het eindpunt.
Open lijn scannen kan verdeeld worden in twee gevallen op basis van de beschikbaarheid van een CAD model.
(1) Zonder CAD-model:
Als het gemeten werkstuk geen CAD-model heeft, voer dan eerst de nominale waarden van de grenspunten in. Open de optie "grenspunt" in het dialoogvenster, klik op "1" om de gegevens van het beginpunt in te voeren. Dubbelklik vervolgens op "d" om de nieuwe X-, Y- en Z-coördinaatwaarden van het richtingspunt (het coördinaatpunt dat de scanrichting aangeeft) in te voeren. Dubbelklik ten slotte op "2" om de gegevens van het eindpunt in te voeren.
Voer vervolgens de stapgrootte in. Voer een nieuwe waarde voor de staplengte in in de kolom "Max Inc" in de kolom "Direction 1 Tech" in het dialoogvenster Scan. Controleer ten slotte of de ingestelde richtingsvector correct is, die de normaalvector van het oppervlak van het eerste meetpunt na het begin van het scannen, de doorsnede en de oppervlaknormaalvector van het laatste punt voor het einde van het scannen definieert. Klik op "create" nadat alle gegevens zijn ingevoerd.
(2) Met CAD-model:
Als het gemeten werkstuk een CAD-model heeft, klik dan aan het begin van het scannen met de linkermuisknop op het overeenkomstige oppervlak van het CAD-model, waarna het PC DMIS-programma een punt op het CAD-model genereert en dit markeert als "1", het startpunt. Klik vervolgens op het volgende punt om de scanrichting te bepalen. Klik tenslotte op het eindpunt (of grenspunt) en markeer dit als "2". Verbind de lijn tussen "1" en "2".
Voor elk geselecteerd punt voert het PC DMIS-programma de overeenkomstige coördinaatwaarde en vector in het dialoogvenster in. Na het bepalen van de stapgrootte en andere opties (zoals veiligheidsvlak, enkel punt, enz.), klikt u op "measure" en vervolgens op "create".
2. Gesloten lineaire scan
Met de modus voor gesloten lijn scannen kan het binnen- of buitenoppervlak van een werkstuk worden gescand. Er zijn slechts twee waarden nodig, het "startpunt" en het "richtpunt" (PC DMIS neemt het startpunt als eindpunt).
(1) Bediening gegevensinvoer:
Dubbelklik op het grenspunt "1" om de positie ervan in te voeren in het dialoogvenster Bewerken. Dubbelklik op het richtingspunt "d" om de coördinaatwaarde in te voeren. Selecteer het scantype ("lineair" of "variabel"), voer de stapgrootte in en definieer het aanraaktype ("vector", "oppervlak" of "rand").
Dubbelklik op de "initiële vector" en voer de vector in op punt "1". Controleer de vector van de doorsnede. Klik na het invoeren van de andere opties op "create".
U kunt ook het eerste meetpunt op het oppervlak van het werkstuk aanraken met het bedieningspaneel van de coördinatenmeetmachine en vervolgens het richtingspunt aanraken. Het DMIS-programma van de pc voert automatisch de gemeten waarde in het dialoogvenster in en berekent de initiële vector.
Nadat u de scanbesturingsmodus, het type meetpunt en andere opties hebt geselecteerd, klikt u op "maken".
(2) Gesloten lijn scannen met CAD-model:
Als het gemeten werkstuk een CAD-model heeft, bevestig dan "gesloten lijn scannen" voor de meting. Klik eerst op het startpunt van het oppervlak om symbool "1" op het CAD-model te genereren (tijdens het klikken worden het oppervlak en de grenspunten gemarkeerd om het juiste oppervlak te helpen selecteren). Klik vervolgens op het punt van de scanrichting.
PC DMIS geeft de overeenkomstige coördinaten en vectoren van de geselecteerde punten in het dialoogvenster. Klik op "maken" nadat u de scanbesturingsmethode, stapgrootte en andere opties hebt geselecteerd.
3. Patchscan
Met de Patch scanmodus kunt u een gebied scannen in plaats van een enkele scanlijn.
Deze scanmethode vereist minstens vier grenspuntinformatie, waaronder het beginpunt, het richtpunt, de scanlengte en de scanbreedte.
De PC DMIS kan het driehoekige vlak berekenen op basis van de grenspunten 1, 2 en 3, die worden gedefinieerd door de basis- of standaardinformatie. De scanrichting wordt bepaald door de coördinaatwaarde van punt D.
Als je een vierde of vijfde grenspunt toevoegt, kan de patch een vierkante of vijfhoekige vorm hebben.
Wanneer u de Patch Scanning Method gebruikt, zorg er dan voor dat u "Closed Line Scanning" selecteert in het selectievakje om gesloten elementen zoals cilinders, kegels, groeven, enz. te scannen. Voer vervolgens het beginpunt, eindpunt en richtingspunt in.
De eindpuntpositie vertegenwoordigt de omhoog of omlaag bewogen afstand tijdens het scannen van het gemeten element.
De vector van het doorsnedevlak kan gedefinieerd worden door het startpunt, het richtpunt en de startvector (die meestal evenwijdig is aan het gemeten element).
Drie methoden voor het definiëren van patch scanning worden geïntroduceerd, met het creëren van vierzijdige patches als voorbeeld:
(1) Coördinaatwaarde-invoer:
- Dubbelklik op grenspunt "1" en voer de X-, Y- en Z-coördinaatwaarden van het beginpunt in.
- Dubbelklik op grensrichtingspunt "d" en voer de coördinaatwaarde van het scanrichtingspunt in.
- Dubbelklik op grenspunt "2" en voer de scanbreedte in om de eerste richting te definiëren.
- Dubbelklik op grenspunt "3" en voer de scanbreedte in om de tweede richting te definiëren.
- Klik op "3" en druk dan op de knop "Toevoegen" om het vierde grenspunt weer te geven in het dialoogvenster.
- Dubbelklik op grenspunt "4" en voer de coördinaatwaarde van het eindpunt in.
- Nadat u de stapgrootte en de maximale stapgrootte voor het scannen hebt gedefinieerd, klikt u op "Aanmaken".
(2) Aanraaktestmodus:
- Selecteer de modus "Patch scannen" en raak het eerste punt op het gewenste startpunt aan met de taster van de coördinatenmeetmachine.
- De coördinaatwaarde van dit punt wordt weergegeven in het item "#1" van het dialoogvenster "Grenspunt".
- Raak het tweede punt aan, dat het eindpunt van de eerste scanrichting vertegenwoordigt, en de coördinaatwaarde wordt weergegeven in het item "d" van het dialoogvenster.
- Raak het derde punt aan, dat de breedte van de gescande patch vertegenwoordigt, en de coördinaatwaarde ervan zal worden weergegeven in het item "#3" van het dialoogvenster.
- Klik op "3" en selecteer "Toevoegen" om het vierde punt toe te voegen aan de lijst.
- Raak het eindpunt aan en het dialoogvenster wordt gesloten.
- Definieer ten slotte de scanlijnafstand en staplengte in beide richtingen.
- Nadat u het type scantouch en de vereiste opties hebt geselecteerd, klikt u op "Aanmaken".
(3) Modus CAD Oppervlaktemodel:
- Deze scanmethode is alleen van toepassing op werkstukken met een CAD-oppervlakmodel.
- Selecteer de modus "Patch scannen" en klik met de linkermuisknop op het CAD-werkvlak.
- Markeer "1" in het dialoogvenster "Begrenzingspunt" en klik met de linkermuisknop op het scanstartpunt op het oppervlak.
- Markeer "d" en klik op het oppervlak om het richtingspunt te definiëren.
- Klik op het oppervlak om de scanbreedte te definiëren (#2).
- Klik op het oppervlak om de breedte van de scan te definiëren (#3).
- Klik op "3", selecteer "Add", voeg het extra punt "4" toe, markeer "4", klik om het eindpunt van het scannen te definiëren en sluit het dialoogvenster.
- Nadat je de stappen in beide richtingen hebt gedefinieerd en de gewenste opties hebt geselecteerd, klik je op "Aanmaken".
4. Sectiescan
De modus Sectiescannen is alleen van toepassing op werkstukken met een CAD-oppervlakmodel.
Hiermee kan een specifiek deel van het werkstuk worden gescand.
De gescande doorsnede kan langs de X-, Y- of Z-as liggen of onder een specifieke hoek met de coördinatenas.
Er kunnen meerdere sectiescans worden uitgevoerd door de stapgrootte te definiëren.
U kunt het grenspunt van de doorsnedescan instellen in het dialoogvenster.
Door op de conversieknop "Cut CAD" te drukken, kun je gaten in het CAD-oppervlakmodel lokaliseren en de begrenzingslijn ervan definiëren op dezelfde manier als bij Open Line Scanning.
Het PC DMIS programma zal automatisch het scanpad aanpassen om gaten in het CAD oppervlakmodel te vermijden.
Voer de volgende stappen uit om het CAD-oppervlakmodel te snijden met een door de gebruiker gedefinieerd oppervlak:
- Voer de optie "Grenspunt" in.
- Ga naar het vak "CAD Element Selection".
- Selecteer het oppervlak.
- Selecteer de optie "Cut CAD" zonder het vak "CAD Element Selection" leeg te maken.
Op dit punt zal het DMIS-programma van de pc het geselecteerde oppervlak snijden om eventuele gaten te vinden.
Als er geen gaten zijn gedefinieerd in het CAD-oppervlakmodel, is het niet nodig om de optie "CAD snijden" te selecteren. In dit geval scant PC DMIS volgens de gedefinieerde begin- en eindpunten.
Voor complexe CAD-afbeeldingen met meerdere oppervlakken kunnen verschillende oppervlakken worden onderverdeeld in groepen. Het aantal groepen is beperkt tot de lokale CAD-oppervlaktemodellen.
5. Omtrekscan
De Perimeter Scan-methode is alleen van toepassing op werkstukken met een CAD-oppervlakmodel.
Deze scanmodus gebruikt het CAD wiskundige model om het scanpad te berekenen, dat verschoven wordt van de grens of buitencontour met een door de gebruiker geselecteerde afstand.
Volg deze stappen om een grensscan te maken:
- Selecteer eerst de optie "Boundary Scan".
- Als het een interne grensscan is, selecteer dan "Internal Boundary Scan" in het dialoogvenster.
- Wanneer je een werkoppervlak selecteert, start je het selectievakje "Selecteren", markeer je elk geselecteerd oppervlak en sluit je het selectievakje af nadat je alle gewenste oppervlakken hebt geselecteerd.
- Klik op het oppervlak om het beginpunt van het scannen te bepalen.
- Klik op hetzelfde oppervlak om het punt voor de scanrichting te bepalen.
- Klik op het oppervlak om het eindpunt van het scannen te bepalen. Als er geen eindpunt is opgegeven, wordt het beginpunt als eindpunt gebruikt.
- Voer de overeenkomstige waarden in het bewerkingsvak "Scan Structure" in (inclusief "Value Added", "CAD Tolerance", enzovoort).
- Selecteer de optie "Boundary berekenen" om de scangrens te berekenen.
- Nadat u hebt bevestigd dat de afwijkingswaarde correct is, drukt u op de knop "Meetpunt genereren". Het DMIS-programma van de pc berekent automatisch de theoretische waarde van het aftasten.
- Klik op "Maken".
6. Toepassingspunten
(1) Om de nauwkeurigheid van de gegevensverwerving en de efficiëntie van de meting te verbeteren, is het belangrijk om de juiste scannende meetmodus te kiezen op basis van de specifieke kenmerken en modelleringsvereisten van het te meten werkstuk.
(2) De klemming De positie van het werkstuk moet zorgvuldig gepland worden om het meetproces en de beweging van de taster te vergemakkelijken. Om de nauwkeurigheid van de modellering te garanderen, moet de taster zo geplaatst worden dat hij de scannende metingen van alle objecten tegelijk uitvoert wanneer hij het werkstuk vastklemt.
(3) De selectie van scanmeetpunten moet belangrijke punten van de geometrische informatie van de contour van het werkstuk omvatten en meetpunten moeten op de juiste manier worden toegevoegd aan onderdelen met significante krommingsveranderingen.
8. Beheer van gegevens
1. Gegevensconversie
Taken en vereisten voor gegevensconversie:
(1) Converteer het meetgegevensformaat naar het IGES-formaat dat herkend wordt door CAD-software en sla het op met een productnaam of een door de gebruiker opgegeven naam na het combineren.
(2) Gegevens met verschillende producten, verschillende attributen en verschillende positionering die tot verwarring kunnen leiden, moeten worden opgeslagen in aparte bestanden en moeten worden georganiseerd en gescheiden in IGES-bestanden.
De gegevensconversie wordt uitgevoerd door het systeem voor gegevensverwerking van coördinatenmetingen.
Raadpleeg de gebruikershandleiding van de software voor de bedieningsmethode.
2. Verhuizing en integratie
Achtergrond van de toepassing
Tijdens het opmeten en in kaart brengen van producten is het om verschillende redenen vaak niet mogelijk om de geometrische gegevens van het product in hetzelfde coördinatensysteem te meten.
De eerste reden is dat de productgrootte groter is dan de slag van de meetmachine.
De tweede reden is dat de meetsonde de andere kant van het product niet kan bereiken.
De derde reden is dat gegevens ontbreken nadat het werkstuk is verwijderd en opnieuw gemeten moet worden.
In dergelijke gevallen is het nodig om elk onderdeel van het product te meten in verschillende positioneringstoestanden (d.w.z. verschillende coördinatensystemen), wat bekend staat als Product Relocation Measurement.
Bij het modelleren moeten gegevens van verschillende coördinatensystemen in verschillende positioneringstoestanden worden getransformeerd naar hetzelfde coördinatensysteem, wat de integratie van verplaatsingsgegevens wordt genoemd.
Voor complexe of grote modellen zijn tijdens het meetproces vaak meerdere positioneringsmetingen nodig.
De uiteindelijke meetgegevens moeten meerdere keren worden verplaatst en geïntegreerd volgens een specifiek conversietraject, om de gegevens die bij elke positionering zijn gemeten om te zetten in meetgegevens onder een gemeenschappelijke positioneringsbenchmark.
Integratieprincipe van verhuizing
Er is een discrepantie tussen de meetgegevens nadat het werkstuk is verplaatst (verplaatst) en de meetgegevens vóór de verplaatsing.
Om de verplaatste meetgegevens te integreren in de gegevens vóór de verplaatsing, moet een vorm worden vastgesteld die zowel vóór als na de verplaatsing op het werkstuk kan worden gemeten (de relocatiebenchmark genoemd). Zolang de meetresultaten van de vorm na verplaatsing via een reeks transformaties overeenkomen met de meetresultaten voor verplaatsing, kunnen de verplaatste meetgegevens worden geïntegreerd in de gegevens voor de verplaatsing.
De Relocation Benchmark dient als schakel in de integratie van verhuisgegevens.
PID-besturing staat voor Proportionele, Integrale en Differentiële besturing.
P-parameter:
Het reactieproces van het systeem op de positiefout kan worden bepaald door de relatie tussen de stabiliteit, stijfheid en positioneringsfout van het systeem te analyseren.
Een lagere waarde duidt op een stabieler systeem met minder oscillatie, maar met een zwakkere stijfheid en een grotere positioneringsfout.
Aan de andere kant resulteert een hogere waarde in een betere stijfheid en een kleinere positioneringsfout, maar kan het systeem last hebben van oscillatie.
I Parameter:
De controle van de statische positioneerfout veroorzaakt door wrijving en belasting wordt bepaald door de relatie tussen de controlewaarde en de aankomsttijd op de theoretische positie.
Een lagere waarde resulteert in een langere aankomsttijd.
Een hogere waarde vergroot de kans op oscillatie op de theoretische positie.
D parameter:
De parameter biedt stabiliteit en demping aan het systeem door overmatige foutverandering te voorkomen.
Een lagere waarde resulteert in een snellere reactie van het systeem op de positiefout.
Een hogere waarde resulteert in een tragere reactie van het systeem.
9. Dagelijks onderhoud
Om het "vakantiesyndroom" te voorkomen, moet de beheermodus van de CMM worden gewijzigd.
De CMM bestaat uit complexe componenten, waaronder mechanische onderdelen, elektrische besturingsonderdelen en computersystemen.
Het is belangrijk om de CMM goed te onderhouden terwijl deze gebruikt wordt om werkstukken te meten, om de levensduur te verlengen.
Hieronder wordt het basisonderhoud van de CMM vanuit drie perspectieven uitgelegd.
Mechanische onderdelen
Er zijn verschillende soorten mechanische componenten in een coördinatenmeetmachine (CMM). Voor een goede werking is het belangrijk om dagelijks onderhoud uit te voeren aan zowel het transmissiesysteem als de onderdelen van het luchtcircuitsysteem.
De onderhoudsfrequentie moet worden bepaald op basis van de gebruiksomgeving van de CMM. In fijne meetruimtes met optimale omstandigheden wordt regelmatig onderhoud elke drie maanden aanbevolen. In omgevingen met veel stof of waar temperatuur en vochtigheid niet voldoen aan de eisen voor een goede werking, moet het onderhoud echter maandelijks worden uitgevoerd.
Voor regelmatig onderhoud van meetmachines moeten de factoren die van invloed zijn op de meetmachines worden begrepen:
Invloed van perslucht op meetmachine
Om een geschikte luchtcompressor te kiezen, is het aan te raden om een extra luchttank te gebruiken. Dit verhoogt de levensduur en de stabiliteit van de druk van de luchtcompressor.
Het is belangrijk dat de begindruk van de luchtcompressor hoger is dan de vereiste werkdruk.
Bij het starten van de apparatuur wordt aanbevolen om eerst de luchtcompressor te activeren en vervolgens de voeding in te schakelen.
Invloed van olie en water op meetmachine
Perslucht is cruciaal voor de goede werking van een meetmachine, dus het is essentieel om het luchtcircuit goed te onderhouden.
De volgende taken moeten regelmatig worden uitgevoerd:
- Controleer elke dag voordat u de meetmachine gebruikt de leidingen en filters en laat water en olie uit het filter en de luchtcompressor/luchttank lopen.
- Reinig de filterelementen van het aangebouwde filter en voorfilter minstens om de drie maanden.
- Verkort het interval als de luchtkwaliteit slecht is. Na verloop van tijd kan olievervuiling de filterelementen verstoppen, waardoor de werkelijke luchtdruk van de meetmachine afneemt en de normale werking in gevaar komt.
- De filterelementen moeten regelmatig worden gereinigd.
- Door de geleiderail dagelijks schoon te vegen om olievlekken en stof te verwijderen, blijft de zweefgeleiderail in goede staat.
Om de geleiderail van de meetmachine te beschermen, moeten goede werkgewoonten worden gevormd
Plaats er een doek of rubberen bekleding onder om de veiligheid van de geleiderail te garanderen.
Reinig de geleiderail na werkzaamheden of voltooiing van onderdelen.
Streef tijdens het gebruik van de meetmachine naar een constante omgevingstemperatuur in de meetkamer, net als tijdens het kalibreren.
Houd er rekening mee dat elektrische apparatuur, computers en personeel warmte produceren. Zorg er tijdens de installatie voor dat elektrische apparatuur, computers, enz. zich op voldoende afstand van de meetmachine bevinden.
Beheer de meetruimte strikt en beperk de aanwezigheid van extra personeel tot een minimum.
Het beheer van de werkomgeving voor precisiemeetmachines moet bijzonder streng zijn.
Invloed van de windrichting van de airconditioning op de temperatuur van de meetmachine
Voor de airconditioning in de meetkamer kies je best voor een airconditioner met variabele frequentie.
Airconditioning met variabele frequentie heeft uitstekende energiebesparende mogelijkheden en, wat nog belangrijker is, een sterke temperatuurregeling. Bij normale capaciteit kan de temperatuur tot op ±1 ℃ nauwkeurig worden geregeld.
De lucht van de airconditioner mag niet op 20 ℃ staan en mag niet rechtstreeks op de meetmachine worden gericht. Om dit te voorkomen, kan de windrichting worden omgeleid naar een muur of zijkant, wat leidt tot een groot temperatuurverschil in de kamer.
De airconditioner moet planmatig worden geïnstalleerd, waarbij de lucht naar de hoofdruimte van de kamer wordt geblazen. De windrichting moet naar boven zijn om een grote cyclus te creëren (niet in de richting van de meetmachine) en de binnentemperatuur zoveel mogelijk in evenwicht te brengen.
Als het haalbaar is, kan een luchtkanaal worden geïnstalleerd om lucht naar de bovenkant van de ruimte te voeren via dubbellaagse smoorplaten, met de afvoerluchtuitlaat aan de onderkant van de ruimte. Dit creëert een onregelmatige luchtstroom en maakt de temperatuurregeling in de meetkamer efficiënter.
Invloed van de schakeltijd van de airconditioner op de temperatuur van de machinekamer
Je bent verplicht om het airconditioningsysteem op je werkplek elke ochtend te activeren en aan het einde van de dag weer uit te schakelen.
Zodra de temperatuur in de stand-byruimte ongeveer vier uur gestabiliseerd is, zal de nauwkeurigheid van de meetmachine ook stabiel worden.
Deze werkwijze belemmert de efficiëntie van de meetmachine echter aanzienlijk, waardoor het een uitdaging wordt om de nauwkeurigheid zowel in de winter als in de zomer te garanderen.
Dit heeft ook een aanzienlijk effect op de normale stabiliteit van de meetmachine.
Invloed van de machinekamerstructuur op de temperatuur in de machinekamer
Om de temperatuur in de meetmachineruimte constant te houden, moeten er thermische isolatiemaatregelen worden genomen.
Als er ramen zijn, moeten er ramen met dubbele beglazing worden geïnstalleerd en moet direct zonlicht worden vermeden.
Het gebruik van een overgangsruimte helpt het temperatuurverlies te beperken.
Het airconditioningsysteem in de machinekamer moet een vergelijkbare capaciteit hebben als dat van de omringende ruimte.
Als de machinekamer te groot of te klein is, levert dat problemen op met de temperatuurregeling.
In gebieden met een hoge vochtigheidsgraad in het zuiden of tijdens het zomer- of regenseizoen in het noorden kan het plotseling uitschakelen van de koelende airconditioner leiden tot snelle condensatie van waterdamp in de lucht op de lagetemperatuuronderdelen en geleiderails van de meetmachine, wat leidt tot ernstige corrosie van de luchtschoepen en sommige onderdelen van de machine, waardoor de levensduur wordt beïnvloed.
Overmatige vochtigheid kan ook corrosie of kortsluiting veroorzaken in de printplaten van computers en besturingssystemen.
Een lage luchtvochtigheid kan de waterabsorptie van graniet ernstig beïnvloeden en vervorming veroorzaken.
Stof en statische elektriciteit kunnen het besturingssysteem beschadigen.
Daarom moet de luchtvochtigheid in de machinekamer binnen 60% ± 5% worden gehouden.
Slechte afdichting en een hoge luchtvochtigheid in de meetmachineruimte zijn de belangrijkste oorzaken van een hoge luchtvochtigheid.
In gebieden met een hoge luchtvochtigheid moet de machinekamer beter worden afgedicht en moeten indien nodig ontvochtigers worden toegevoegd.
Om dit aan te pakken moet de managementmodus worden gewijzigd van "schoonmaken voor de vakantie" naar "schoonmaken tijdens het werk" en moeten de airconditioner en ontvochtiger worden ingeschakeld om vocht te verwijderen.
Regelmatige reiniging van stof in de computer en het besturingssysteem vermindert of voorkomt mogelijke problemen.
Het gebruik van standaardonderdelen voor machine-inspectie is effectief maar relatief omslachtig en kan alleen periodiek worden uitgevoerd.
Een handigere methode is om een representatief onderdeel te gebruiken, een automatisch meetprogramma samen te stellen en meerdere metingen uit te voeren nadat de nauwkeurigheid van de machine is gecontroleerd.
De resultaten kunnen worden berekend volgens statistische wetten en er kan een redelijke waarde en tolerantiebereik worden vastgelegd.
De operator kan dit onderdeel regelmatig controleren om de nauwkeurigheid van de machine te bepalen.
Aanpassing van Z-as balans
De Z-as balans van de meetmachine is verdeeld in gewicht en pneumatische balans, die helpt het gewicht van de Z-as in balans te brengen en zorgt voor een stabiele werking.
Als de luchtdrukbalansschakelaar per ongeluk wordt geactiveerd, raakt de Z-as uit balans.
Volg deze stappen om dit probleem op te lossen:
- Draai de meetbasis tot 90 graden om te voorkomen dat de meetkop contact maakt tijdens het gebruik.
- Activeer de "noodstop"-schakelaar.
- Eén persoon moet de Z-as vasthouden en op en neer bewegen om de balans te beoordelen.
- Een andere persoon moet de luchtdruk aanpassen balansventielMaak kleine aanpassingen per keer.
Twee mensen kunnen samenwerken om de balans van de Z-as aan te passen tot hij evenwichtig aanvoelt bij het op en neer bewegen.
De eindeloopschakelaar dient om de machine te beschermen en de uitgangspositie te bepalen.
De eindeloopschakelaar is meestal een contactschakelaar of een foto-elektrische schakelaar.
De contactschakelaar is geneigd van positie te veranderen wanneer de as handmatig wordt ingedrukt, wat leidt tot een slecht contact.
Voor een goed contact kan de stand van de schakelaar goed worden afgesteld.
Als je een foto-elektrische schakelaar gebruikt, is het belangrijk om te controleren of de positie van het inzetstuk normaal is en om regelmatig stof te verwijderen om de goede werking te behouden.
10. Gebruik en veiligheidsmaatregelen van CMM
Alleen personen die een training hebben gevolgd en een operationele certificering hebben gekregen, mogen de CMM bedienen.
Voordat de machine elke dag wordt opgestart, kan de schakelkast pas worden geopend als de luchttoevoerdruk voldoet aan de vereiste: de luchttoevoerdruk moet ≥ 0,65 MPa zijn en de luchtdruk van de machine moet ≥ 0,4 MPa zijn.
Als de hoogte van het olie-watermengsel in de tripletwaterbeker meer dan 5 mm bedraagt, moet het water handmatig worden afgetapt.
Als de luchttoevoerdruk van de machine normaal is, maar de druk bij het triplet niet op de normale waarde kan worden ingesteld, moet het filterelement worden vervangen.
De werkomgeving voor de CMM moet een temperatuur hebben van 20 ± 2 °C en een relatieve vochtigheid van 40-75%.
De gereguleerde voeding moet een uitgangsspanning van 220 ± 10 V hebben.
Plaats geen voorwerpen op de geleiderail van de machine.
Raak het werkoppervlak van de geleiderail niet aan met uw handen.
Reinig elke dag voordat u de machine opstart het oppervlak van de drieassige geleiderail met een hooggeweven doek van puur katoen gedrenkt in watervrije alcohol en de machine kan pas worden gebruikt als het oppervlak van de geleiderail droog is.
Gebruik geen alcohol om het geverfde oppervlak of het rooster te reinigen.
De opstartvolgorde is als volgt:
- Schakel de stroomkast in
- Zet de totale luchtbron aan
- Zet de koude droger aan
- Zet de luchtklep aan
- Schakel de voeding van de schakelkast in
- Schakel de controller van het voetstuk in
- Zet de motor aan als het lampje van de bedieningskast brandt (de noodstopsleutel moet worden losgelaten).
- Nadat de zelfinspectie van het systeem is voltooid, start u de meetsoftware, zet u de drie assen op nul (ga naar huis) en schakelt u over naar de normale werkstatus na automatische voltooiing.
Na elke keer opstarten moet de machine worden teruggebracht naar het nulpunt.
Voordat u terugkeert naar het nulpunt, brengt u de taster naar een veilige positie om er zeker van te zijn dat er geen obstakels zijn tijdens het terugstellen van de taster en de opwaartse beweging in de Z-as.
Gebruik bij het vervangen van de sonde het speciale gereedschap dat bij de machine is geleverd en kalibreer de nieuwe sonde:
- Start de software voordat u de meetsoftware opent (aanbevolen methode)
- Als de meetsoftware is ingeschakeld, druk dan op de noodstopschakelaar op de bedieningskast en schakel deze in na het vervangen.
Als er een dialoogvenster met een probe-foutmelding verschijnt, sluit dit dan (of voer 100.0.0.1 in de kolom voor het invoeren van het webadres in om de foutgeschiedenis en het bericht te bekijken). Deze melding wordt automatisch gewist tijdens de volgende opstart.
Druk tijdens handmatige bediening op de langzame toets wanneer u het bemonsteringspunt nadert.
Bij het roteren van de sonde, het kalibreren van de sonde, het automatisch verwisselen van de sonde of andere bewerkingen moet u ervoor zorgen dat er zich geen obstakels in het bewegingspad van de sonde bevinden.
Als het programma niet wordt gebruikt of niet is geprogrammeerd, zet dan de snelheid op de bedieningskast op 0.
Verlaag tijdens de eerste bewerking van het programma de snelheid naar 10-30% en controleer of de baan aan de eisen voldoet.
Bij het hanteren en plaatsen van werkstukken moet u eerst de taster naar een veilige positie brengen en ervoor zorgen dat de werkstukken niet tegen de werktafel botsen, vooral niet tegen het oppervlak van de geleiderail van de machine.
De uitschakelprocedure verloopt als volgt:
- Verplaats de Z-as naar de linkerkant, voorkant en bovenkant van de machine en draai de tasterhoek naar A0B0.
- Maak het werkoppervlak schoon.
- Schakel de pedestal controller, de voeding van de schakelkast, de luchtklep, de droger, de hoofdluchtbron en de stroomkast in deze volgorde uit.
Stalen standaardkogels die langere tijd niet worden gebruikt, moeten worden afgedicht met olie om roestvorming te voorkomen.
Wanneer een werkstuk met een inleg op het granieten werkblad wordt vastgezet, mag het koppel niet hoger zijn dan 20 Nm.
Als er abnormale condities worden gedetecteerd (met uitzondering van foutmeldingen gerelateerd aan het vervangen van de sonde), noteer dan de foutinformatie die wordt weergegeven door de software, neem contact op met de technische serviceafdeling van Hexcon via fax of telefoon, en voer geen inspectie of onderhoud uit zonder begeleiding en toestemming.
Installeer geen software die niet gerelateerd is aan de drie coördinaten op de computer om een betrouwbare werking van het systeem te garanderen.
De airconditioner moet 24 uur per dag blijven werken en het onderhoud moet in de herfst worden uitgevoerd om de normale werking van de drie coördinaten te garanderen.
FAQs over CMM-machines
Wat is CMM?
De driecoördinatenmeetmachine wordt meestal een meetsysteem genoemd dat de driedimensionale coördinaten van de oppervlaktepunten van een werkstuk bepaalt door de relatieve beweging van het tastersysteem en het werkstuk.
Het staat ook bekend als een coördinatenmeetmachine (CMM) of driecoördinatenmeetinstrument.
Heeft de temperatuur een grote invloed op de meetresultaten van de CMM?
De CMM is een complex meetsysteem dat licht, machines, elektriciteit, computers en besturingstechnologie combineert, wat betekent dat er veel factoren zijn die de onzekerheid van de meetresultaten kunnen beïnvloeden.
Voor middelgrote en kleine coördinatenstelsels is de belangrijkste factor die de onzekerheid van de meetresultaten beïnvloedt echter de afwijking van de standaard meettemperatuur (20°C) van de omgevingstemperatuur. Voor nauwkeurige coördinatenmeetresultaten moet de omgevingstemperatuur strikt gecontroleerd worden binnen het bereik dat gespecificeerd is in de instructies van de coördinatenmachine.
Welke CMM-onderdelen moeten worden gekalibreerd en hoe lang is het interval voor herkalibratie?
De huidige kalibratienorm voor drie coördinaten is JJF1064-2000 kalibratiespecificatie voor coördinatenmeetmachines, die specificeert dat de kalibratie-items indicatiefout en detectiefout bij lengtemeting zijn.
Het wordt aanbevolen om eenmaal per jaar te kalibreren.
Wanneer moet de CMM 21 fouten kalibreren?
De 21-puntsfout vormt de basis van de nauwkeurigheid van de CMM en de kalibratie ervan is complex.
Ook al wordt dit niet gespecificeerd in de norm, toch is kalibratie van de 21-puntsfout noodzakelijk onder de volgende omstandigheden: wanneer een nieuwe machine in gebruik wordt genomen, wanneer het kalibratieresultaat van de lengtemetingsfout buiten het tolerantiebereik valt, nadat de coördinatenmachine verplaatst is en nadat de coördinatenmachine gerepareerd is.