Boks Kracht Berekenaar & Formule (Online & Gratis)
Heb je je ooit afgevraagd hoe je kunt zorgen voor een succesvol metaalstempelproject? In deze blogpost duiken we in de kritieke factoren die uw stempelproces kunnen maken of breken....
Heb je je ooit afgevraagd hoe machines nauwkeurige bewegingen maken? Deze blog duikt in de fascinerende wereld van servomotorbesturingsmodi. Van pulsbesturing tot analoge besturing, we onderzoeken hoe elke methode werkt en waar deze het beste kan worden toegepast. Bereid je voor op het ontdekken van de geheimen achter de precisie en efficiëntie van moderne machines!

In sommige kleine stand-alone apparatuur is pulsbesturing om de motor te positioneren de meest voorkomende toepassingsmodus.
Deze besturingsmodus is eenvoudig en gemakkelijk te begrijpen.
Basis besturingsidee: de totale hoeveelheid pulsen bepaalt de verplaatsing van de motor en de pulsfrequentie bepaalt de motorsnelheid.
Puls wordt geselecteerd om de aansturing van de servomotor te realiseren.
Open de handleiding van de servomotor en de volgende tabel verschijnt:
| Commandopulsvorm | Naam signaal | Positief richtingscommando | Commando negatieve richting |
| 90 bit faseverschil
2-fasen puls A + B-fase | PULS TEKEN |
 B is 90 graden sneller dan fase a |
 B is 90 graden langzamer dan fase a |
| Positieve pulstrein + negatieve pulstrein | PULS TEKEN |
 |
 |
| Puls + symbool | PULS TEKEN |
 |
 |
Beide zijn pulsgestuurd, maar de implementatiemethode verschilt:
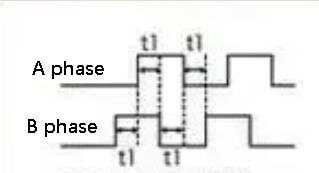
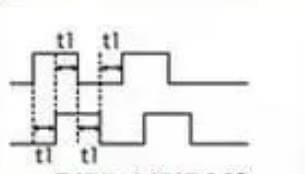
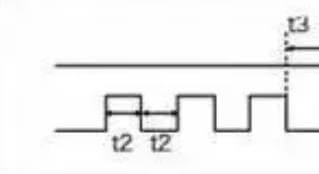
Eerst ontvangt de driver twee (a, b) hoge-snelheidspulsen en bepaalt de draairichting van de motor door het faseverschil van de twee pulsen.
Zoals de bovenstaande figuur laat zien, is er sprake van positieve rotatie als B 90 graden sneller is dan fase a; als B 90 graden langzamer is dan fase a, is er sprake van omgekeerde rotatie.
Tijdens bedrijf wisselen de tweefasige pulsen van deze regeling elkaar af, dus noemen we deze regelmethode ook wel differentiële regeling.
Het heeft differentiële karakteristieken, wat ook aantoont dat deze besturingsmodus een hoger anti-interferentievermogen heeft.
In sommige toepassingsscenario's met sterke interferentie heeft deze modus de voorkeur.
Op deze manier moet een motoras echter twee hogesnelheidspuls-poorten bezetten, wat niet van toepassing is op de spanning van de hogesnelheidspuls-poort.
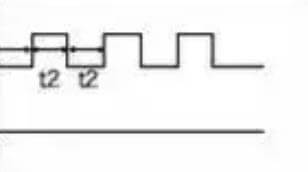
Ten tweede ontvangt de bestuurder nog steeds twee impulsen met hoge snelheid, maar de twee impulsen met hoge snelheid bestaan niet tegelijkertijd.
Wanneer één puls in de uitgangstoestand is, moet de andere in de ongeldige toestand zijn.
Bij het selecteren van deze besturingsmodus moeten we ervoor zorgen dat er slechts één puls tegelijkertijd wordt uitgevoerd.
Twee pulsen, de ene uitgang in positieve richting en de andere in negatieve richting.
Net als in het bovenstaande geval is deze modus ook een motoras, die twee pulsuitgangen voor hoge snelheid moet bezetten.
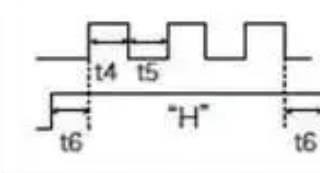
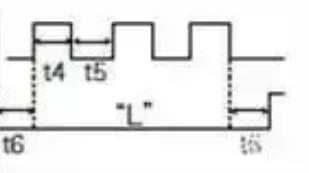
Ten derde hoeft er maar één pulssignaal aan de driver te worden gegeven en wordt de voorwaartse en achterwaartse werking van de motor bepaald door het IO-signaal in één richting.
Deze besturingsmethode is eenvoudiger te besturen en de bronbelasting van de snelle pulspoort is het laagst.
In het algemeen kan deze methode bij kleine systemen de voorkeur genieten.
In het toepassingsscenario waarin de servomotor moet worden gebruikt om de snelheid te regelen, kunnen we de analoge grootheid selecteren om de snelheid van de motor te regelen.
De waarde van de analoge grootheid bepaalt de rijsnelheid van de motor.
Analoge grootheden kunnen op twee manieren worden geselecteerd: stroom of spanning.
Je hoeft alleen maar een bepaalde spanning toe te voegen aan het uiteinde van het stuursignaal.
In sommige scenario's kun je zelfs een potentiometer gebruiken om de besturing te realiseren, wat erg eenvoudig is.
Wanneer echter de spanning als stuursignaal wordt gekozen, kan de spanning in een complexe omgeving gemakkelijk worden verstoord, wat resulteert in een onstabiele regeling.
Een overeenkomstige stroomuitgangsmodule is vereist, maar het stroomsignaal heeft een sterk anti-interferentievermogen en kan worden gebruikt in complexe scènes.
De gebruikelijke manieren om servomotorbesturing via communicatie te realiseren zijn Can, EtherCAT, MODBUS en PROFIBUS.
Communicatie gebruiken om de motor te besturen is de voorkeursbesturingsmethode in sommige complexe en grootschalige systeemtoepassingsscenario's.
Op deze manier zijn de grootte van het systeem en het aantal motorassen eenvoudig in te korten en is er geen complexe besturingsbedrading. Het gebouwde systeem is zeer flexibel.
De koppelbesturingsmodus is bedoeld om het externe uitgangskoppel van de motoras in te stellen via de invoer van externe analoge grootheden of directe adrestoewijzing.
Als 10V bijvoorbeeld overeenkomt met 5 nm, is de output van de motoras 2,5 nm wanneer de externe analoge grootheid is ingesteld op 5V.
Als de motorasbelasting kleiner is dan 2,5 nm, draait de motor vooruit, draait de motor niet als de externe belasting gelijk is aan 2,5 nm en draait de motor om als deze groter is dan 2,5 nm (meestal onder zwaartekrachtbelasting).
Het ingestelde koppel kan worden gewijzigd door de instelling van de analoge hoeveelheid in real-time te wijzigen of door de waarde van het bijbehorende adres via communicatie te wijzigen.
Het wordt voornamelijk gebruikt in op- en afwikkelapparatuur die strenge eisen stelt aan de spanning van materialen, zoals opwikkelapparatuur of apparatuur voor het trekken van optische vezels.
De torsie-instelling moet op elk moment worden aangepast aan de verandering van de wikkelradius, om ervoor te zorgen dat de spanning van de materialen niet verandert met de verandering van de wikkelradius.
In de positiebesturingsmodus wordt de rotatiesnelheid doorgaans bepaald door de frequentie van de externe ingangspulsen en wordt de rotatiehoek bepaald door het aantal pulsen.
Sommige servo's kunnen via communicatie rechtstreeks waarden toewijzen aan de snelheid en verplaatsing.
Omdat de positiemodus de snelheid en positie strikt kan regelen, wordt deze over het algemeen gebruikt in positioneerapparaten, CNC-machine gereedschap, drukmachines enzovoort.
De rotatiesnelheid kan worden geregeld via de invoer van een analoge hoeveelheid of pulsfrequentie.
Als er sprake is van PID-besturing in de buitenste regelkring van het bovenste regelapparaat, kan de snelheidsmodus ook worden gepositioneerd, maar moet het positiesignaal van de motor of het positiesignaal van de directe belasting voor de werking worden teruggestuurd naar de bovenste computer.
De positiemodus ondersteunt ook de buitenring met directe belasting om het positiesignaal te detecteren.
Op dit moment detecteert de encoder aan het uiteinde van de motoras alleen de motorsnelheid en wordt het positiesignaal geleverd door het directe detectieapparaat aan het uiteinde van de eindbelasting.
Dit heeft het voordeel dat het de fout in het tussentijdse transmissieproces kan verminderen en de positioneringsnauwkeurigheid van het hele systeem kan verhogen.
Servo wordt over het algemeen geregeld door drie regelkringen. De zogenaamde drie lussen zijn drie gesloten-lus negatieve terugkoppeling PID-regelsystemen.
De binnenste PID-lus is de stroomlusdie volledig wordt uitgevoerd binnen de servoaandrijving.
De uitgangsstroom van elke fase van de driver naar de motor wordt gedetecteerd via het hall-apparaat en de negatieve terugkoppeling wordt ingesteld op de stroom voor PID-aanpassing, zodat de uitgangsstroom zo dicht mogelijk bij de ingestelde stroom ligt.
De stroomlus regelt het motorkoppel, dus de berekening van de driver is het kleinst in de koppelmodus en heeft de snelste dynamische respons.
De tweede lus is de snelheidslus.
De PID-aanpassing met negatieve terugkoppeling wordt uitgevoerd via het gedetecteerde signaal van de motorencoder.
De PID-uitgang in de lus is direct de instelling van de stroomlus. Daarom omvat de snelheidslusregeling de snelheidslus en de stroomlus.
Met andere woorden, de stroomlus moet worden gebruikt voor elke modus en de stroomlus is de basis van de regeling.
Tegelijkertijd met de snelheids- en positieregeling regelt het systeem in feite de stroom (koppel) om de corresponderende regeling van snelheid en positie te bereiken.
De derde lus is de positielus, die de buitenste lus is.
Het kan worden gebouwd tussen de driver en de motorencoder of tussen de externe controller en de motorencoder of de eindbelasting, afhankelijk van de feitelijke situatie.
Aangezien de interne uitgang van de positiecontrolelus de instelling van de snelheidslus is, voert het systeem de werking van alle drie de lussen uit in de positiebesturingsmodus.
Op dit moment heeft het systeem de grootste werking en de traagste dynamische reactiesnelheid.

Als oprichter van MachineMFG heb ik meer dan tien jaar van mijn carrière gewijd aan de metaalbewerkingsindustrie. Door mijn uitgebreide ervaring ben ik een expert geworden op het gebied van plaatbewerking, verspaning, werktuigbouwkunde en gereedschapsmachines voor metalen. Ik denk, lees en schrijf voortdurend over deze onderwerpen en streef er voortdurend naar om voorop te blijven lopen in mijn vakgebied. Laat mijn kennis en expertise een aanwinst zijn voor uw bedrijf.