Hoe werken elektrische motoren? Een uitgebreide gids
Hoe zetten elektromotoren elektriciteit om in beweging? Stel je een wereld voor waarin bijna de helft van onze energie door deze motoren wordt aangedreven. Dit artikel duikt in de wetenschap achter elektromotoren en legt uit hoe ze magnetische velden en stroom gebruiken om roterende of lineaire beweging te produceren. Door de verschillende types, zoals DC- en AC-motoren, en hun interne mechanismen te begrijpen, krijg je inzicht in hun cruciale rol in de moderne technologie. Klaar om de mysteries van deze alomtegenwoordige apparaten te ontrafelen? Lees verder om de principes en toepassingen van elektromotoren te ontdekken.
Bijna de helft van het wereldwijde energieverbruik wordt toegeschreven aan elektromotoren, dus het verbeteren van hun efficiëntie wordt beschouwd als de meest effectieve maatregel om wereldwijde energieproblemen aan te pakken.
Soorten motoren
Over het algemeen zetten motoren de kracht die wordt opgewekt door de stroom in een magnetisch veld om in roterende beweging, maar over het algemeen omvat dit ook lineaire beweging.
Op basis van het type krachtbron dat de motor aandrijft, kunnen ze worden ingedeeld in gelijkstroommotoren en wisselstroommotoren.
Verder kunnen ze volgens het rotatieprincipe van de motor grofweg worden onderverdeeld in de volgende categorieën, met uitzondering van speciale motoren.
1. Gelijkstroommotoren
(1) Borstelmotoren
De veelgebruikte borstelmotoren worden over het algemeen gelijkstroommotoren genoemd. Ze draaien door achtereenvolgens contact te maken met de elektroden die "borstels" worden genoemd (aan de statorzijde) en de "commutator" (aan de ankerzijde) om de stroom te schakelen.
(2) Borstelloze gelijkstroommotoren
Borstelloze gelijkstroommotoren hebben geen borstels en commutators nodig. Ze gebruiken schakelfuncties zoals transistors om de stroom te schakelen en een roterende beweging te maken.
(3) stappenmotoren
Deze motor werkt synchroon met pulsvermogen en wordt daarom ook wel pulsmotor genoemd. Het kenmerk is de mogelijkheid om gemakkelijk een nauwkeurige positionering te bereiken.
2. AC-motoren (wisselstroom)
(1) Asynchrone motoren
Wisselstroom genereert een roterend magnetisch veld in de stator, waardoor de rotor stroom induceert en onder zijn interactie roteert.
(2) Synchrone motoren
Wisselstroom creëert een roterend magnetisch veld en de rotor met magnetische polen roteert door aantrekkingskracht. De rotatiesnelheid wordt gesynchroniseerd met de netfrequentie.
Stappenmotor
Geborstelde gelijkstroommotor
Borstelloze gelijkstroommotor
Stroom, magnetische velden en kracht
Laten we eerst, om de volgende uitleg over motorische principes te vergemakkelijken, de basiswetten/regels met betrekking tot stroom, magnetische velden en kracht nog eens doornemen.
Hoewel het een gevoel van nostalgie kan oproepen, kan deze kennis gemakkelijk worden vergeten als magnetische onderdelen niet regelmatig worden gebruikt.
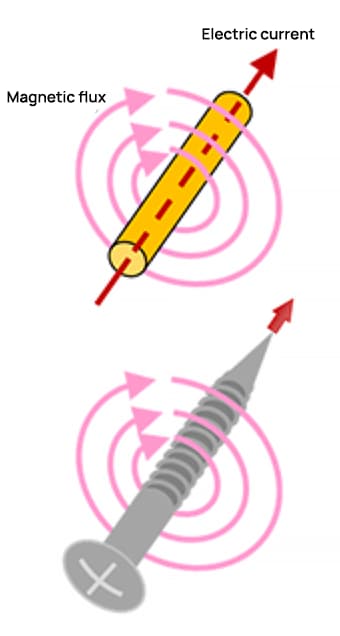
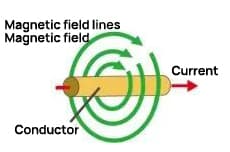
Wet van Ampere (rechterhandschroefregel)
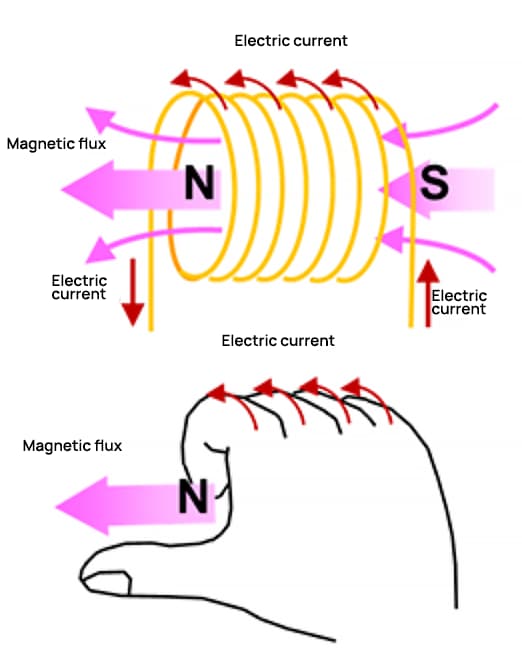
De magnetische flux die wordt opgewekt door een stroom in een spoel
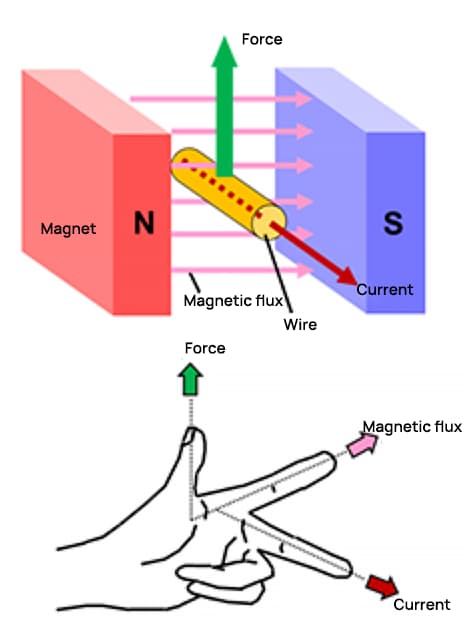
Gebaseerd op de linkerhandregel van Fleming
We zullen dit illustreren met afbeeldingen en vergelijkingen.
Schematisch diagram van motoromwenteling
Wanneer het draadframe rechthoekig is, moet rekening worden gehouden met de kracht die op de stroom werkt. De kracht F die wordt uitgeoefend op de delen a en c van het frame is:
Het koppel wordt opgewekt rond de centrale as. Als we bijvoorbeeld kijken naar een toestand waarin de draaihoek slechts θ is, dan is de kracht die loodrecht op b en d staat sinθ. Bijgevolg wordt het koppel Ta in deel a weergegeven met de volgende formule:
Als we deel C op dezelfde manier bekijken, wordt het koppel verdubbeld, waardoor een koppel wordt gegenereerd dat met de volgende formule wordt berekend:
Gegeven dat de oppervlakte van een rechthoek S = h*l is, kan het volgende resultaat worden afgeleid door het in te voegen in de eerder genoemde formule:
Deze formule is niet alleen van toepassing op rechthoeken, maar ook op andere veel voorkomende vormen zoals cirkels. Dit principe ligt ten grondslag aan de werking van elektromotoren.
Hoe draait een motor?
1) Motoren draaien door gebruik te maken van magneten en magnetische kracht.
Rond een permanente magneet met een draaiende as:
① Draai de magneet (om een roterend magnetisch veld op te wekken).
Dit volgt het principe dat tegenovergestelde polen (N en S) elkaar aantrekken, terwijl gelijke polen elkaar afstoten.
③ De magneet met de draaiende as draait dan rond.
Dit is het basisprincipe van motorrotatie.
De stroom die door de geleider loopt, genereert een roterend magnetisch veld eromheen, waardoor de magneet gaat draaien, wat in wezen dezelfde bewegingstoestand vertegenwoordigt.
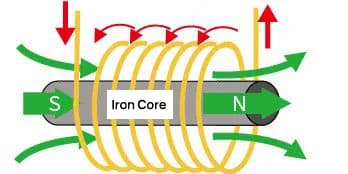
Bovendien, wanneer een geleider in een spoel wordt gewikkeld, vormen de magnetische krachten samen een grote magnetische flux, waardoor een noord- en zuidpool ontstaan.
Door een ferro-kern in de opgerolde geleider te plaatsen, kunnen de magnetische veldlijnen gemakkelijker passeren, waardoor een sterkere magnetische kracht wordt gegenereerd.
2) Operationele roterende motoren
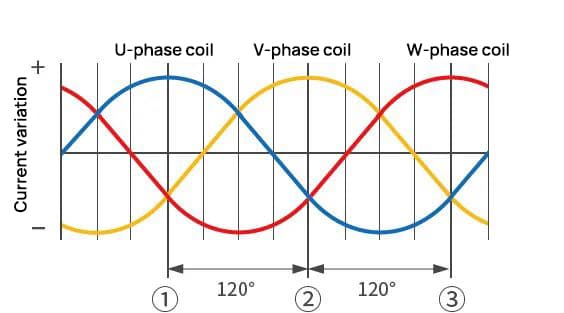
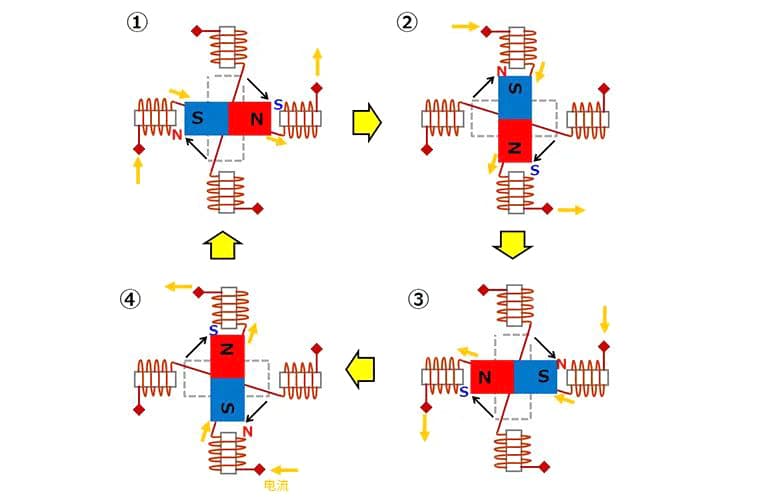
In deze context presenteren we een praktische benadering voor roterende motoren, waarbij we het gebruik demonstreren van driefasige wisselstroom en spoelen om een roterend magnetisch veld op te wekken. (Driefasige wisselstroom verwijst naar wisselsignalen die gefaseerd zijn met intervallen van 120°).
Het gesynthetiseerde magnetische veld in de bovengenoemde toestand ① komt overeen met onderstaande figuur ①.
Het gesynthetiseerde magnetische veld in de eerder genoemde toestand ② komt overeen met Figuur ② hieronder.
Het gesynthetiseerde magnetische veld in verband met de hierboven genoemde toestand ③ wordt weergegeven in onderstaande figuur ③.
Zoals hierboven vermeld, is de spoel die om de ijzeren kern gewikkeld is, verdeeld in drie fasen: U-fase spoel, V-fase spoel en W-fase spoel, gerangschikt met een interval van 120°. De spoel met een hogere spanning genereert een noordpool, terwijl de spoel met een lagere spanning een zuidpool genereert.
Elke fase varieert volgens de sinusgolf, daarom zullen de polariteit (noord- of zuidpool) en het magnetische veld (de magnetische kracht) dat door elke spoel wordt gegenereerd, veranderen.
Op dit punt, als we alleen de spoel beschouwen die de noordpool genereert, gaat de opeenvolging van veranderingen van U-fasespoel naar V-fasespoel, dan naar W-fasespoel en ten slotte terug naar U-fasespoel, waardoor een rotatie ontstaat.
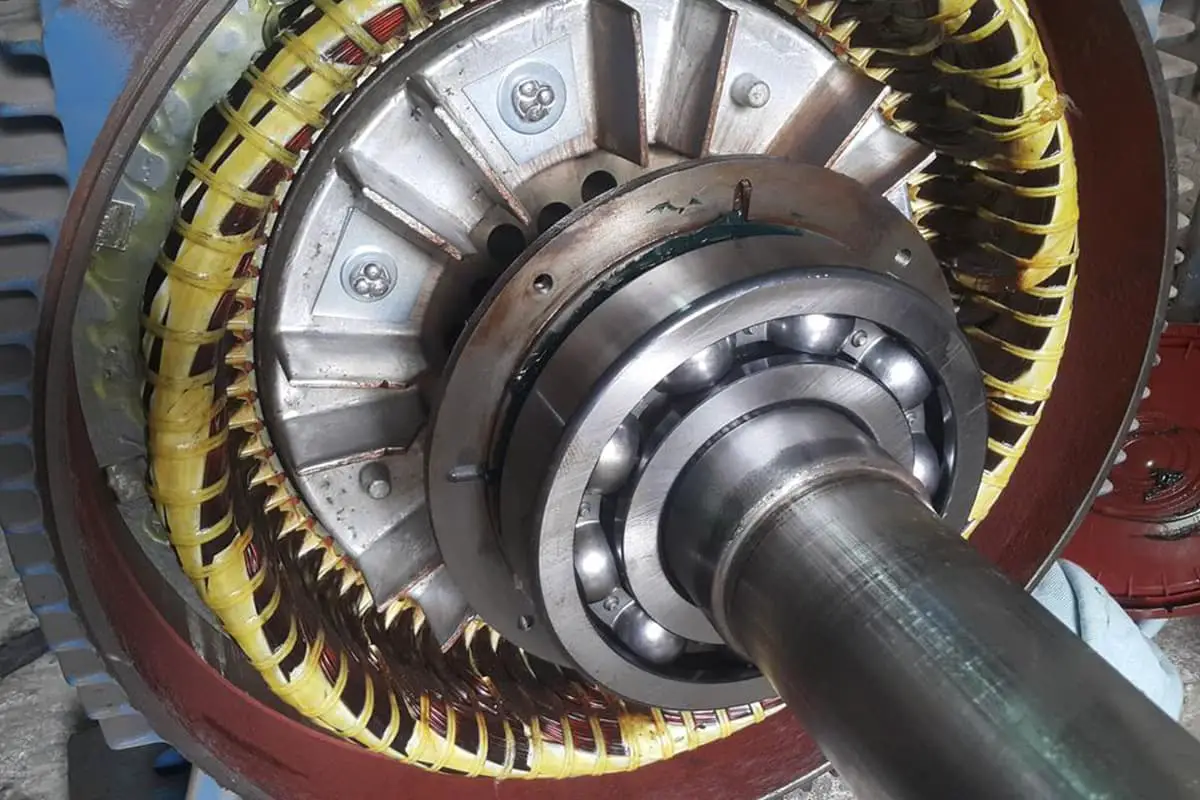
Structuur van kleine motoren
De onderstaande figuur geeft een algemene opbouw en vergelijking van drie soorten motoren: stappenmotoren, borstelgelijkstroommotoren (DC-motoren) en borstelloze gelijkstroommotoren (DC-motoren).
De basiscomponenten van deze motoren zijn voornamelijk spoelen, magneten en rotors. Vanwege hun verschillende types worden ze verder ingedeeld in spoelvaste en magneetvaste types.
Stappenmotor
Geborstelde gelijkstroommotor
Borstelloze gelijkstroommotor
Hieronder volgt een structurele beschrijving met betrekking tot het voorbeelddiagram. Houd er rekening mee dat dit document de structuur introduceert binnen een breed kader, aangezien er andere structuren kunnen zijn als deze gedetailleerder worden onderverdeeld.
De spoelen van de stappenmotor zitten hier vast aan de buitenkant en de magneten draaien aan de binnenkant; de magneten van de geborstelde gelijkstroommotor zitten vast aan de buitenkant en de spoelen draaien aan de binnenkant.
De stroomtoevoer naar de spoelen en de verandering in de richting van de stroom worden geregeld door borstels en commutators; bij borstelloze motoren zijn de spoelen aan de buitenkant gefixeerd, terwijl de magneten aan de binnenkant draaien.
Door variaties in motortypen kan de structuur, zelfs met dezelfde basiscomponenten, verschillen. Specifieke details worden in elk hoofdstuk uitgelegd.
Geborstelde motor
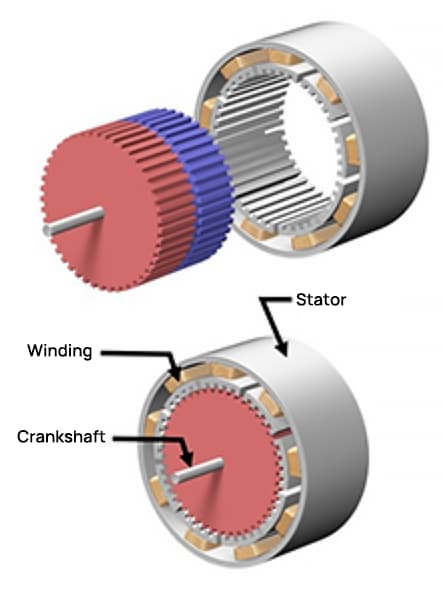
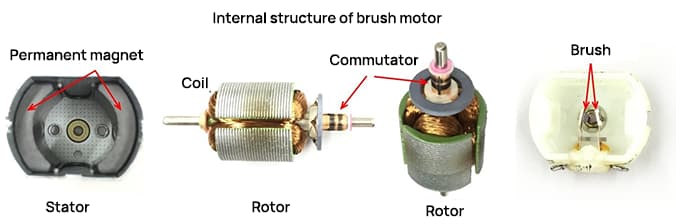
Structuur van borstelmotor
De afbeelding hieronder toont de buitenkant van een geborstelde gelijkstroommotor die vaak in modellen wordt gebruikt, evenals een opengewerkte tekening van een typische tweepolige (twee magneten) en driesleufmotor (drie spoelen). Velen hebben ervaring met het demonteren van motoren en het verwijderen van magneten.
In een geborstelde gelijkstroommotor staan de permanente magneten stil terwijl de spoelen rond het interne centrum kunnen draaien. De stationaire zijde staat bekend als de "stator" en de roterende zijde wordt de "rotor" genoemd.
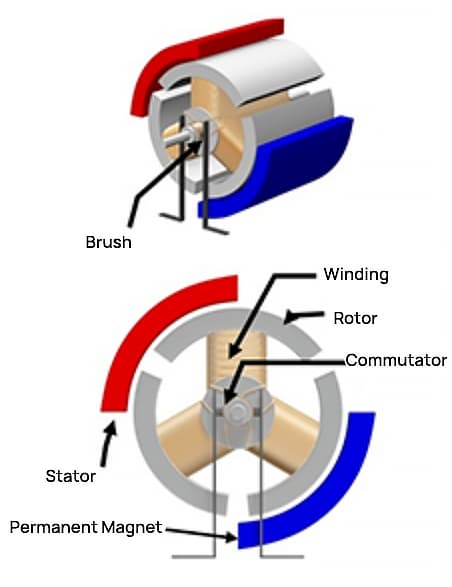
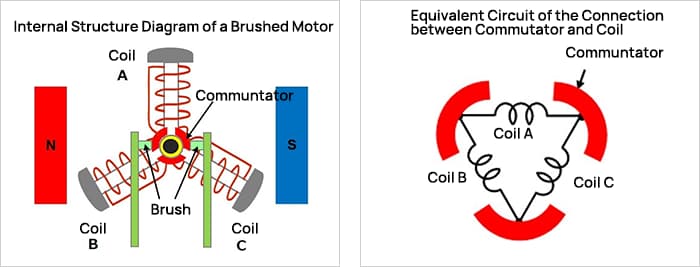
Hier is een schematisch diagram dat de structurele concepten illustreert.
De centrale rotatieas is omgeven door drie commutators - gebogen metalen platen die worden gebruikt voor het schakelen van elektrische stroom. Om contact met elkaar te voorkomen, zijn de commutators 120° uit elkaar geplaatst (360° ÷ 3 eenheden). Deze commutators draaien met de as mee.
Elke commutator is verbonden met een uiteinde van een spoel en een ander uiteinde, en samen vormen de drie commutators en drie spoelen een compleet circuitnetwerk (ring).
Twee borstels zijn vastgezet op 0° en 180° om contact te maken met de commutators. Een externe gelijkstroombron wordt aangesloten op de borstels en de stroom vloeit langs het pad van borstel naar commutator, van commutator naar spoel en van spoel terug naar de borstel.
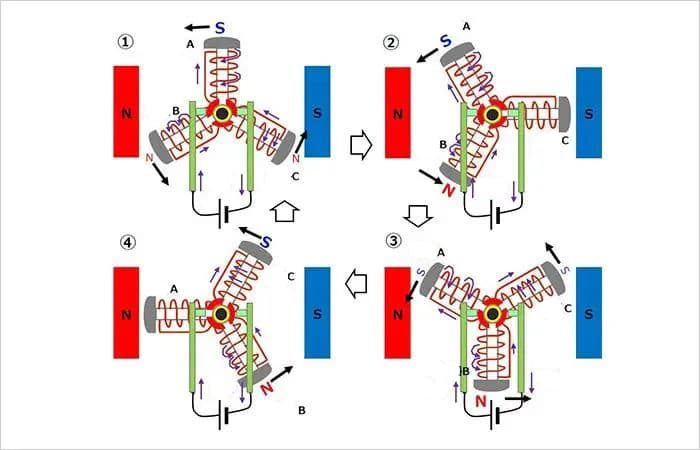
Dit is het rotatieprincipe van een borstelmotor.
① Rotatie linksom vanuit de begintoestand
Spoel A bevindt zich bovenaan, met de stroombron aangesloten op de borstels, waarbij de linkerkant is aangeduid als (+) en de rechterkant als (-). Er loopt een hoge stroom van de linker borstel door de commutator naar spoel A. Hierdoor wordt het bovenste (buitenste) deel van spoel A een zuidpool (S).
Omdat de helft van de stroom van spoel A van de linker borstel naar spoelen B en C stroomt in de tegenovergestelde richting van spoel A, worden de buitenkanten van spoelen B en C zwakke noordpolen (N), aangegeven met kleinere letters in het diagram.
De magnetische velden die in deze spoelen worden gegenereerd, zorgen samen met de afstoting en aantrekking van de magneten voor een kracht die de spoelen tegen de klok in laat draaien.
② Verder linksom draaien
Vervolgens, ervan uitgaande dat spoel A 30° linksom gedraaid is, maakt de rechterborstel contact met de twee commutators.
De stroom in spoel A blijft van de linker borstel over de rechter borstel lopen, en de buitenkant van de spoel blijft een zuidpool. Dezelfde stroom vloeit door spoel B, waardoor de buitenkant een sterkere noordpool wordt. Spoel C is kortgesloten door de borstels aan beide uiteinden, dus er loopt geen stroom en er wordt geen magnetisch veld opgewekt.
Zelfs in deze toestand wordt er een tegen de klok in draaiende kracht uitgeoefend. Van ③ tot ④ wordt de bovenste spoel nog steeds linksom aangedreven en de onderste spoel nog steeds rechtsom, wat resulteert in een voortdurende rotatie tegen de klok in.
Elke 30° rotatie van de spoel naar de toestanden ③ en ④, als de spoel boven de centrale horizontale as is, wordt de buitenkant een zuidpool; als hij eronder is, wordt hij een noordpool, en deze beweging herhaalt zich.
Met andere woorden, de bovenste spoel ondervindt herhaaldelijk een kracht naar links en de onderste spoel een kracht naar rechts (beide in tegenwijzerzin). Hierdoor blijft de rotor tegen de klok in draaien.
Als de stroombron wordt aangesloten op de tegenoverliggende linkerborstel (-) en rechterborstel (+), wordt er een omgekeerd magnetisch veld gegenereerd in de spoel, waardoor de richting van de kracht die op de spoel wordt uitgeoefend, wordt omgekeerd en deze rechtsom draait.
Als de stroombron wordt losgekoppeld, stopt de rotor van de borstelmotor bovendien met draaien door de afwezigheid van het magnetische veld dat de rotatie aandreef.
Driefasige borstelloze motor met volledige golving
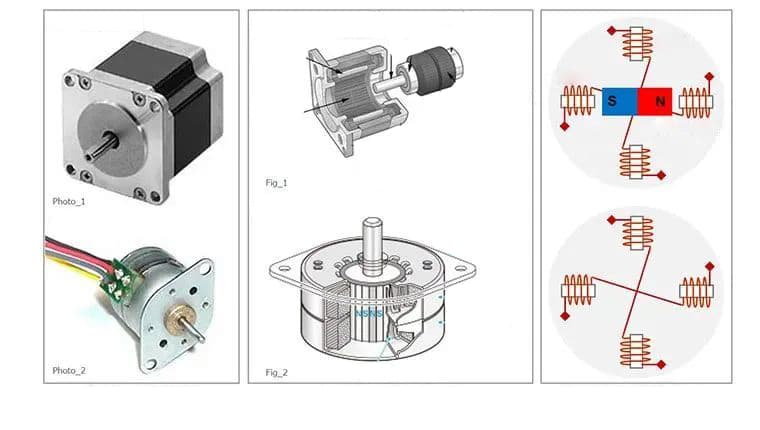
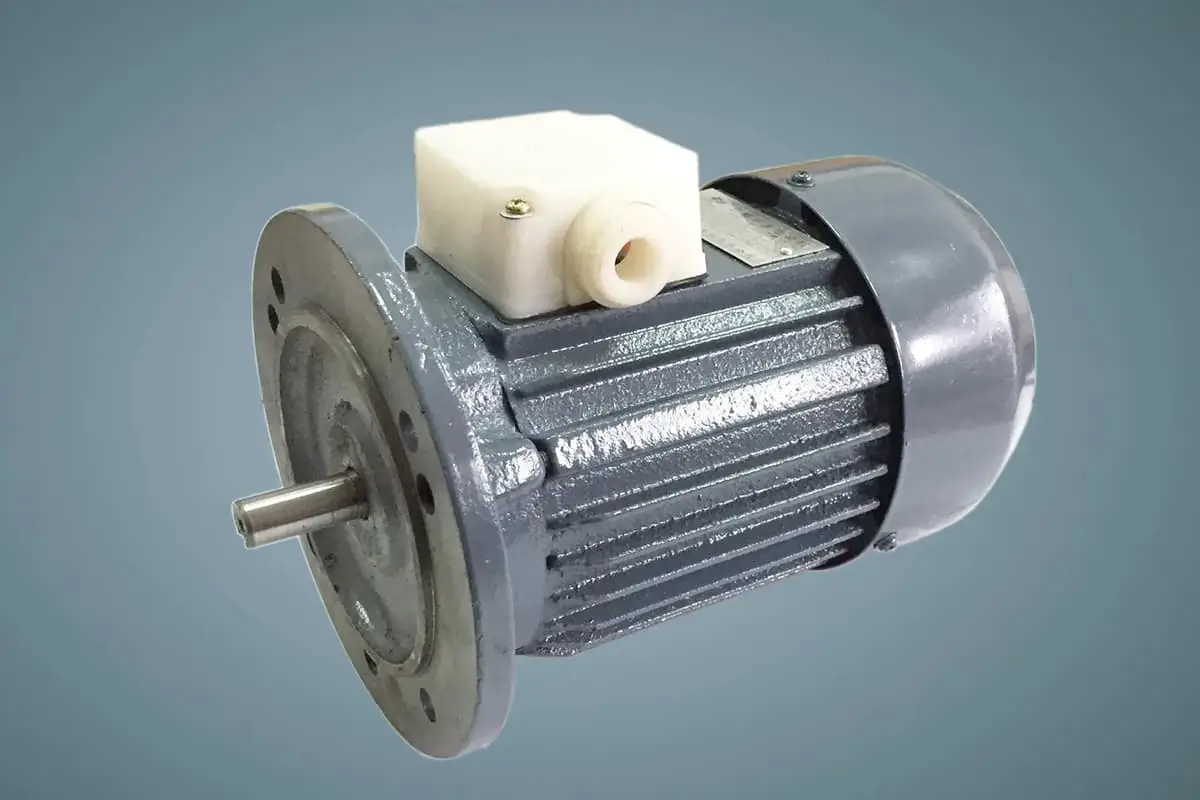
Uiterlijk en structuur van de driefasen borstelloze motor met volle golf
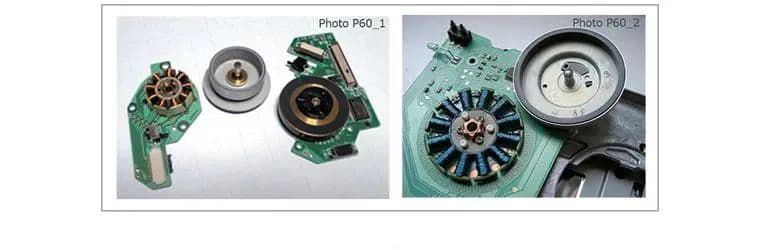
De afbeelding hieronder toont een voorbeeld van het uiterlijk en de structuur van de borstelloze motor.
Voorbeeld van uiterlijk en structuur van borstelloze motor
De linkerkant toont een voorbeeld van de hoofdspilmotor die wordt gebruikt om de schijf in het schijfafspeelapparaat te laten draaien en die in totaal negen spoelen bevat, drie fasen maal drie.
Rechts zie je een voorbeeld van de hoofdspilmotor van een FDD-apparaat, met twaalf spoelen (drie fasen maal vier). De spoelen zijn gemonteerd op een printplaat en gewikkeld rond een ijzeren kern.
Aan de rechterkant van de spoel is de schijfvormige component een rotor met permanente magneet. De omtrek is een permanente magneet, de as van de rotor is in het midden van de spoel gestoken en bedekt een deel van de spoel, waarbij de permanente magneet de omtrek van de spoel omgeeft.
Inwendig structuurschema en equivalent circuit van driefasen borstelloze motor met volle golf
Hierna volgen het vereenvoudigde interne structuurdiagram en het equivalente schakelschema van de spoelaansluitingen voor een driefasen borstelloze motor met volle golf.
Dit schema geeft een eenvoudige structuur weer van een 2-polige (2 magneten) 3-sleuven (3 spoelen) motor. Het lijkt op de structuur van een borstelmotor met een gelijk aantal polen en sleuven, behalve dat de spoelzijde stationair is en de magneten draaibaar. Natuurlijk bevat dit ontwerp geen borstels.
In deze configuratie zijn de spoelen verbonden in een Y-vorm. Halfgeleidercomponenten leveren stroom aan de spoelen en regelen de in- en uitstroom van stroom op basis van de positie van de roterende magneten.
In dit voorbeeld wordt een Hall-element gebruikt om de positie van de magneten te detecteren. Het Hall-element wordt tussen de spoelen geplaatst, waar het de spanning detecteert die wordt opgewekt door de magnetische veldsterkte en deze gebruikt voor positie-informatie.
In de eerder geleverde afbeelding van de FDD spindelmotor is ook een Hall-element (boven de spoelen) te zien, dat dient om de positie tussen de spoelen te detecteren.
Het Hall-element is een bekende magnetische sensor. Het kan de grootte van een magnetisch veld omzetten in een spanning, die de richting van het veld weergeeft met positieve of negatieve waarden. Hieronder staat een diagram dat het Hall-effect illustreert.
Het Hall-element maakt gebruik van het fenomeen dat "wanneer de stroom IH door de halfgeleider stroomt en de magnetische flux B onder een rechte hoek ten opzichte van de stroom doorloopt, er een spanning VH wordt opgewekt in de richting loodrecht op de stroom en het magnetische veld".
Dit fenomeen, dat bekend staat als het "Hall-effect", werd ontdekt door de Amerikaanse natuurkundige Edwin Herbert Hall. De opgewekte spanning VH wordt weergegeven door de volgende formule.
VH=(KH/d)・IH・B
Waarbij KH de Hall-coëfficiënt is en d de dikte van het fluxdoorlatende oppervlak.
Zoals de formule suggereert, hoe groter de stroom, hoe hoger de spanning. Deze eigenschap wordt vaak gebruikt om de positie van de rotor (magneet) te detecteren.
Rotatieprincipe van driefasen borstelloze motor met volle golf
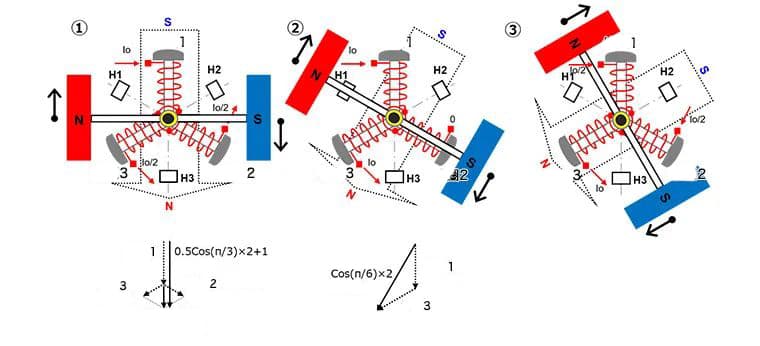
Het rotatieprincipe van de borstelloze motor wordt uitgelegd in stappen ① tot ⑥. Voor een beter begrip is de permanente magneet vereenvoudigd van een cirkel naar een rechthoek.
1) Stel je in een driefasig spoelsysteem voor dat spoel 1 vastzit op de 12-uurspositie van een klok, spoel 2 op 4 uur en spoel 3 op 8 uur. Veronderstel een 2-polige permanente magneet met de noordpool links en de zuidpool rechts, die kan roteren.
Stroom Io wordt ingevoerd in spoel 1, waardoor een zuidpool magnetisch veld aan de buitenkant van de spoel ontstaat. De helft van deze stroom, Io/2, stroomt uit spoel 2 en 3, waardoor een noordpoolmagnetisch veld aan de buitenkant van de spoel ontstaat.
Wanneer de magnetische velden van spoel 2 en 3 een vectorsynthese ondergaan, wordt een neerwaarts noordpoolmagnetisch veld opgewekt. Dit veld is half zo groot als het magnetische veld dat wordt opgewekt wanneer stroom Io door één spoel loopt en wordt, opgeteld bij het veld van spoel 1, 1,5 keer zo groot. Hierdoor ontstaat een synthetisch magnetisch veld onder een hoek van 90° ten opzichte van de permanente magneet, waardoor een maximaal koppel wordt opgewekt en de permanente magneet met de wijzers van de klok mee gaat draaien.
Als de stroom in spoel 2 afneemt en die in spoel 3 toeneemt op basis van de rotatiepositie, draait het samengestelde magnetische veld ook rechtsom, waardoor de rotatie van de permanente magneet wordt voortgezet.
2) Met een draaiing van 30° gaat stroom Io spoel 1 binnen, waardoor de stroom in spoel 2 op nul wordt gezet en stroom Io uit spoel 3 stroomt.
De buitenkant van spoel 1 wordt de S-pool en de buitenkant van spoel 3 wordt de N-pool. Tijdens de vectorcombinatie is het opgewekte magnetische veld √3 (ongeveer 1,72) keer dat van een enkele spoel met stroom Io. Dit resulteert ook in een samengesteld magnetisch veld onder een hoek van 90° met het veld van de permanente magneet, dat met de klok mee draait.
Wanneer de instroomstroom Io in spoel 1 wordt verlaagd overeenkomstig de rotatiepositie, begint de instroomstroom in spoel 2 te stijgen vanaf nul en neemt de uitstroomstroom in spoel 3 toe tot Io, draait het samengestelde magnetische veld ook met de wijzers van de klok mee en blijft de permanente magneet draaien.
Ervan uitgaande dat alle fasestromen sinusvormig zijn, is de stroom hier Io×sin(π⁄3)=Io×√3⁄2. Door de vectorcombinatie van het magnetische veld is de totale magnetische veldgrootte 1,5 keer het veld dat door een enkele spoel wordt geproduceerd ((√3⁄2)2×2=1,5). Wanneer alle fasestromen sinusoïdaal zijn, ongeacht de positie van de permanente magneet, is de grootte van het vectorcompositief magnetisch veld altijd 1,5 keer dat van een enkele spoel en vormt het magnetisch veld een hoek van 90° met het magnetisch veld van de permanente magneet.
3) Bij een volgende rotatie van 30° stroomt stroom Io/2 in spoel 1, stroom Io/2 in spoel 2 en stroom Io uit spoel 3.
De buitenkant van spoel 1 wordt de S-pool, de buitenkant van spoel 2 wordt ook de S-pool en de buitenkant van spoel 3 wordt de N-pool. Tijdens de vectorcombinatie is het opgewekte magnetische veld 1,5 keer het magnetische veld dat wordt opgewekt wanneer stroom Io door een enkele spoel gaat (hetzelfde als in ①). Hier wordt ook een samengesteld magnetisch veld gevormd onder een hoek van 90° ten opzichte van het veld van de permanente magneet, draaiend met de klok mee.
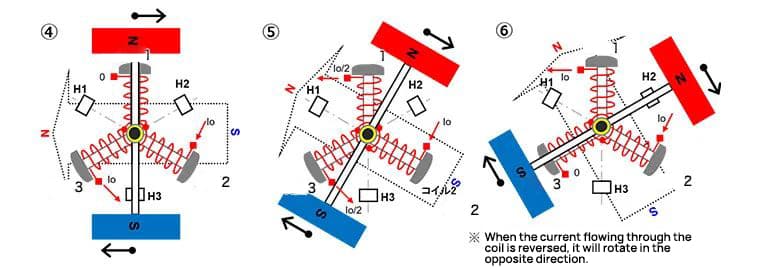
Stap 4 tot en met 6 draaien op dezelfde manier als stap 1 tot en met 3.
Op deze manier, door de stroom die in de spoel vloeit sequentieel te schakelen volgens de positie van de permanente magneet, zal de permanente magneet in een vaste richting draaien. Op dezelfde manier zal de permanente magneet linksom draaien als de stroom wordt omgekeerd en de richting van het synthetische magnetische veld wordt omgekeerd.
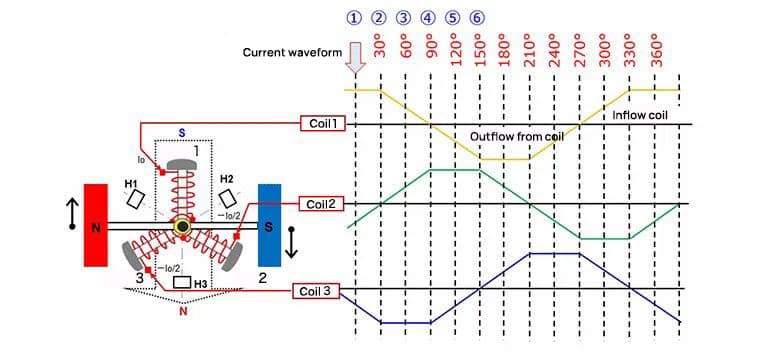
Het onderstaande diagram toont continu de stroom voor elke spoel in elk van de bovengenoemde stappen 1 tot en met 6. Uit de bovenstaande inleiding moet de relatie tussen de veranderingen in stroom en rotatie duidelijk worden.
Stappenmotor
De stappenmotor is een type motor die nauwkeurig kan synchroniseren met pulssignalen om de rotatiehoek en snelheid te regelen. Het wordt ook wel een "pulsmotor" genoemd.
De stappenmotor, die geen positiesensor nodig heeft en een nauwkeurige positionering kan bereiken via open-loopregeling, wordt veel gebruikt in apparatuur die een nauwkeurige locatie vereist.
Structuur van een stappenmotor (tweefasig bipolair)
De afbeeldingen hieronder tonen van links naar rechts een voorbeeld van het uiterlijk van een stappenmotor, een eenvoudig diagram van de interne structuur en een conceptueel schema van het ontwerp.
De buitenvoorbeelden zijn van stappenmotoren van het type HB (hybride) en PM (permanente magneet). De middelste diagrammen tonen ook de structuren van HB- en PM-types.
Stappenmotoren hebben een structuur met vaste spoelen en een roterende magneet. Het conceptuele diagram aan de rechterkant van de interne structuur van de stappenmotor illustreert een voorbeeld van een PM-motor met twee fasen (twee sets) spoelen. In de basisstructuurvoorbeelden van stappenmotoren zijn de spoelen extern geplaatst en bevindt de permanente magneet zich intern. Naast tweefasen zijn er ook typen met een hoger aantal fasen, zoals driefasen en vijffasen.
Sommige stappenmotoren hebben verschillende structuren, maar om hun werkingsprincipes uit te leggen, geeft dit artikel de basisstructuur van stappenmotoren. Het is de bedoeling van dit artikel te begrijpen dat stappenmotoren voornamelijk een structuur hebben met vaste spoelen en een roterende permanente magneet.
Basisprincipe van stappenmotoren (enkelfasige bekrachtiging)
Het volgende diagram wordt gebruikt om het basisprincipe van stappenmotoren uit te leggen. Dit is een eenfasig (één set spoelen) bekrachtigingsvoorbeeld van de bovengenoemde tweefasige bipolaire spoelen. Het uitgangspunt van het diagram is de toestandsverandering van ① naar ④. De spoelen bestaan uit spoel 1 en spoel 2. Bovendien geeft de stroompijl de stroomrichting aan.
Leid de stroom vanaf de linkerkant van spoel 1 naar binnen en vanaf de rechterkant naar buiten. Voorkom dat er stroom door spoel 2 loopt. Hierdoor wordt de binnenkant van de linker spoel 1 N (noord), terwijl de binnenkant van de rechter spoel 1 S (zuid) wordt. Bijgevolg wordt de permanente magneet in het midden aangetrokken door het magnetische veld van spoel 1, neemt een toestand aan met S aan de linkerkant en N aan de rechterkant en stopt.
Vervolgens zet je de stroom in spoel 1 stil en laat je hem vanaf de bovenkant van spoel 2 naar binnen stromen en vanaf de onderkant naar buiten. De binnenkant van de bovenste spoel 2 wordt dan N, en de binnenkant van de onderste spoel 2 wordt S. De permanente magneet wordt aangetrokken door dit magnetische veld, draait 90 graden met de klok mee en stopt.
③ Stop daarna de stroom in spoel 2 en stuur de stroom vanaf de rechterkant van spoel 1 naar binnen en vanaf de linkerkant naar buiten. De binnenkant van de linker spoel 1 wordt S en de binnenkant van de rechter spoel 1 wordt N. De permanente magneet wordt weer aangetrokken door dit veld, draait nog eens 90 graden rechtsom en stopt.
Tenslotte stopt u de stroom in spoel 1 en leidt u deze naar binnen vanaf de onderkant van spoel 2 en naar buiten vanaf de bovenkant. De binnenkant van de bovenste spoel 2 wordt S, terwijl de binnenkant van de onderste spoel 2 N wordt. Opnieuw wordt de permanente magneet aangetrokken door dit magnetische veld, draait 90 graden met de klok mee en stopt.
Door de stroom door de spoelen in bovenstaande volgorde (① tot ④) via een elektronisch circuit te schakelen, kan de stappenmotor gaan draaien. In dit voorbeeld roteert elke schakelhandeling de stappenmotor 90 graden.
Bovendien zorgt het handhaven van een continue stroom door een specifieke spoel ervoor dat de motor in de stilstandtoestand blijft met behoud van koppel. Als kanttekening kan het omkeren van de volgorde van de stroom door de spoelen ervoor zorgen dat de stappenmotor in de tegenovergestelde richting draait.
Als oprichter van MachineMFG heb ik meer dan tien jaar van mijn carrière gewijd aan de metaalbewerkingsindustrie. Door mijn uitgebreide ervaring ben ik een expert geworden op het gebied van plaatbewerking, verspaning, werktuigbouwkunde en gereedschapsmachines voor metalen. Ik denk, lees en schrijf voortdurend over deze onderwerpen en streef er voortdurend naar om voorop te blijven lopen in mijn vakgebied. Laat mijn kennis en expertise een aanwinst zijn voor uw bedrijf.
Heb je je ooit afgevraagd wat ervoor zorgt dat een elektromotor soepel blijft draaien zonder oververhit te raken? Inzicht in de veilige bedrijfstemperaturen voor motoren is cruciaal voor hun levensduur en prestaties. In dit artikel...
Heb je je ooit afgevraagd hoe treinen boven de rails kunnen zweven of hoe robots precieze bewegingen kunnen maken? Dit artikel onthult de fascinerende wereld van lineaire motoren en legt hun principes, typen en unieke voordelen uit....
Heb je je ooit afgevraagd waarom je elektromotor soms moeite heeft om soepel te starten? Hoge startstromen kunnen je elektrische systeem behoorlijk belasten, wat kan leiden tot storingen en inefficiëntie. Dit artikel...
Hoe bepaal je het maximale trillingsniveau voor elektromotorlagers? Deze cruciale vraag heeft betrekking op zowel operationele limieten als testen na installatie. Het artikel onderzoekt internationale en nationale normen...
Een paar dagen geleden stelde een ingenieur een vraag over de selectie van smeermiddelen voor lagers. De fabrikanten van smeermiddelen hadden een overvloed aan prestatie-indicatoren gegeven, maar de betekenis achter deze parameters...
Het kiezen van de juiste lagers voor verticale motoren brengt unieke uitdagingen met zich mee vanwege de structurele verschillen met horizontale motoren. Het selectieproces moet rekening houden met axiale en radiale belastingen, smeringsproblemen...
1. Het onderscheid tussen elektrische duwstang en elektrische cilinder Elektrische duwstang en elektrische cilinder worden over het algemeen elektrische actuators genoemd. Ze gebruiken een elektromotor om...
Heb je je ooit afgevraagd wat de elektrische systemen in je huis veilig en betrouwbaar houdt? Elektrische laagspanningsapparaten, zoals stroomonderbrekers en schakelaars, spelen hierbij een cruciale rol. Dit artikel...
Heb je je ooit afgevraagd wat gelijkstroommotoren onderscheidt van wisselstroommotoren? In dit artikel verkennen we de fundamentele verschillen tussen deze twee soorten motoren, waaronder hun werkingsprincipes,...