De ultieme gids voor encoders: Soorten, toepassingen en voordelen
Heb je je ooit afgevraagd hoe machines precies hun positie en snelheid weten? Dit artikel verkent de fascinerende wereld van encoders, sensoren die cruciaal zijn voor het detecteren van mechanische beweging. Je leert over verschillende soorten encoders, hun werkingsprincipes en hun toepassingen in moderne machines. Bereid je voor op het ontdekken van de geheimen achter de precisie van motorbesturingen en meer!
Encoders zijn een type sensor die voornamelijk worden gebruikt om de snelheid, positie, hoek, afstand of het aantal mechanische bewegingen te detecteren.
Naast het gebruik in machines hebben veel motorbesturingen, zoals servomotoren, encoders nodig om de motorbesturing feedback te geven voor commutatie, snelheid en positiedetectie.
2. Classificatie van encoders
De encoder kan worden onderverdeeld in analoge encoder en digitale encoder. Analoge encoders kunnen verder worden onderverdeeld in roterende transformatoren en Sin/Cos-encoders, terwijl digitale encoders kunnen worden onderverdeeld in incrementele encoders en absolute encoders.
3. Werkingsprincipes van veelgebruikte encoders
3.1 Principe van digitale encoders
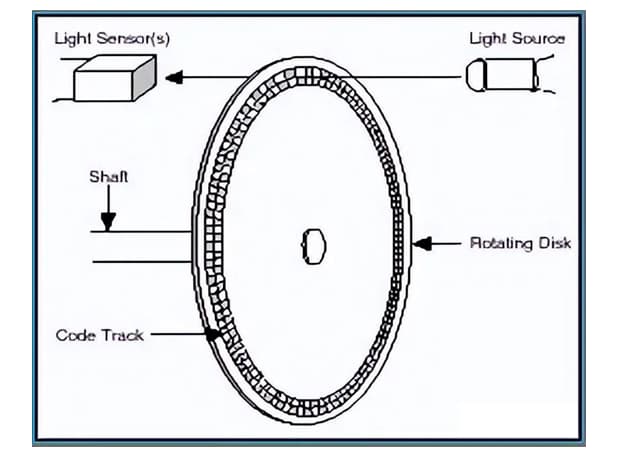
1) Gebruik foto-elektrische koppelingen om een gesegmenteerde schijf op een mechanische as te scannen.
De mechanische code wordt omgezet in proportionele elektrische pulssignalen.
De lichtbron (meestal een LED) zendt een smalle lichtstraal uit naar de ontvanger (die een fotodiode kan zijn). Zowel de lichtbron als de ontvanger zijn strikt geïnstalleerd in stationaire delen van het roterende verbindingslager.
De encoder is een schaduwschijf met een transparante opening of venster die in het roterende deel van het lager is geïnstalleerd.
3.2 Principe van foto-elektrische digitale encoders
Wanneer het lager draait, laat de encoder de lichtstraal door (door het kleine venstertje op de schijf).
De fotodiode geeft corresponderende hoge of lage signalen als de positie verandert. De uitgang van de fotodiode kan via een speciaal circuit worden omgezet in positie- en snelheidsinformatie.
3.2.1 Uitgang van incrementele encoders
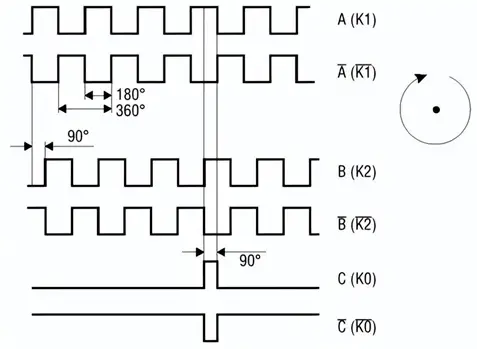
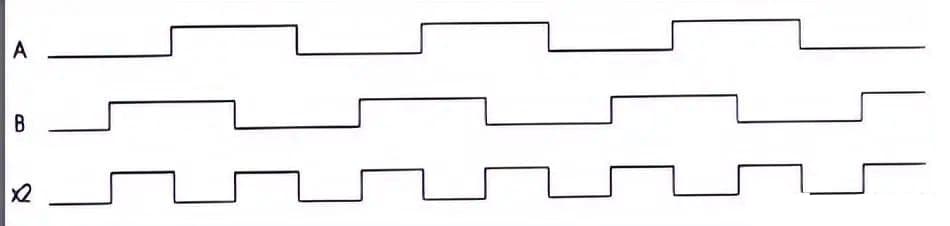
De incrementele encoderuitgang bestaat uit een in het midden geplaatste foto-elektrische schijf met cirkelvormige transparante en ondoorzichtige markeringen, die worden gelezen door foto-elektrische zender- en ontvangercomponenten om blokgolfsignalen te verkrijgen, gecombineerd als A, B, -A, -B.
Elk paar signalen heeft een faseverschil C van 90 graden (één cyclus is gelijk aan 360 graden).
Daarnaast is er een nulpuntskalibratiesignaal en geeft de encoder één signaal per omwenteling van de schijf.
Uitgangsschema van incrementele encoder
3.2.2 Aansluitingsprincipes van incrementele encoders
1. Enkelfasige aansluiting
Gebruikt voor tellen in één richting en snelheidsmeting in één richting.
2. A-B tweefasige aansluiting
Gebruikt voor bidirectioneel tellen en het bepalen van richting en snelheid.
3. A-B-C driefasige aansluiting
Wordt gebruikt voor snelheidsbepaling met referentiepositiecorrectie.
De A-A-B-C-C-verbinding heeft een symmetrische negatieve signaalverbindingsstroom, die minimale demping en sterke anti-interferentie heeft en over lange afstanden kan worden uitgevoerd.
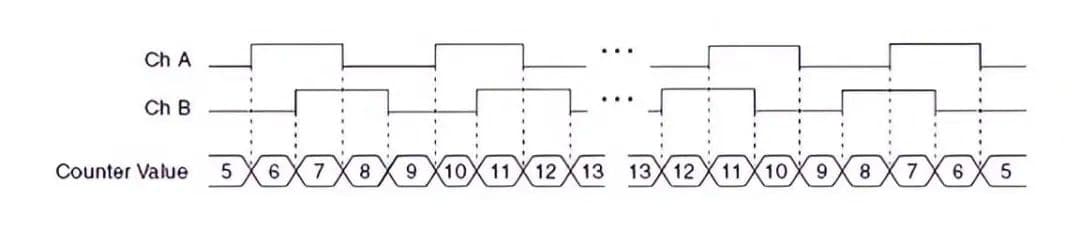
Hoe richting bepalen
Aangezien A en B 90 graden uit fase zijn, kan de richting worden bepaald door te detecteren of A of B als eerste optreedt.
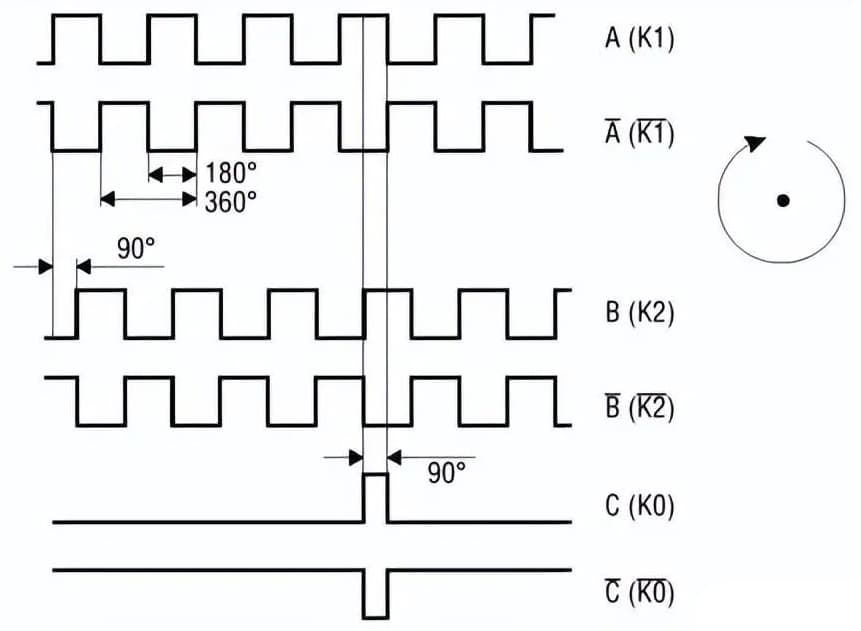
Hoe kalibratie van de nulpositie uit te voeren
Tijdens de transmissie van encoderimpulsen kunnen er fouten optreden door bijvoorbeeld interferentie, wat resulteert in transmissiefouten.
Op dit moment is het noodzakelijk om tijdig de nulpositie te kalibreren.
De C-encoder geeft elke omwenteling één puls af, die een nulimpuls of identificatiepuls wordt genoemd en wordt gebruikt om de nul- of identificatiepositie te bepalen.
Om de nulpuls nauwkeurig te meten, ongeacht de draairichting, wordt de nulpuls uitgevoerd als een combinatie van twee kanalen op hoog niveau.
Door het faseverschil tussen de kanalen is de nulpuls slechts half zo lang als de puls.
Schematisch diagram van nulpuntcorrectie
3.2.3 Vermenigvuldiger van incrementele encoders
Door technologische en bemonsteringsbeperkingen is het onmogelijk om een fijnere en preciezere fysieke verdeling van de codeerschijf te bereiken.
Hogere pulsen kunnen echter worden bereikt door conversie in digitale circuits.
Signaal met dubbele frequentie
Verkregen door "exclusief of" conversie van A- en B-fasen.
Signaal met viervoudige frequentie
De teller neemt ook toe of af op elke rand van kanaal A en B. De richting van de teller wordt bepaald door welk kanaal voorloopt op het andere.
Het getal in de teller stijgt of daalt elke cyclus met 4.
3.2.4 Kenmerken van incrementele encoders
De encoder geeft een pulssignaal voor elke vooraf ingestelde draaihoek en de draaihoek wordt berekend door het aantal pulssignalen te tellen.
Daarom zijn de positiegegevens die door de encoder worden uitgevoerd relatief.
Aangezien er een vast pulssignaal wordt gebruikt, kan de startpositie van de rotatiehoek willekeurig worden ingesteld.
Door het gebruik van relatieve codering gaan de rotatiehoekgegevens verloren en moeten ze opnieuw worden ingesteld na een stroomstoring.
3.2.5 Problemen met incrementele encoders
1) Incrementele encoders hebben cumulatieve nulpuntfouten.
2) Ze kunnen slecht tegen interferentie.
3) Het ontvangende apparaat moet worden uitgeschakeld en de referentiepositie moet opnieuw worden gevonden na stroomuitval of uitschakeling.
De opkomst van absolute encoders lost deze problemen op.
3.3 Principe van de absolute encoder
Een absolute encoder heeft een lichtcodeschijf met verschillende lichtkanalen en lijnen erin gegraveerd.
Elk kanaal wordt gecodeerd met achtereenvolgens 2, 4, 8, 16, enzovoort lijnen.
Bij elke positie van de encoder worden de lichtkanalen gelezen en hun aan/uit-toestand wordt gebruikt om een unieke binaire code te verkrijgen, bekend als Gray-code, variërend van 2^0 tot 2^(n-1), waarbij n het aantal bits van de absolute encoder is.
De positie van de encoder wordt mechanisch bepaald door de lichtcodeschijf en wordt dus niet beïnvloed door stroomuitval of interferentie.
3.3.1 Absolute encoder codeschijf
De lichtcodeschijf wordt gescand door een groep foto-elektrische koppelaars om de unieke code op elke positie te verkrijgen. Elke positie heeft zijn eigen unieke code.
Aangrenzende gehele getallen in de numerieke weergave hebben slechts één verschil, wat het optreden van grote piekstromen in het digitale conversiecircuit kan voorkomen (zoals 3-4, 0011-0100).
Binaire-grijze code conversieformaat:
De hogere cijfers blijven behouden en het op één na hoogste cijfer wordt verkregen door een "exclusive or" operatie uit te voeren op de hogere cijfers en het op één na hoogste cijfer (in binair).
Referentie voor decimale en Gray-codes.
Decimaal
Grijze code
0
0000
1
0001
2
0011
3
0010
4
0110
5
0111
6
0101
7
0100
Decimaal
Grijze code
8
1100
9
1101
10
1111
11
1110
12
1010
13
1011
14
1001
15
1000
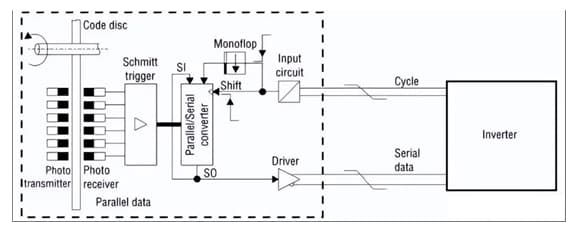
3.3.2 Uitvoerformaten van absolute encoders
1. Parallelle uitgangsmodus
In deze modus is er een kabel voor elke bit van de gegevens (bitkanaal), en het signaalniveau (hoog of laag) op elke kabel vertegenwoordigt een 1 of een 0.
Het fysieke apparaat is vergelijkbaar met een incrementele encoder en heeft verschillende types zoals collector open PNP, NPN, differentiële aandrijving, push-pull en differentieel hoog of laag effectief op basis van het fysieke apparaatformaat.
De parallelle uitvoer heeft meestal de vorm van een Gray code, ook wel Gray code encoder genoemd.
2. Synchrone seriële interface (SSI) uitgang
In deze modus worden gegevens geconcentreerd en verzonden via een groep kabels. De gegevensuitvoer wordt geordend door een communicatieprotocol dat de timing specificeert.
Seriële uitvoer gebruikt minder verbindingslijnen en kan over langere afstanden verzenden, wat de bescherming en betrouwbaarheid van de encoder sterk verbetert.
Absolute encoders met hoge bits en multi-turn absolute encoders maken meestal gebruik van seriële uitvoer.
3. Asynchroon serieel formaat
In deze modus worden instructies en gegevens uitgewisseld via vraag en antwoord en is de interface duplex. Een typisch voorbeeld is de RS485 interface, waarvoor slechts twee kabels nodig zijn.
De gegevensinhoud kan de positiewaarde van de encoder zijn of een andere inhoud die door de instructie wordt gevraagd.
Als er bijvoorbeeld voor elke encoder een adres wordt toegevoegd, kunnen meerdere encoders de transmissiekabel en de daaropvolgende ontvangst delen. Deze vorm wordt een veldbustype genoemd.
4. Principe van hybride encoder
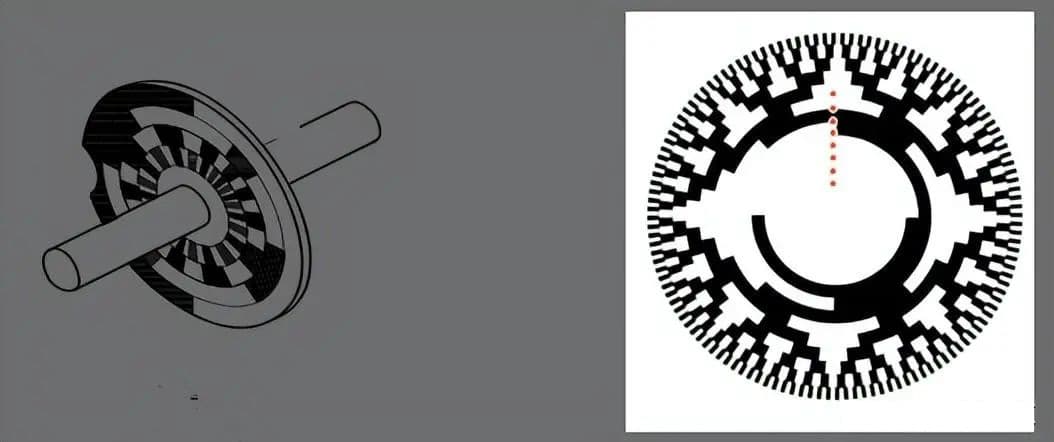
De incrementele codering en absolute codering zijn beide geïntegreerd op dezelfde schijf.
De buitenste cirkel van de schijf bevat incrementele strepen met hoge dichtheid, terwijl het middelste deel het binaire Gray-codekanaal van de absolute encoder is.
De rotatie van de schijf wordt aangegeven door het aantal pulsen per rotatie te tellen en de hoek die binnen een week wordt gedraaid, wordt geteld met de numerieke waarde van de Gray-code.
Multi-turn absolute encoder: gebaseerd op de single-turn absolute encoder, wordt het principe van het kloktandwielmechanisme gebruikt om de rotatie van de centrale schijf over te brengen naar een andere set schijven (of meerdere sets tandwielen en schijven) via tandwieltransmissie, die de codering van het aantal beurten toevoegt op basis van single-turn codering om het meetbereik van de encoder uit te breiden.
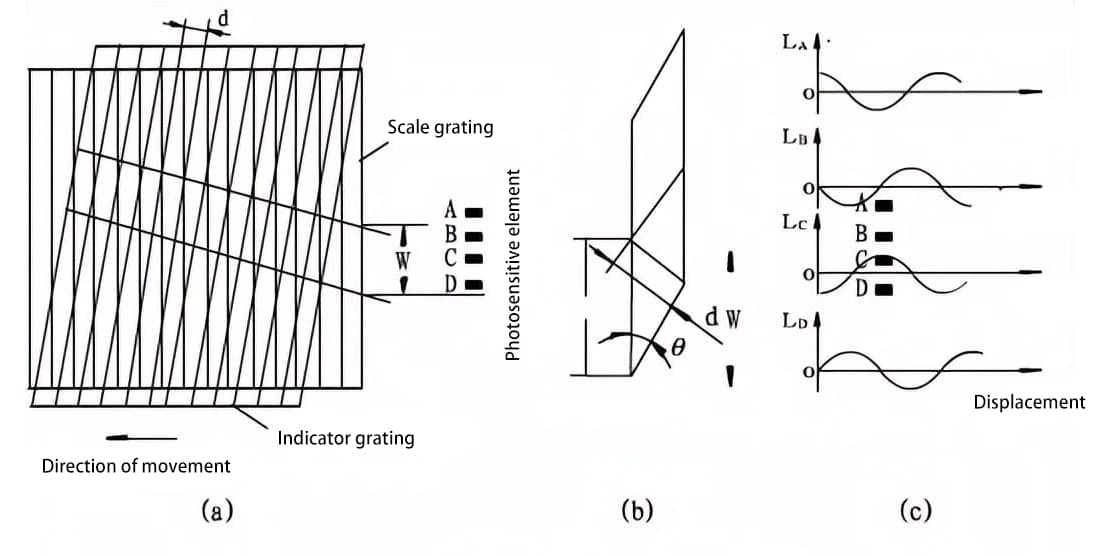
Wanneer evenwijdig licht door een tralie gaat, benadert de intensiteit van de geproduceerde Moiré franjes een cosinusfunctie.
Door vier 1/4 Moiré franjes van fotogevoelige elementen in de richting van de Moiré franjebeweging te plaatsen, kunnen vier sets sinus en cosinus uitgangssignalen worden verkregen.
Uitvoervorm van sinus-cosinus encoder
Figuur Werkingsprincipe van rooster
Lineaire encoder
Een lineaire encoder meet de lineaire verplaatsingsafstand van een voorwerp en zet de gemeten afstand om in een elektrisch pulssignaal.
Eenvoudig gezegd is het principe om de schijf van een roterende encoder uit te rekken tot een rechte lijn.
Encoder met tralieschaal
Het werkingsprincipe van de roosterverplaatsingssensor is dat wanneer het hoofdrooster (d.w.z. het schaalrooster) en het hulprooster (d.w.z. het indicatorrooster) in het roosterpaar relatief worden verplaatst, de interferentie en diffractie van licht een regelmatig zwart-wit (of helder-donker) gestreept patroon produceren, Moiré franje genaamd.
De zwart-witte (of helder-donkere) strepen die hetzelfde zijn, worden via foto-elektrische apparaten omgezet in elektrische signalen die van sinusgolf veranderen.
Na versterking en vervorming door vervormingsschakelingen worden twee sinus- of blokgolfsignalen met een faseverschil van 90 graden verkregen en naar de digitale roosterdisplay gestuurd om geteld en weergegeven te worden.
Roterende transformator
Een roterende transformator, ook wel resolver genoemd, is een type micromotor dat wordt gebruikt voor besturingsdoeleinden.
Het is een indirect meetapparaat dat mechanische rotatie omzet in een elektrisch signaal dat gerelateerd is aan de rotatiehoek door een bepaalde wiskundige functie.
Principe van roterende transformator
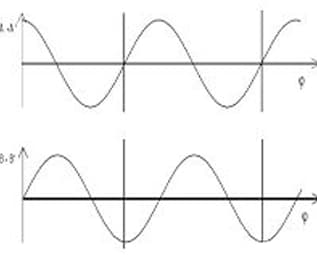
1. Een roterende transformator is een signaalcomponent die een spanning afgeeft die varieert met de rotorhoek.
Wanneer de bekrachtigingswikkeling wordt bekrachtigd door een wisselspanning met een bepaalde frequentie, heeft de spanningsamplitude van de uitgangswikkeling een sinus- of cosinusfunctierelatie met de rotorhoek, of een bepaalde proportionele relatie, of een lineaire relatie met de rotorhoek binnen een bepaald bereik.
2. De magnetische fluxverdeling tussen de stator en de rotor van de roterende transformator volgt een sinusregel.
Wanneer de bekrachtigingsspanning wordt toegepast op de statorwikkeling, genereert de rotorwikkeling daarom een geïnduceerde elektromotorische kracht via elektromagnetische koppeling, zoals weergegeven in de bovenstaande figuur.
De grootte van de uitgangsspanning hangt af van de hoekpositie van de rotor en varieert dus sinusvormig met de verplaatsing van de rotor.
Volgens het transformatorprincipe, als het aantal wikkelingen in de primaire wikkeling N1 is en het aantal wikkelingen in de secundaire wikkeling N2, is k = N1 / N2 de verhouding tussen de wikkelingen. Wanneer een wisselspanning op de primaire wikkeling wordt gezet
Toepassing van roterende transformator
1. Fasedetectiemodus
De fasehoek van de geïnduceerde spanning is gelijk aan de mechanische rotatiehoek van de rotor.
Daarom is de rotatiehoek van de rotor bekend zolang de fasehoek van de uitgangsspanning van de rotor wordt gedetecteerd.
2. Modus voor amplitudedetectie
In praktische toepassingen kan, door de elektrische hoek van de modulatiespanning continu te wijzigen, de variatie van de mechanische hoek worden gevolgd en kan de amplitude van de geïnduceerde spanning worden gemeten om de mechanische hoekverplaatsing te verkrijgen.
5. Voorzorgsmaatregelen voor de installatie van encoders
Mechanische aspecten:
1. Let tijdens de installatie op de toelaatbare asbelasting;
2. Zorg ervoor dat het asverschil tussen de encoderas en de gebruikersas zo groot mogelijk is. uitgaande as is minder dan 0,20 mm en de afwijkingshoek van de as is minder dan 1,5°;
3. Vermijd tijdens de installatie stoten, vallen en botsen om schade aan de as en schijf te voorkomen;
4. Controleer bij langdurig gebruik regelmatig of de schroeven waarmee de encoder is bevestigd, loszitten (één keer per kwartaal).
Elektrische aspecten:
1)De aardingsdraad moet zo dik mogelijk zijn, over het algemeen groter dan 1,5 vierkante millimeter;
2)De uitgangsdraden van de encoder mogen elkaar niet overlappen om schade aan het uitgangscircuit te voorkomen;
3) De signaaldraden van de encoder mogen niet worden aangesloten op gelijkstroom of wisselstroom om schade aan het uitgangscircuit te voorkomen;
4) De apparatuur, zoals motoren, die op de encoder is aangesloten, moet goed geaard zijn en mag geen statische elektriciteit bevatten.
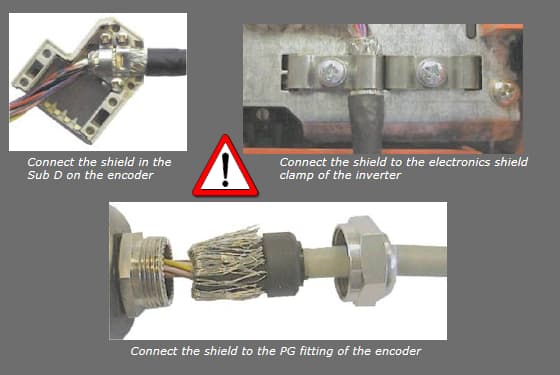
6. Installatie van encoderafschermingskabel.
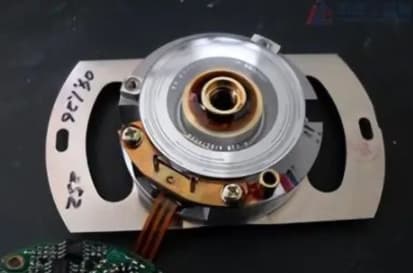
Intern structuurdiagram van een roterende encoder.
Als oprichter van MachineMFG heb ik meer dan tien jaar van mijn carrière gewijd aan de metaalbewerkingsindustrie. Door mijn uitgebreide ervaring ben ik een expert geworden op het gebied van plaatbewerking, verspaning, werktuigbouwkunde en gereedschapsmachines voor metalen. Ik denk, lees en schrijf voortdurend over deze onderwerpen en streef er voortdurend naar om voorop te blijven lopen in mijn vakgebied. Laat mijn kennis en expertise een aanwinst zijn voor uw bedrijf.
Stel je voor dat je de precisie van bewerkingsmachines kunt ontsluiten met een eenvoudig glazen oppervlak. Lineaire roosterschalen doen precies dat en zetten fijne lijnen om in zeer nauwkeurige metingen. Dit artikel onderzoekt hoe deze...
Heb je je ooit afgevraagd hoe scherpe randen op metalen onderdelen worden gladgemaakt? Dit proces, bekend als afschuinen, verandert gevaarlijke, gekartelde hoeken in veiligere, schuine oppervlakken. In dit artikel...
Heb je je ooit afgevraagd welke lagermerken de beste ter wereld zijn? In deze blogpost verkennen we de top lagerfabrikanten die bekend staan om hun uitzonderlijke kwaliteit, innovatie en...
Heb je je ooit afgevraagd wie de wereld achter de schermen van stroom voorziet? In deze blogpost nemen we een diepe duik in de topgeneratorfabrikanten die het licht laten branden...
Ben jij een aspirant werktuigbouwkundig ingenieur die wil uitblinken in zijn vakgebied? In deze blogpost verkennen we de top 10 van onmisbare ontwerpsoftware voor werktuigbouwkunde die je...
Heb je je ooit afgevraagd hoe de integriteit van gelaste moeren en schroeven in je auto wordt gewaarborgd? Dit artikel onthult het nauwgezette proces van kwaliteitscontroles en inspecties die je auto...
Heb je je ooit afgevraagd wat ervoor zorgt dat een elektromotor soepel blijft draaien zonder oververhit te raken? Inzicht in de veilige bedrijfstemperaturen voor motoren is cruciaal voor hun levensduur en prestaties. In dit artikel...
Heb je je ooit verbaasd over de fascinerende wereld van het gieten? Dit eeuwenoude maar zich steeds verder ontwikkelende productieproces geeft op talloze manieren vorm aan ons dagelijks leven. In deze blogpost verkennen we de...
Heb je je ooit afgevraagd hoe de tandwielen in je auto of vliegtuig zo soepel werken? Dit artikel onthult de beste tandwielfabrikanten die de toekomst van werktuigbouwkunde vormgeven. Je leert...