Wat drijft uw elektrische voertuig aan? Van asynchrone wisselstroommotoren tot synchrone permanentmagneetmotoren en zelfs motoren met geschakelde reluctantie, elk type biedt unieke voor- en nadelen. Dit artikel verkent de structuren, principes en toepassingen van deze belangrijke motortypen, zodat je begrijpt hoe ze de prestaties en efficiëntie in elektrische voertuigen beïnvloeden. Duik erin om te ontdekken welke motor uw volgende rit zou kunnen aandrijven!
Op basis van de fundamentele prestatievereisten van de aandrijfmotor voor nieuwe energievoertuigen worden de veelgebruikte typen aandrijfmotoren onderverdeeld in drie hoofdcategorieën: AC asynchrone motoren, permanente magneet synchrone motoren en geschakelde reluctantiemotoren.
Op dit moment gebruikt elk automodel van verschillende autofabrikanten verschillende soorten aandrijfmotoren.
Om het type motor voor een nieuw energievoertuig te kiezen, is het daarom belangrijk om de structuur, het werkingsprincipe en de voor- en nadelen van de aandrijfmotor te begrijpen.
I. AC asynchrone motor
1. Structuur van AC asynchrone motor
De AC asynchrone motor, ook bekend als de inductiemotor, bestaat voornamelijk uit een stator, rotor, motoras, voor- en achterlagers, einddeksel, positiesensor, temperatuursensor, laagspanningskabelboom en hoogspanningskabelboom.
De stator bestaat uit de statorijzeren kern en de driefasige wikkeling; de rotor maakt vaak gebruik van een eekhoornkooirotor, die de rotorijzeren kern en de eekhoornkooiwikkeling bevat.
Afhankelijk van het vermogen van de motor wordt een keuze gemaakt tussen waterkoeling of luchtkoeling. (Afbeelding 1)
Figuur 1 Structureel schematisch diagram van AC asynchrone motor
(1) Werkingsprincipe van AC aandrijving met asynchrone motor
1) De stator levert een roterend magnetisch veld. Om koppel te leveren, moet de asynchrone draaistroommotor driefasige wisselstroom door de statorspoel sturen, waardoor een continu roterend magnetisch veld wordt gecreëerd (met een rotatiesnelheid van het magnetisch veld van ns).
De asynchrone draaistroommotor vereist dat de driefasige wikkelingen van de stator symmetrisch zijn en dat de ijzeren kern van de stator 120 elektrische graden uit elkaar staat. De stroom die door de driefasige symmetrische wikkeling loopt, moet ook symmetrisch zijn, met dezelfde grootte, frequentie en faseverschil van 120 graden. De rotatiesnelheid van het roterende magnetische veld wordt gegeven door vergelijking (1).
ns=60f/p (1)
In deze vergelijking is ns de rotatiesnelheid van het roterende magnetische veld (ook bekend als synchrone snelheid), r/min; f is de frequentie van het driefasige wisselstroomvermogen, Hz; p is het aantal poolparen.
Voor een aandrijfmotor die is ontworpen en in productie is genomen, ligt het aantal poolparen vast, dus de factor die de snelheid van de rotatie van het magnetische veld bepaalt, is de frequentie van de driefasige wisselstroom. Aangezien de netfrequentie in ons land f=50Hz is, is er een lineair verband tussen de motorsnelheid en het aantal poolparen. (Figuur 2)
Figuur 2 Roterend magnetisch velddiagram van tweepolige statorwikkeling
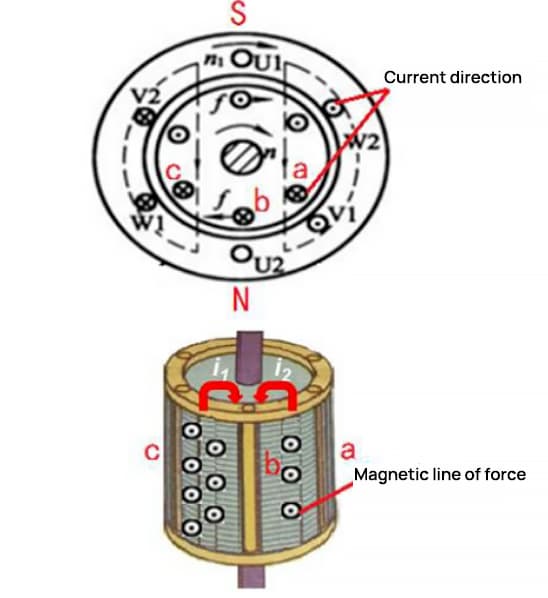
2) De eekhoornkooirotor veroorzaakt geïnduceerde wervelstromen. Aangezien de stator een roterend magnetisch veld levert, wordt een wervelstroom geïnduceerd op de geleider van de kooirotor, zoals getoond in Figuur 3.
Figuur 3 Wervelstroom in kooirotorwikkelingen
In het magnetische gebied tussen geleiders c en b van de eekhoornkooiwikkeling bevinden zich naar buiten gerichte magnetische krachtlijnen, en deze magnetische krachtlijnen worden versterkt onder invloed van het roterende magnetische veld.
Daarom zal een i1 wervelstroom worden geïnduceerd op geleiders c, b; op dezelfde manier zal het verzwakken van magnetische krachtlijnen in het gebied tussen geleider a en geleider b een i2 wervelstroom op de geleider induceren.
De stroom op geleider b zal, onder invloed van het roterende magnetische veld van de stator, ervoor zorgen dat de eekhoornkooiwikkeling geleider b onderhevig is aan elektromagnetische kracht, waardoor de rotor een elektromagnetisch koppel genereert en begint te draaien. De draaiende rotor haalt geleidelijk het roterende magnetische veld in en draait met een snelheid n die iets lager is dan de "synchrone snelheid ns" van het magnetische veld.
Dit fenomeen, waarbij de rotatiesnelheid n van de rotor iets langzamer is dan de magnetische veldsnelheid ns van de stator, wordt rotorslip genoemd. Deze asynchrone slip zorgt ervoor dat de geleider van de eekhoornkooirotor voortdurend de magnetische krachtlijnen snijdt, waardoor geïnduceerde wervelstromen ontstaan.
Bijgevolg wordt elektrische energie op de rotor omgezet in mechanische energie, wat zorgt voor een continue externe output.
(2) Het principe van vermogensopwekking bij asynchrone draaistroommotoren
Volgens de wet van Faraday over elektromagnetische inductie wordt er een geïnduceerde stroom opgewekt in de geleider wanneer een deel van de geleider van een gesloten circuit de magnetische veldlijnen in beweging doorsnijdt, waarbij de opgewekte elektromotorische kracht bekend staat als de geïnduceerde elektromotorische kracht.
In een asynchrone wisselstroommotor wordt, wanneer de motor als generator wordt gebruikt, de stator bekrachtigd met een driefasenstroom om het magnetische veld te leveren en de rotorwikkeling levert de geleider.
Wanneer een externe mechanische kracht, zoals de aandrijfas van een auto, de rotoras aandrijft, waardoor de rotor beweegt, als de snelheid van de rotor hoger is dan de synchrone snelheid van het roterende magnetische veld van de stator, werkt de AC asynchrone motor als een generator.
De richting van de rotor die het roterende magnetische veld snijdt is tegengesteld aan wanneer hij als aandrijfmotor werkt, dus de richting van de geïnduceerde elektromotorische kracht van de rotor is ook omgekeerd.
Tijdens het energieopwekkingsproces ondervindt de rotor van de motor een elektromagnetisch koppel dat tegengesteld is aan de externe trekkracht, waardoor de rotorsnelheid afneemt.
3. Voordelen, nadelen en toepassingen van asynchrone draaistroommotoren
Asynchrone wisselstroommotoren blinken uit in het leveren van een instelbaar uitgangskoppel over een groot bereik, en kunnen het uitgangskoppel gedurende korte perioden geforceerd verhogen tijdens accelereren of klimmen. Elektrische voertuigen die worden aangedreven door permanente magneet synchrone motoren maken vaak gebruik van extra versnellingsbakmechanismen om het koppel te verhogen voor snelheidsverhoging.
Asynchrone draaistroommotoren hebben echter een aantal nadelen. Vanwege de eenzijdige bekrachtiging vereisen ze grotere aanloopstromen en meer stroom per eenheid geproduceerd koppel. De stator herbergt reactieve bekrachtigingsstromen, wat leidt tot een hoger energieverbruik dan bij synchrone motoren met permanente magneet, met een achterblijvende arbeidsfactor.
Overbelastingsomstandigheden komen vaak voor bij zware aandrijvingen. Hun relatief complexe structuur vereist een hoge regeltechnische expertise, waardoor ze duurder zijn om te produceren, en ze hebben een relatief lagere vermogensdichtheid.
Momenteel worden asynchrone draaistroommotoren veel gebruikt als aandrijfmotoren in elektrische voertuigen die in de Verenigde Staten zijn ontwikkeld.
II. Synchrone motor met permanente magneet
1. Structuur van synchrone motor met permanente magneet
De structuur van een synchrone motor met permanente magneet bestaat uit een stator, rotor, motoras, voor- en achterlagers, eindkap, koelwaterkanaal, positiesensor, temperatuursensor, laagspanningskabel en voedingskabel.
De stator wordt gevormd door de statorijzeren kern en driefasenwikkelingen; de rotor bestaat uit permanente magneetpolen en een ijzeren kern, waarbij de ijzeren kern is gemaakt van gestapelde platen van siliciumstaal.
De opstelling van de permanente magneten in de rotor omvat hoofdzakelijk opbouw-, inbouw- en interne permanente magneetrotors, waarbij interne permanente magneetrotors vaak gebruikt worden in nieuwe energiemotoren. (Afbeelding 4)
Figuur 4 Schematisch diagram van permanentmagneetsynchroon motorstructuur
2. Werkingsprincipe van synchrone motor met permanente magneet
(1) Aandrijfprincipe van synchrone motor met permanente magneet
Het roterende magnetische veld wordt geleverd door de stator en wordt op dezelfde manier en met dezelfde snelheid geproduceerd als bij een asynchrone wisselstroommotor. De magnetische polen worden geleverd door de permanente magneten van de rotor.
Het roterende magnetische veld dat door de stator wordt gegenereerd, vormt dus een circuit met de permanente magneetpolen en de ijzeren kern van de rotor. Volgens het principe van minimale magnetische weerstand, d.w.z. de magnetische flux sluit altijd langs de weg van de minste magnetische weerstand, wordt de rotor in rotatie getrokken door de elektromagnetische kracht van het roterende veld.
Bijgevolg draait de rotor met permanente magneet synchroon met het roterende magnetische veld dat door de stator wordt gegenereerd, waardoor de rotatie van de motoras wordt aangedreven.
(2) Principe van vermogensopwekking van synchrone permanente-magneetmotoren
Volgens de wet van Faraday over elektromagnetische inductie wordt een deel van de geleider van het gesloten circuit gevoed door de driefasige statorwikkelingen, terwijl het magnetische veld wordt geleverd door de permanente magneten op de rotor.
Wanneer een extern koppel de rotor laat draaien, genereert het een roterend magnetisch veld dat een deel van de geleiders in de driefasige statorwikkelingen doorsnijdt en een symmetrische driefasenstroom opwekt.
Op dit punt wordt de kinetische energie van de rotor omgezet in elektrische energie en werkt de synchrone permanentmagneetmotor als een generator.
3. Voordelen, nadelen en toepassingsgebied van synchrone permanente-magneetmotoren
De voordelen van een synchrone motor met permanente magneet zijn onder andere de kleine afmetingen, het lichte gewicht, de hoge vermogensdichtheid, het lagere energieverbruik, de lagere temperatuurstijging en de hogere efficiëntie in vergelijking met asynchrone motoren.
Hij kan worden ontworpen als een gestructureerde motor met een hoog startkoppel en een hoge overbelastingscapaciteit op basis van de vereisten.
De synchrone motor met permanente magneet synchroniseert strikt en heeft een goede dynamische respons, geschikt voor frequentieregeling; het koppel en de snelheid van de motor kunnen over een breed bereik worden aangepast door de stroom en frequentie te wijzigen.
Het permanente magneetmateriaal dat wordt gebruikt in synchrone motoren met permanente magneet is echter meestal sterk magnetisch neodymium-ijzer-boor-materiaal, dat relatief bros is en kan breken onder intense trillingen.
Bovendien kan het gebruik van permanent magneetmateriaal in de rotor leiden tot magnetisch verval tijdens de werking van de motor en tot oververhitting, wat resulteert in een afname van het vermogen.
Momenteel worden synchrone motoren met permanente magneet veel gebruikt in motoren voor nieuwe energievoertuigen, waarbij de nieuwe energiemarkten in Azië en Europa voornamelijk gebruikmaken van synchrone motoren met permanente magneet als nieuwe energiemotoren.
III. Geschakelde reluctantiemotor
1. Structuur van de geschakelde reluctantiemotor
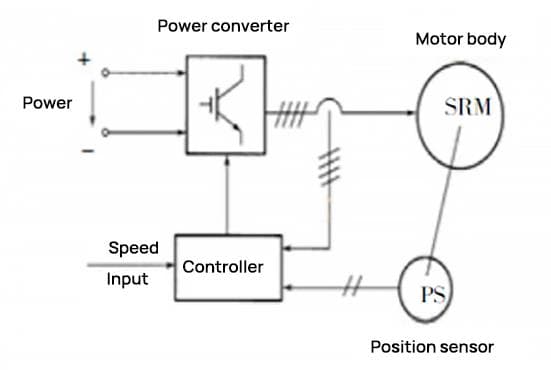
De Switched Reluctance Motor (SRM) is een typische mechatronische motor, ook bekend als het "Switched Reluctance Drive System". De motor bestaat voornamelijk uit vier componenten: de SRM zelf, een vermogensomvormer, rotorpositiesensoren en een besturingseenheid, zoals weergegeven in afbeelding 5.
Afbeelding 5 Systeemblokschema van geschakelde reluctantiemotor
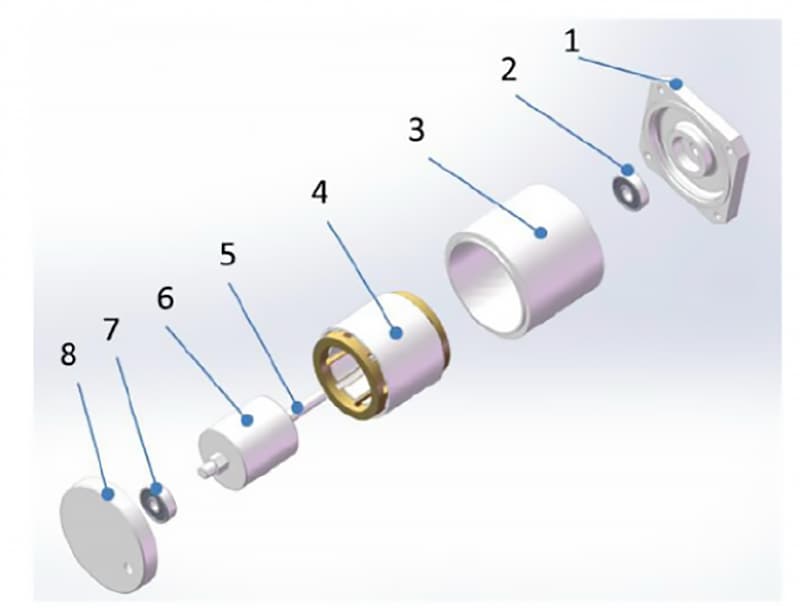
De hoofdstructuur van de SRM omvat de stator, rotor, positiesensoren, voor- en achterlagers, voor- en achtereindkappen en de motorbehuizing, zoals weergegeven in figuur 6. De stator bestaat uit de statorkern en de wikkelingen.
Figuur 6 Structuur van geschakelde reluctantiemotor
Zowel de statorkern als de rotor maken gebruik van salient-poolstructuren en zijn opgebouwd uit gelamineerde siliciumstalen platen. De salientpolen van de stator zijn uitgerust met wikkelingen, terwijl de rotor geen wikkelingen of permanente magneten heeft.
De driefasige 6/4-poolstructuur geeft aan dat de stator van de motor zes saillante polen heeft en de rotor vier saillante polen. De geconcentreerde wikkelingen op twee symmetrische polen van de stator worden in serie geschakeld om een fase te vormen, en het aantal fasen is gelijk aan het aantal polen van de stator gedeeld door twee, zoals getoond in Figuur 7(a).
Figuur 7 Aardpool en wikkelingsstructuur van geschakelde reluctantiemotor
De driefasige 12/8-poolstructuur geeft aan dat de stator van de motor twaalf saillante polen heeft en de rotor acht saillante polen. De wikkelingen op vier symmetrische polen van de stator worden in serie geschakeld om een fase te vormen, en het aantal fasen is gelijk aan het aantal polen van de stator gedeeld door vier, zoals getoond in Figuur 7(b).
Hoe meer fasen een motor met geschakelde reluctantie heeft, hoe kleiner de staphoek, hoe soepeler de werking en hoe gunstiger het is om koppelrimpel te verminderen. De besturing wordt echter complexer, waardoor het aantal hoofdschakelapparaten en de kosten toenemen.
De berekening voor de opstaphoek wordt getoond in vergelijking (2):
Bijvoorbeeld, voor een driefasige 6/4-polige motor is de staphoek α = 360° × 2/(6×4) = 30°.
2. Werkingsprincipe van de geschakelde reluctantiemotor
(1) Werkingsprincipe van de geschakelde reluctantiemotor
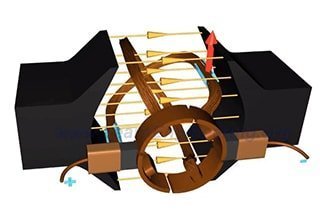
Zoals weergegeven in het werkingsprincipeschema van de driefasige 12/8-polige SRM in afbeelding 8, wordt de A-fase bekrachtigd en gemagnetiseerd wanneer de stroom van de A-fase wikkeling de hoofdschakelaar S1, S2 sluit.
Afbeelding 8 Werkingsprincipe van geschakelde reluctantiemotor
De magnetische veldkracht die in de motor wordt opgewekt, vormt een radiaal magnetisch veld met OA als as. De magnetische krachtlijnen van dit veld worden gebogen waar ze door de luchtspleet tussen de statorpolen en de rotorpolen gaan.
Op dat moment is de magnetische reluctantie van het magnetische circuit groter dan wanneer de statorpool en de rotorpool samenvallen. Daarom wordt de rotorpool beïnvloed door de magnetische aantrekkingskracht, die de rotorpoolas Oa uitlijnt met de statorpoolas OA.
Dit genereert een elektromagnetisch koppel van magnetische reluctantie-eigenschap, waardoor de rotor linksom begint te draaien. Wanneer de A-fasestroom wordt uitgeschakeld en de B-fase stroombron tot stand wordt gebracht, draait het magnetische veld in de motor 30 graden.
De rotor draait dan nog eens 15 graden linksom onder invloed van de elektromagnetische trekkracht. Als er achtereenvolgens stroom wordt toegevoerd aan de A-B-C-A-fase wikkelingen, zal de rotor continu linksom draaien.
Wanneer de statorwikkelingen in elke fase om beurten bekrachtigd worden, roteert het magnetisch veld van de stator 3×30 graden en roteert de rotor een rotorpoolafstand van 3×15 graden (d.w.z. 360 graden / aantal rotorpolen).
Als de stroom achtereenvolgens wordt geleverd aan de A-C-B-A-fasewikkelingen, zal de rotor met de wijzers van de klok mee draaien. De draairichting van de geschakelde reluctantiemotor is niet gerelateerd aan de stroomrichting, maar wordt bepaald door de inschakelvolgorde van de statorfasewikkelingen.
In de praktijk komt het bij meerfasemotoren ook vaak voor dat twee of meer fasewikkelingen gelijktijdig bekrachtigd worden.
(2) Werkingsprincipe van een geschakelde reluctantiegenerator
De bedrijfstoestand van een geschakelde reluctantiegenerator omvat drie condities: de excitatietoestand, de continuatietoestand en de stroomopwekkingstoestand, zoals de golfvorm van de fase-inductantie L in Figuur 10 laat zien.
Figuur 9 Schematisch diagram van de werkingstoestand van een geschakelde reluctantiemotor
Figuur 10 Veranderingen in fase-inductantie met rotorpositie
In Figuur 9 is de hoek θ gedefinieerd als de hoek tussen de poolas van de rotortand en de as van de statorvertanding. Wanneer de as van de rotortandpool op één lijn ligt met de overeenkomstige as van de stator tandgleuf, is de fase-inductie minimaal (gedefinieerd als θ=0°). De fase-inductantie van de wikkeling blijft constant op Lmin tot de voorrand van de rotorpool de achterrand van de statorpool ontmoet (θ=θ1).
Als de rotor blijft draaien en de rotorpool begint te overlappen met de statorpool, tot de achterrand van de rotorpool en de achterrand van de statorpool volledig op één lijn liggen (op dat moment is θ=θ2), neemt de fase-inductie van de wikkeling lineair toe binnen dit gebied en bereikt een maximum van Lmax.
Wanneer de rotor blijft roteren zodat de voorrand van de rotorpool op één lijn ligt met de voorrand van de statorpool (op dit moment, θ=θ4), blijft de fase-inductie op Lmax.
Volgens de basistheorie van het elektromagnetische veld gaat het bestaan van een magnetisch veld gepaard met het elektromagnetische koppel van de motorrotor, dat kan worden weergegeven door vergelijking (3).
Als de wikkelingen van de geschakelde reluctantiemotor worden in- en uitgeschakeld tussen θ3 en θ4, werkt de motor als een generator. Op dat moment vormt zich een stroom in het dalende inductantiegebied, dus dL/dθ<0.
Als er op dat moment stroom door de fasewikkelingen loopt, wordt er een remmoment (T(θ, i)<0) gegenereerd. Als een externe mechanische kracht de rotatie van de motor in stand houdt, absorbeert de motor mechanische energie en zet deze om in elektrische output, wat aangeeft dat de geschakelde reluctantiemotor in generatormodus werkt.
3. Voordelen, nadelen en toepassingsgebied van motoren met geschakelde reluctantie
De voordelen van motoren met geschakelde reluctantie zijn hun eenvoudige en betrouwbare structuur, goede opstartprestaties, hoge efficiëntie en lage kosten. Ze bieden een breed scala aan snelheidsregelingsmogelijkheden door de geleiding, uitschakelhoeken en spanning te variëren. De nadelen zijn echter een aanzienlijke koppelrimpel en veel ruis.
Momenteel worden ze gebruikt in sommige kleine elektrisch aangedreven voertuigen, zoals elektrische scooters op vier wielen en patrouillewagens.
IV. Conclusie
Gezien de verschillende prestatiekenmerken die de aandrijfmotoren van nieuwe energievoertuigen vereisen, varieert het type aandrijfmotor dat wordt gekozen tussen de verschillende modellen op de markt.
Dit artikel beschrijft de structuur en werkingsprincipes van veelgebruikte nieuwe energie aandrijfmotoren zoals AC asynchrone motoren, permanent magneet synchrone motoren en geschakelde reluctantiemotoren. Deze informatie zal helpen om deze aandrijfmotoren beter te begrijpen.
Bovendien verschillen de structuur en principes van elk motortype, wat leidt tot een breed scala aan toepassingen. Volgens de nationale industriële strategische planning zal het onderzoek naar elektrische aandrijfsystemen voor milieuvriendelijke nieuwe energievoertuigen zich blijven uitbreiden. Bijgevolg zullen ook de variëteit en het technologische niveau van motoren blijven toenemen.
Als oprichter van MachineMFG heb ik meer dan tien jaar van mijn carrière gewijd aan de metaalbewerkingsindustrie. Door mijn uitgebreide ervaring ben ik een expert geworden op het gebied van plaatbewerking, verspaning, werktuigbouwkunde en gereedschapsmachines voor metalen. Ik denk, lees en schrijf voortdurend over deze onderwerpen en streef er voortdurend naar om voorop te blijven lopen in mijn vakgebied. Laat mijn kennis en expertise een aanwinst zijn voor uw bedrijf.
Heb je je ooit afgevraagd hoe treinen boven de rails kunnen zweven of hoe robots precieze bewegingen kunnen maken? Dit artikel onthult de fascinerende wereld van lineaire motoren en legt hun principes, typen en unieke voordelen uit....
Servosystemen vormen een integraal onderdeel van elektromechanische producten en bieden het hoogste niveau van dynamische respons en koppeldichtheid. De trend in de ontwikkeling van aandrijfsystemen is dan ook om traditionele...
Heb je je ooit afgevraagd wat gelijkstroommotoren onderscheidt van wisselstroommotoren? In dit artikel verkennen we de fundamentele verschillen tussen deze twee soorten motoren, waaronder hun werkingsprincipes,...
In de snelle wereld van industriële automatisering zijn servomotoren de onbezongen helden van precisie en efficiëntie. Maar met talloze fabrikanten die om aandacht strijden, hoe weet u welke...
Heb je je ooit afgevraagd hoe machines onzichtbare krachten omzetten in krachtige bewegingen? In deze blogpost verkennen we de fascinerende wereld van pneumatische en hydraulische transmissies. Je leert hoe deze...
Heb je je ooit afgevraagd wat de wereld soepel laat draaien? De onbezongen helden achter de schermen zijn de lagers. Deze kleine maar machtige onderdelen spelen een cruciale rol in het verminderen van wrijving...
Heb je je ooit afgevraagd wat de machines aandrijft die onze wereld aandrijven? Tandwielkasten zijn de onbezongen helden achter veel industrieën, van de auto-industrie tot windenergie. In dit artikel ontdek je...
Het kiezen van de juiste servomotor voor je project kan een ontmoedigende taak zijn met zoveel beschikbare opties. Dit artikel vereenvoudigt het proces door de belangrijkste overwegingen te...
Hoe zetten elektromotoren elektriciteit om in beweging? Stel je een wereld voor waarin bijna de helft van onze energie door deze motoren wordt aangedreven. Dit artikel duikt in de wetenschap achter elektromotoren en legt uit...