I. Verschillen tussen verschillende motoren
1. Verschillen tussen gelijkstroom- en wisselstroommotoren
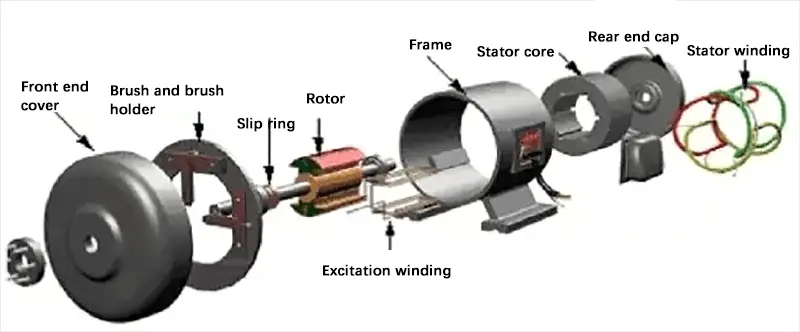
Schematisch diagram van gelijkstroommotor
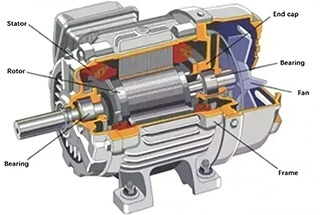
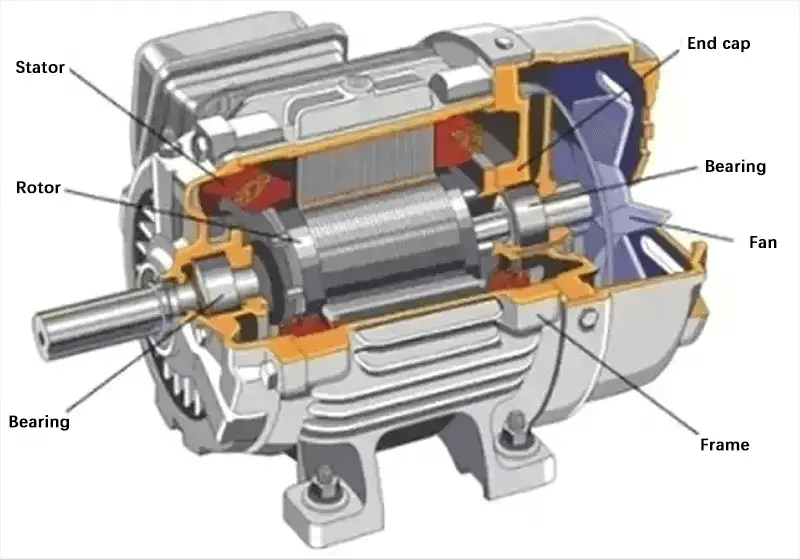
Schematisch diagram van AC-motor
Zoals de naam al aangeeft, gebruikt een gelijkstroommotor gelijkstroom (DC) als energiebron, terwijl een wisselstroommotor wisselstroom (AC) als energiebron gebruikt.
Qua structuur is het principe van een gelijkstroommotor relatief eenvoudig, maar de structuur is complex en moeilijk te onderhouden. Anderzijds is het principe van een wisselstroommotor complex, maar de structuur is relatief eenvoudig en gemakkelijker te onderhouden in vergelijking met een gelijkstroommotor.
Qua prijs zijn gelijkstroommotoren met hetzelfde vermogen meestal duurder dan wisselstroommotoren. Bovendien zijn de kosten van een gelijkstroommotor hoger als je een snelheidsregelaar toevoegt om de snelheid te regelen.
Wat de prestaties betreft, is de snelheid van een gelijkstroommotor stabiel en de snelheidsregeling nauwkeurig, wat niet kan worden bereikt met een wisselstroommotor. Gelijkstroommotoren worden echter alleen gebruikt als vervanging voor wisselstroommotoren met strenge snelheidseisen.
Hoewel de snelheidsregeling van een wisselstroommotor complexer is, wordt deze veel gebruikt vanwege het wijdverbreide gebruik van wisselstroom in chemische fabrieken.
2. Verschillen tussen synchrone en asynchrone motoren
Een synchrone motor is een type motor waarbij de rotatiesnelheid van de rotor dezelfde is als die van de stator. Anderzijds is een asynchrone motor een motortype waarbij de rotatiesnelheid van de rotor niet dezelfde is als die van de stator.
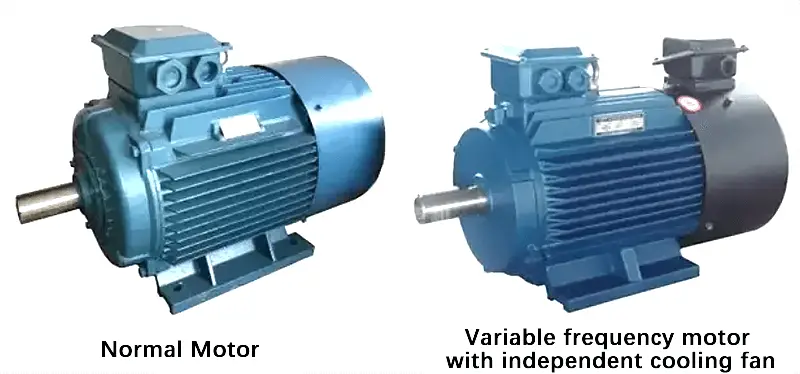
3. Verschillen tussen gewone motoren en motoren met variabele frequentie
Het is duidelijk dat gewone motoren niet kunnen worden gebruikt als motoren met variabele frequentie. Dit komt omdat gewone motoren ontworpen zijn om te werken met constante frequentie en constante spanning, wat niet volledig voldoet aan de vereisten van frequentieregeling voor snelheidsregeling. Daarom kunnen ze niet worden gebruikt als frequentieomvormingsmotor.
De impact van de frequentieregelaar op de motor beïnvloedt voornamelijk de efficiëntie en temperatuurstijging. De frequentieregelaar genereert tijdens bedrijf verschillende harmonische spanningen en stromen, waardoor de motor werkt onder niet-sinusvormige spanningen en stromen. Dit leidt tot een toename in het koperverbruik van de stator en rotor, het ijzerverbruik en extra verliezen in de motor.
Van alle invloeden is het belangrijkste het koperverbruik van de rotor, waardoor de motor meer warmte genereert en zijn efficiëntie en uitgangsvermogen afnemen. Als gevolg hiervan neemt de temperatuurstijging van gewone motoren over het algemeen toe met 10% tot 20%.
Het frequentiebereik van de frequentieregelaar loopt van enkele kilohertz tot meer dan tien kilohertz, wat resulteert in een hoge spanningsstijgsnelheid in de statorwikkeling van de motor. Dit komt overeen met het toepassen van een hoge impulsspanning op de motor, waardoor de turn-to-turn isolatie van de motor zwaar op de proef wordt gesteld.
Wanneer een motor wordt aangedreven door een frequentieregelaar, worden de trillingen en geluiden die worden gegenereerd door elektromagnetische, mechanische, ventilatie en andere factoren complexer.
De harmonischen die aanwezig zijn in de voeding met variabele frequentie interageren met de inherente ruimteharmonischen van het elektromagnetische deel van de motor, wat resulteert in verschillende elektromagnetische bekrachtigingskrachten en meer ruis.
Het brede werkfrequentiebereik en het grote snelheidsvariatiebereik van de motor maken het moeilijk om de natuurlijke trillingsfrequentie van elk structureel onderdeel te vermijden, wat resulteert in een frequentie van verschillende elektromagnetische krachtgolven.
Bij een lage vermogensfrequentie is het verlies door hogere harmonischen in de voeding aanzienlijk. Bovendien neemt, naarmate de snelheid van de variabele motor afneemt, het volume van de koellucht evenredig af met de kubus van de draaisnelheid, wat leidt tot een sterke toename in motortemperatuur en moeite om een constant koppel te bereiken.
Dus hoe maak je onderscheid tussen een gewone motor en een motor met variabele frequentie?
II. Structurele verschillen tussen gewone motoren en variabele frequentiemotoren
1. Hogere eisen voor isolatieklasse
Gewoonlijk hebben motoren met variabele frequentie een isolatiewaarde van F of hoger. Om de isolatiesterkte te verbeteren, is het belangrijk om de isolatie van de aarde en de draadbochten te verbeteren, met name de weerstand tegen impulsspanning.
2. Motoren met variabele frequentie vereisen meer trillingen en geluid
Voor motoren met variabele frequentie is het belangrijk om volledig rekening te houden met de stijfheid van zowel de motoronderdelen als de hele motor. Er moeten inspanningen worden gedaan om de natuurlijke frequentie van de motor om resonantie met eventuele krachtgolven te voorkomen.
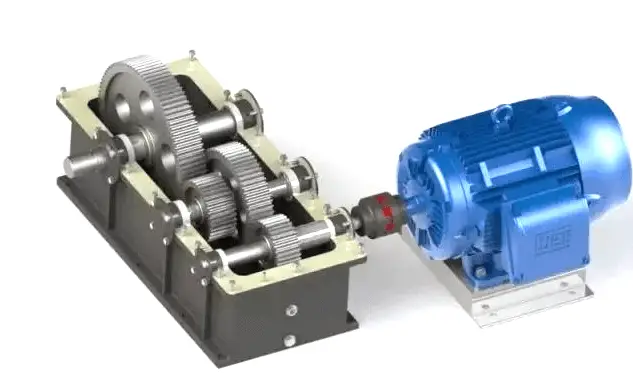
3. Motor met variabele frequentie heeft verschillende koelmodi
De motor met variabele frequentie gebruikt gewoonlijk geforceerde ventilatie voor koeling, wat betekent dat de koelventilator van de hoofdmotor wordt aangedreven door een aparte motor.
4. Verschillende vereisten voor beschermingsmaatregelen
Voor motoren met variabele frequentie met een vermogen van meer dan 160 kW moeten maatregelen worden genomen om de lagers te isoleren.
Dit is te wijten aan de waarschijnlijkheid van asymmetrie in het magnetische circuit en het genereren van asstroom. Wanneer hoogfrequente stromen die door andere componenten worden gegenereerd, worden gecombineerd, kan dit de asstroom aanzienlijk verhogen, wat kan leiden tot schade aan de lagers. Om dit te voorkomen, zijn isolatiemaatregelen meestal noodzakelijk.
Voor motor met constant vermogen en variabele frequentie
Als de rotatiesnelheid hoger is dan 3000 omwentelingen per minuut, is het belangrijk om een speciaal vet met hoge temperatuurbestendigheid te gebruiken om de temperatuurstijging van het lager tegen te gaan.
5. Verschillende koelsystemen
De koelventilator van de motor met variabele frequentie wordt gevoed door een aparte voedingsbron om een continue koeling te garanderen.
III. Selectie van de motor
De basisinhoud die nodig is voor de motorselectie:
Type belasting, nominaal vermogen, nominale spanning, nominale snelheid en andere aangedreven omstandigheden.
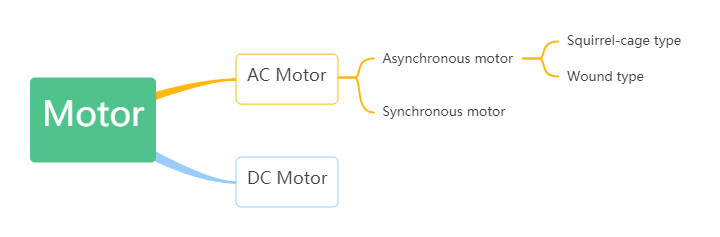
1. Soorten aangedreven belastingen
Dit moet worden benaderd vanuit de kenmerken van motoren, die eenvoudig kunnen worden onderverdeeld in gelijkstroommotoren (DC) en wisselstroommotoren (AC), waarbij AC verder kan worden onderverdeeld in synchrone en asynchrone motoren.
(1) Gelijkstroommotoren
Het voordeel van gelijkstroommotoren is het gemak van snelheidsregeling via spanningsaanpassingen, gecombineerd met de mogelijkheid om een aanzienlijk koppel te leveren. Ze zijn geschikt voor belastingen waarbij de snelheid vaak moet worden aangepast, zoals walserijen in staalfabrieken en liften in mijnen.
Met de vooruitgang van de frequentieconversietechnologie kunnen wisselstroommotoren echter ook de snelheid aanpassen door de frequentie te veranderen. Hoewel de kosten van een motor met variabele frequentie niet veel hoger zijn dan die van gewone motoren, maakt de prijs van de frequentieregelaar een aanzienlijk deel uit van de totale uitrustingskosten. Een ander voordeel van gelijkstroommotoren is dus hun kosteneffectiviteit.
Een nadeel van gelijkstroommotoren is hun complexe structuur, wat onvermijdelijk leidt tot hogere uitvalpercentages. In vergelijking met AC-motoren hebben DC-motoren niet alleen complexere wikkelingen (bekrachtigings-, commuterende-, compensatie- en ankerwikkelingen), maar bevatten ze ook extra componenten zoals sleepringen, borstels en commutators.
Deze vereisten vereisen niet alleen een hoge productieprecisie, maar leiden op de lange termijn ook tot hogere onderhoudskosten.
Daarom bevinden gelijkstroommotoren zich in een lastige positie in industriële toepassingen, ze verliezen geleidelijk aan populariteit maar zijn nog steeds nuttig tijdens de overgangsfase. Als de gebruiker over voldoende middelen beschikt, is het aan te raden om te kiezen voor een wisselstroommotor met frequentieregelaar, gezien de vele voordelen die frequentieregelaars bieden.
(2) Asynchrone motoren
De voordelen van asynchrone motoren zijn hun eenvoudige structuur, stabiele prestaties, eenvoudig onderhoud en lage kosten. Ze hebben ook het eenvoudigste productieproces. Zoals een oude monteur van een werkplaats ooit zei, zouden de arbeidsuren die besteed worden aan het assembleren van een gelijkstroommotor ruwweg twee synchrone motoren of vier asynchrone motoren van vergelijkbaar vermogen kunnen voltooien. Dit spreekt boekdelen over het wijdverbreide gebruik van asynchrone motoren in de industrie.
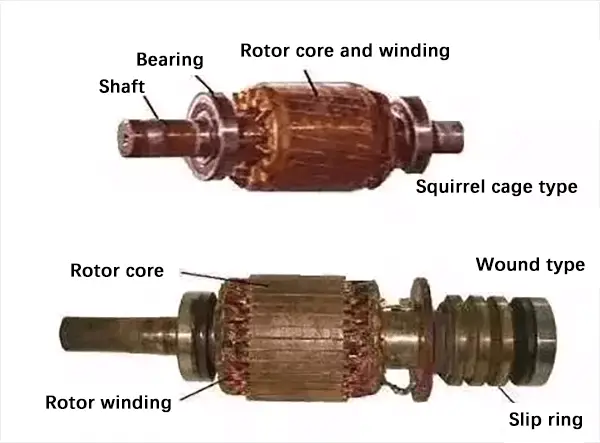
Asynchrone motoren worden verder onderverdeeld in types met een eekhoornkooi en types met een gewikkelde rotor, die van elkaar verschillen door hun rotor. De rotor van een eekhoornkooimotor is gemaakt van metalen staven, koper of aluminium.
Aluminium is goedkoper en omdat China rijk is aan bauxiet, wordt het op grote schaal gebruikt waar de eisen niet hoog zijn.
De mechanische en elektrische eigenschappen van koper zijn echter superieur aan die van aluminium, en de meeste rotors die ik ben tegengekomen zijn van koper. Motoren met een eekhoornkooi zijn, als het probleem van gebroken staven eenmaal is opgelost, aanzienlijk betrouwbaarder dan motoren met gewikkelde rotors.
Een nadeel is echter dat het koppel dat wordt gegenereerd door een metalen rotor die magnetische lijnen snijdt in een roterend statorveld relatief klein is en dat de startstroom groot is, waardoor het moeilijk is om belastingen aan te kunnen die een hoog startkoppel vereisen.
Hoewel het vergroten van de lengte van de motorkern meer koppel kan opleveren, is het effect vrij beperkt. Bij motoren met een gewikkelde rotor wordt de rotorwikkeling bij het opstarten bekrachtigd door middel van sleepringen, waardoor er een magnetisch veld in de rotor ontstaat. De resulterende relatieve beweging met het roterende statorveld produceert een hoger koppel.
Tijdens het opstarten wordt de aanloopstroom verminderd door het gebruik van waterweerstanden, waarvan de weerstand wordt geregeld door een geavanceerd elektronisch regelapparaat dat de waarde verandert tijdens het opstartproces. Dit is geschikt voor belastingen zoals walserijen en liften.
Omdat asynchrone motoren met gewikkelde rotor componenten toevoegen zoals sleepringen en waterweerstanden, zijn de totale uitrustingskosten echter iets hoger. Vergeleken met gelijkstroommotoren hebben ze een kleiner snelheidsaanpassingsbereik en een relatief kleiner koppel, waardoor hun waarde lager is.
Omdat asynchrone motoren echter een roterend magnetisch veld creëren door de statorwikkeling te bekrachtigen, wat een inductieve component is die geen arbeid verricht, onttrekken ze reactief vermogen aan het net, wat een aanzienlijke impact heeft.
Wanneer bijvoorbeeld een groot inductief apparaat op het elektriciteitsnet wordt aangesloten, daalt de netspanning en neemt de helderheid van elektrische verlichting abrupt af.
Daarom kunnen energiebedrijven het gebruik van asynchrone motoren beperken, waar veel fabrieken rekening mee moeten houden. Sommige grote elektriciteitsverbruikers, zoals staal- en aluminiumfabrieken, kiezen ervoor om hun eigen elektriciteitscentrales op te zetten, die onafhankelijke netwerken vormen, om deze gebruiksbeperkingen te verlichten.
Als een asynchrone motor dus moet voldoen aan de behoeften van belastingen met een hoog vermogen, moet deze worden uitgerust met een apparaat voor compensatie van blindvermogen. Synchrone motoren kunnen daarentegen reactief vermogen aan het net leveren via bekrachtigingsapparaten. Hoe groter het vermogen, hoe duidelijker de voordelen van synchrone motoren, waardoor er een fase voor het gebruik ervan ontstaat.
(3) Synchrone motoren
Naast het compenseren van reactief vermogen in een overbelaste toestand, hebben synchrone motoren ook de volgende voordelen:
1) De snelheid van de synchrone motor volgt strikt n=60f/p, waardoor een nauwkeurige snelheidsregeling mogelijk is.
2) Ze bieden een hoge operationele stabiliteit; bij een plotselinge daling in de netspanning dwingt het bekrachtigingssysteem gewoonlijk bekrachtiging af om een stabiele werking te garanderen, terwijl het koppel van een inductiemotor (evenredig met het kwadraat van de spanning) aanzienlijk zou afnemen.
3) De overbelastingscapaciteit is groter dan die van een vergelijkbare inductiemotor.
4) Ze hebben een hoge operationele efficiëntie, vooral in het geval van synchrone motoren met lage snelheid.
Synchrone motoren kunnen niet rechtstreeks starten; ze moeten worden opgestart door inductie of frequentieconversie. Inductiestart verwijst naar het proces waarbij een opstartwikkeling die lijkt op de kooiwikkeling van een inductiemotor op de rotor van de synchrone motor wordt geïnstalleerd.
Een extra weerstand met een weerstandswaarde van ongeveer tien keer die van de bekrachtigingswikkeling is in serie geschakeld in het bekrachtigingscircuit om een gesloten circuit te vormen, waardoor de stator van de synchrone motor rechtstreeks op het net kan worden aangesloten.
De motor start dan als een inductiemotor en wanneer de snelheid de subsynchrone snelheid (95%) bereikt, wordt de extra weerstand losgekoppeld. Het opstarten met frequentieconversie wordt hier niet uitgewerkt. Een van de nadelen van synchrone motoren is dus dat er extra apparatuur nodig is voor het opstarten.
Een synchrone motor werkt op bekrachtigingsstroom. Zonder bekrachtiging is de motor asynchroon. Bekrachtiging is een gelijkstroomsysteem dat op de rotor wordt toegepast, met een rotatiesnelheid en polariteit die overeenkomen met die van de stator.
Als er problemen zijn met de bekrachtiging, zal de motor zijn synchroniteit verliezen, zich niet aanpassen en een beveiligingsmechanisme in werking stellen waardoor de motor uitschakelt wegens "bekrachtigingsfalen". Daarom is een ander nadeel van synchrone motoren de noodzaak van een extra bekrachtigingsapparaat.
Vroeger werd dit rechtstreeks gevoed door een gelijkstroommotor, maar nu wordt het meestal gevoed door thyristorgelijkrichting. Zoals het gezegde luidt: hoe complexer de structuur en hoe meer apparatuur, hoe meer potentiële storingspunten en dus een hoger storingspercentage.
Op basis van de prestatiekenmerken van synchrone motoren zijn hun toepassingen voornamelijk te vinden in takels, slijpmachines, ventilatoren, compressoren, walserijen, waterpompen en andere belastingen.
Samengevat is het principe voor het selecteren van een motor dat, op voorwaarde dat de prestaties van de motor voldoen aan de vereisten van de productiemachine, prioriteit moet worden gegeven aan motoren met eenvoudiger structuren, lagere prijzen, betrouwbare werking en gemakkelijk onderhoud.
In dit opzicht zijn AC-motoren superieur aan DC-motoren, AC-inductiemotoren superieur aan AC-synchrone motoren en eekhoornkooi inductiemotoren superieur aan gewikkelde rotor inductiemotoren.
Voor productiemachines die continu draaien met een constante belasting en geen speciale vereisten hebben voor starten of remmen, is het beter om een standaard inductiemotor met eekhoornkooi te gebruiken, die veel wordt gebruikt in machines, waterpompen, ventilatoren enzovoort.
Productiemachines die vaak moeten starten en stoppen en een hoog start- en remkoppel vereisen, zoals brugkranen, mijntakels, luchtcompressoren en onomkeerbare walsmachines, moeten een inductiemotor met gewikkelde rotor gebruiken.
In gevallen waar geen snelheidsaanpassing nodig is en een constante snelheid of verbetering van de arbeidsfactor vereist is, moeten synchrone motoren worden gebruikt. Deze zijn geschikt voor waterpompen met gemiddelde en grote capaciteit, luchtcompressoren, takels, slijpmachines en nog veel meer.
Voor productiemachines die een snelheidsaanpassingsbereik van meer dan 1:3 vereisen en die een soepele, stabiele snelheidsregeling nodig hebben, wordt het aanbevolen om afzonderlijk bekrachtigde gelijkstroommotoren of inductiemotoren met eekhoornkooi of synchrone motoren met frequentieregeling te gebruiken. Deze zijn geschikt voor grote precisiebewerkingsmachines, portaalschaafmachines, walserijen, takels en nog veel meer.
Productiemachines die een hoog startkoppel en zachte mechanische eigenschappen vereisen, moeten serie- of compoundbekrachtigde gelijkstroommotoren gebruiken. Deze zijn optimaal voor elektrische voertuigen, elektrische locomotieven, zware kranen en nog veel meer.
2. Nominaal vermogen
Het nominaal vermogen van een elektromotor verwijst naar het uitgangsvermogen, ook wel asvermogen of vermogen genoemd, wat een kenmerkende parameter van de motor is. Wanneer mensen vragen naar de grootte van de motor, verwijzen ze meestal naar het nominaal vermogen, niet naar de fysieke afmetingen.
Het nominaal vermogen is de belangrijkste metriek bij het kwantificeren van de belastbaarheid van de motor en is een noodzakelijke parameter bij het selecteren van een motor.
(Waarbij Pn verwijst naar nominaal vermogen, Un verwijst naar nominale spanning, In verwijst naar nominale stroom, cosθ de vermogensfactor is en η het rendement)
Het principe van het kiezen van de juiste motorcapaciteit moet gebaseerd zijn op de premisse dat de motor kan voldoen aan de belastingseisen van de productiemachines, en om het vermogen van de motor op de meest economische en redelijke manier te bepalen.
Als het vermogen te hoog wordt gekozen, zal dit resulteren in een toename van de investering in apparatuur en afval en zal de motor vaak onderbelast draaien, wat resulteert in een laag rendement en een lage vermogensfactor. Omgekeerd, als het vermogen te laag wordt gekozen, zal de motor overbelast draaien, wat leidt tot voortijdige schade.
Er zijn drie hoofdfactoren die het vermogen van een motor bepalen:
1) De opwarming en temperatuurstijging van de motor, die de meest cruciale factor is bij het bepalen van het vermogen van de motor;
2) De kortetermijnoverbelastbaarheid van de motor;
3) Voor asynchrone motoren met eekhoornkooi moet ook rekening worden gehouden met het startvermogen.
Eerst berekent en selecteert de specifieke productiemachine, op basis van de vereisten voor verwarming, temperatuurstijging en belasting, het belastingsvermogen. De motor selecteert dan eerst het nominale vermogen op basis van het belastingsvermogen, de bedrijfscyclus en de vereisten voor overbelasting.
Nadat het nominale vermogen van de motor vooraf is geselecteerd, moet de motor worden gecontroleerd op opwarming, overbelastbaarheid en, indien nodig, startcapaciteit. Als een van deze controles mislukt, moet de motor opnieuw worden geselecteerd en gecontroleerd totdat alle parameters voldoen.
Daarom is het ook noodzakelijk om de bedrijfscyclus op te geven. Als er geen vereisten zijn, wordt de motor verwerkt volgens de meest voorkomende S1-belastingscyclus; motoren met vereisten voor overbelasting moeten ook de overbelastingsveelvouden en de bijbehorende bedrijfstijd opgeven; asynchrone motoren met eekhoornkooi die belastingen met een hoge massatraagheid aandrijven, zoals ventilatoren, moeten ook het massatraagheidsmoment van de belasting en de aanloopkoppelkromme opgeven voor controles van de aanloopcapaciteit.
Alle bovenstaande selecties van nominaal vermogen zijn uitgevoerd onder de veronderstelling van een standaardomgevingstemperatuur van 40°C. Als de omgevingstemperatuur waar de motor werkt verandert, moet het nominaal vermogen van de motor worden herzien.
Op basis van theoretische berekeningen en de praktijk kan het vermogen van de motor bij verschillende omgevingstemperaturen ruwweg toe- of afnemen volgens onderstaande tabel.
Daarom moet in gebieden met een streng klimaat ook de omgevingstemperatuur worden opgegeven. In India moet de omgevingstemperatuur bijvoorbeeld worden gecontroleerd op 50°C.
Hoe hoger de hoogte, hoe groter de temperatuurstijging van de motor en hoe kleiner het uitgangsvermogen. Motoren die op grote hoogte worden gebruikt, moeten ook rekening houden met de effecten van corona-ontlading.
Wat het huidige marktbereik van motorvermogen betreft, geef ik ter referentie de volgende gegevens uit de prestatietabel van mijn bedrijf:
- Gelijkstroommotor: ZD9350 (slijpmachine) 9350kW
- Asynchrone motor: Eekhoornkooi type YGF1120-4 (Hoogovenventilator) 28000kW
- Gewonden rotortype YRKK1000-6 (grondstoffenslijpmachine) 7400kW
- Synchrone motor: TWS36000-4 (Hoogovenventilator) 36000kW (een testeenheid bereikte 40000kW)
3. Nominale spanning
De nominale spanning van een motor verwijst naar de lijnspanning onder de nominale bedrijfsomstandigheden. De keuze van de nominale spanning van de motor hangt af van de voedingsspanning van het voedingssysteem naar de faciliteit en de capaciteit van de motor.
De selectie van de nominale spanning voor wisselstroommotoren hangt voornamelijk af van de voedingsspanning op de plaats van gebruik. Het gebruikelijke laagspanningsnet is 380 V, dus de nominale spanning is meestal 380 V (Y- of Δ-aansluiting), 220/380 V (Δ/Y-aansluiting) of 380/660 V (Δ/Y-aansluiting).
Wanneer het vermogen van laagspanningsmotoren een bepaald niveau bereikt (zoals 300KW/380V), wordt het moeilijk of te duur om de stroom te verhogen vanwege de beperking van de capaciteit van de draad.
In dergelijke gevallen is het noodzakelijk om een hoog vermogen te bereiken door de spanning te verhogen. De gebruikelijke voedingsspanning voor het hoogspanningsnetwerk is 6000V of 10000V, maar in het buitenland zijn er ook spanningsniveaus van 3300V, 6600V en 11000V.
Hoogspanningsmotoren hebben het voordeel van een hoog vermogen en een grote schokbestendigheid. Ze hebben echter ook het nadeel van een hoge inertie, waardoor ze moeilijk te starten en af te remmen zijn.
De nominale spanning van een gelijkstroommotor moet ook overeenkomen met de bronspanning. Over het algemeen is dat 110V, 220V of 440V. De meest gebruikte spanning is 220V, maar voor motoren met een hoog vermogen kan deze worden verhoogd tot 600-1000V.
Als de wisselstroombron 380 V is en er een driefasige bruggestuurde siliciumgelijkrichter wordt gebruikt voor de voeding, moet de nominale spanning van de gelijkstroommotor worden ingesteld op 440 V. Als deze wordt gevoed door een driefasige, halfgolvige, bestuurbare siliciumgelijkrichter, moet de nominale spanning van de gelijkstroommotor 220V zijn.
4. Nominale snelheid
De nominale snelheid van een elektromotor verwijst naar zijn snelheid onder bepaalde operationele omstandigheden.
Zowel de elektromotor als de machines die hij aandrijft hebben hun eigen nominale snelheden. Bij het kiezen van de snelheid van een elektromotor moet je bedenken dat een te lage snelheid niet wenselijk is. Hoe lager de nominale snelheid van een elektromotor, hoe meer fasen hij heeft, wat resulteert in een grotere omvang en hogere kosten.
Tegelijkertijd mag de snelheid van de elektromotor niet te hoog zijn, omdat dit het transmissiemechanisme zou compliceren en het moeilijk te onderhouden zou maken.
Bovendien is het koppel van de motor bij een vast vermogen omgekeerd evenredig met de snelheid.
Voor degenen met lage opstart- en remvereisten kan een uitgebreide vergelijking worden gemaakt vanuit het oogpunt van initiële investering, ruimtebeslag en onderhoudskosten door verschillende nominale snelheden te overwegen, waarna de uiteindelijke nominale snelheid kan worden bepaald.
Voor diegenen die vaak starten, remmen en achteruitrijden, maar waarbij de overgangstijd weinig invloed heeft op de productiviteit, worden de snelheidsverhouding en nominale snelheid van de elektromotor voornamelijk gekozen om de verliezen in het overgangsproces te minimaliseren, naast de initiële investering. Liftmotoren bijvoorbeeld, die vaak moeten worden omgekeerd en een hoog koppel hebben, hebben een laag toerental. Dit resulteert in een grote motoromvang en hoge kosten.
Wanneer het motortoerental hoog is, moet men ook rekening houden met het kritieke toerental van de motor. Elke motorrotor trilt tijdens bedrijf en de amplitude van de rotor neemt toe met de snelheid.
Bij een bepaalde snelheid bereikt de amplitude zijn maximum (ook bekend als resonantie), en voorbij deze snelheid neemt de amplitude geleidelijk af met toenemende snelheid en stabiliseert binnen een bepaald bereik. Deze snelheid, waarbij de rotoramplitude maximaal is, staat bekend als de kritieke snelheid van de rotor.
Deze snelheid is gelijk aan de natuurlijke frequentie van de rotor. Als de snelheid blijft toenemen en tweemaal de natuurlijke frequentie nadert, neemt de amplitude weer toe. De snelheid die gelijk is aan twee keer de natuurlijke frequentie wordt de kritische snelheid van de tweede orde genoemd. Dit gaat verder met de derde orde, vierde orde enzovoort.
Als de rotor op het kritieke toerental draait, zullen er ernstige trillingen optreden en zal de buiging van de as duidelijk toenemen, wat na verloop van tijd kan leiden tot ernstige buigvervorming of zelfs breuk van de as. Het kritische toerental van de eerste orde van een motor ligt over het algemeen boven 1500 tpm, dus de impact van het kritische toerental wordt meestal niet in aanmerking genomen voor conventionele motoren met een laag toerental.
Voor 2-polige hogesnelheidsmotoren, met een nominaal toerental in de buurt van 3000 rpm, moet daarentegen rekening worden gehouden met de invloed van dit effect en mag de motor niet gedurende langere tijd op het kritieke toerental draaien.
Over het algemeen kunnen het type belasting dat wordt aangedreven, het nominale vermogen, de nominale spanning en de nominale snelheid van de motor ruwweg de motor bepalen.
Als je echter optimaal wilt voldoen aan de belastingseisen, zijn deze basisparameters bij lange na niet genoeg.
Aanvullende parameters die nodig zijn, zijn frequentie, bedrijfscyclus, vereisten voor overbelasting, isolatieklasse, beschermingsklasse, rotatietraagheid, belastingskoppelkromme, installatiemethode, omgevingstemperatuur, hoogte, vereisten voor buitenopstelling, enzovoort, afhankelijk van specifieke omstandigheden.
IV. Onderhoud van de motor
In geval van werking of storing van de motor kunnen vier methoden worden gebruikt om het probleem te voorkomen en tijdig te verhelpen, zodat de veilige werking van de motor wordt gegarandeerd.
1. Kijk op
Let op eventuele afwijkingen tijdens de werking van de motor, die voornamelijk worden aangegeven door de volgende scenario's:
1). Als er kortsluiting optreedt in de statorwikkeling, kan de motor rook produceren.
2). Als de motor onder zware overbelasting of fase-uitval werkt, zal de snelheid afnemen en zal er een luid "zoemend" geluid te horen zijn.
3). Als het onderhoudsnetwerk van de motor normaal werkt maar plotseling stopt, kunnen er vonken worden waargenomen op losse onderdelen van de bedrading. Dit kan het gevolg zijn van een doorgebrande zekering of een vastzittend onderdeel.
4). Als de motor overmatig trilt, kan dit te wijten zijn aan een vastzittend overbrengingsmechanisme, een slechte bevestiging van de motor of een loszittende voetbout.
5). Verkleuring, brandplekken en rookvlekken op de interne contacten en aansluitingen van de motor kunnen wijzen op plaatselijke oververhitting, slecht contact op de geleideraansluitingen of doorbranden van de wikkeling.
2. Luister naar
De motor moet tijdens normaal bedrijf een gelijkmatig en licht "zoemend" geluid maken, zonder bijgeluiden of speciale geluiden. Als het geluidsniveau te hoog is, met inbegrip van elektromagnetische, lager-, ventilatie-, mechanische wrijving, enz. kan dit wijzen op een mogelijk probleem of storing.
(1) Voor elektromagnetische ruis, als de motor een hard en zwaar geluid produceert, zijn de mogelijke oorzaken:
- Ongelijke luchtspleet tussen de stator en de rotor, wat resulteert in hoge en lage geluiden met een consistente interval. Dit kan worden veroorzaakt door slijtage van de lagers, waardoor de stator en de rotor niet in het midden staan.
- Ongebalanceerde driefasenstroom, wat kan worden veroorzaakt door onjuiste aarding, kortsluiting of slecht contact van de driefasige wikkeling. Als het geluid dof is, kan dit erop wijzen dat de motor aanzienlijk overbelast is of uit fase werkt.
- Loszittende ijzeren kern, veroorzaakt door trillingen die de bevestigingsbouten van de ijzeren kern losmaken, wat resulteert in lawaai door het loskomen van de ijzeren kern. silicium staalplaat.
(2) Controleer regelmatig het geluid van de lagers tijdens de werking van de motor. Dit kan worden gedaan door het ene uiteinde van een schroevendraaier tegen de lagerinstallatie en houd het andere uiteinde dicht bij het oor om naar het lopende geluid te luisteren.
Als het lager normaal werkt, moet het een continu en klein "ruisend" geluid produceren, zonder veranderingen van hoog naar laag of metaalwrijvingsgeluiden.
- Een "piepend" geluid duidt op metaalwrijving, meestal veroorzaakt door een gebrek aan olie in het lager. Het lager moet worden gedemonteerd en bijgevuld met een geschikte hoeveelheid vet.
- Een "pompend" geluid is het resultaat van kogelrotatie, meestal veroorzaakt door droog vet of een tekort aan olie. Indien nodig kan meer vet worden toegevoegd.
- Een "klikkend" of "krakend" geluid is te wijten aan een onregelmatige beweging van de kogel in het lager, veroorzaakt door een beschadiging van de kogel of het opdrogen van het smeervet na een lange periode van inactiviteit.
(3) Indien het transmissiemechanisme en het aangedreven mechanisme een continu en geen onzeker geluid voortbrengen, kan dit worden veroorzaakt door het volgende:
- Een periodiek "knappend" geluid wordt veroorzaakt door een niet-soepele riemverbinding.
- Een periodiek "bonkend" geluid wordt veroorzaakt door loszittende koppelingen of poelies op de as, of slijtage van de spie of het spiebaan.
3. Ruik
Storingen in een motor kunnen worden opgespoord en voorkomen door gebruik te maken van de reukzin.
Om te controleren op storingen opent u de aansluitdoos en ruikt u of er verbrande of ongewone geuren aanwezig zijn.
Als er een verfgeur hangt, kan dit erop wijzen dat de interne temperatuur van de motor te hoog is.
Als er een sterke, doordringende geur of een verbrande geur aanwezig is, kan dit erop wijzen dat de isolatie of wikkeling beschadigd is.
Zelfs als er geen merkbare geur is, is het nog steeds belangrijk om de isolatieweerstand tussen de wikkeling en het omhulsel te meten met een megger.
Als de isolatieweerstand lager is dan 0,5 biljoen ohm, moet de motor worden gedroogd. Een weerstandswaarde van nul geeft aan dat de motor beschadigd is.
4. Raak aan
Het aanraken van de temperatuur van verschillende onderdelen van de motor kan ook helpen bij het diagnosticeren van storingen.
Om veiligheidsredenen kun je bij het controleren van de temperatuur het beste de rug van je hand gebruiken om het motorhuis en de onderdelen in de buurt van het lager aan te raken.
Als er een abnormale temperatuur wordt gedetecteerd, kan dit verschillende oorzaken hebben, zoals:
- Slechte ventilatie, bijvoorbeeld als de ventilator is uitgevallen of het ventilatiekanaal geblokkeerd is.
- Oververhitting van de statorwikkeling door te hoge stroom.
- Fout in kortsluiting tussen de wikkelingen van de stator of onbalans in driefasenstroom.
- Vaak starten of remmen.
Als de temperatuur rond het lager te hoog is, kan dit worden veroorzaakt door schade aan het lager of een tekort aan smeerolie.
Regelgeving voor motor lagertemperatuur en oorzaken van abnormaal zijn en oplossingen
Volgens de voorschriften mag de maximumtemperatuur van wentellagers niet hoger zijn dan 95℃ en de maximumtemperatuur van glijlagers niet hoger dan 80℃, met een temperatuurstijging van niet meer dan 55℃ (berekend als het verschil tussen de temperatuur van het lager en de omgevingstemperatuur tijdens het testen).
Mogelijke oorzaken en oplossingen voor overmatige temperatuurstijging in lagers zijn onder andere:
- Verbogen as of onnauwkeurige middellijn - lijn het middelpunt opnieuw uit.
- Losse funderingsschroeven - draai de schroeven vast.
- Vuile smeerolie - vervang de olie.
- Oud smeerolie - Maak het lager schoon en vervang de olie.
- Beschadigde kogel of rol in het lager - vervang het lager.
Voor het gedeelte over oplossingen moeten de volgende herzieningen worden aangebracht:
- Vervang de beschadigde onderdelen (zekering, laadweerstand, enz.) in de module door de afdekplaat te openen.
- Vervang eventueel beschadigde lichtgevende dochterkaarten of beschermende diodes.
- Controleer of de optische vezel goed is aangesloten zoals aangegeven en vervang deze als deze beschadigd is.
- Vervang de voedingskaart van de module.