Motortypen en -principes in de productie verkennen
Stel je de wereld eens voor zonder het gezoem van motoren - geen auto's, geen apparaten, geen industriële machines. Motoren zetten elektrische energie om in mechanische energie en drijven alles aan, van speelgoed tot productiereuzen. In dit artikel verkennen we verschillende motortypen, hun werkingsprincipes en hun toepassingen. Door deze basisprincipes te begrijpen, krijgt u inzicht in hoe deze onmisbare apparaten ons moderne leven vormgeven en welke innovaties ze aandrijven in het industriële landschap.
Bijna de helft van het wereldwijde energieverbruik wordt toegeschreven aan motoren, waardoor het efficiënte gebruik van motoren een van de meest effectieve maatregelen is om wereldwijde energieproblemen aan te pakken.
Een motor is een apparaat dat elektrische energie omzet in mechanische energie. Het maakt gebruik van een aangedreven spoel (de statorwikkeling) om een roterend magnetisch veld op te wekken, dat inwerkt op de rotor (zoals een gesloten aluminium frame met eekhoornkooi) om een roterend magnetisch koppel te creëren.
Motoren worden onderverdeeld in gelijkstroommotoren (DC) en wisselstroommotoren (AC) op basis van het type voeding dat wordt gebruikt. De meeste motoren in het elektriciteitssysteem zijn wisselstroommotoren, die synchroon of asynchroon kunnen zijn (de rotatiesnelheid van het magnetische veld van de stator van de motor is niet gesynchroniseerd met de rotatiesnelheid van de rotor).
Een motor bestaat voornamelijk uit een stator en een rotor. De bewegingsrichting van de aangedreven geleider in het magnetische veld is gerelateerd aan de richting van de stroom en de richting van de magnetische veldlijnen. Het werkingsprincipe van een motor is de kracht van het magnetische veld op de stroom, waardoor de motor gaat draaien.
Motorbesturing verwijst naar de besturing van de start, acceleratie, werking, vertraging en stop van de motor. Er zijn verschillende vereisten en doelstellingen, afhankelijk van het type motor en de omstandigheden waarin de motor wordt gebruikt. Voor motoren worden met motorbesturing de doelen van snel starten, snel reageren, hoog rendement, hoog koppel en hoge overbelastbaarheid bereikt.
De hier genoemde standaardmotoren, servomotoren, stappenmotoren en servomotoren verwijzen naar DC micromotoren, die we vaak tegenkomen. Een motor, ook wel "motor" genoemd, verwijst naar dit elektromagnetische inductieapparaat dat de transformatie of overdracht van elektromagnetische energie handhaaft volgens de wet van Faraday van elektromagnetische inductie.
Een motor, ook wel "elektrische machine" genoemd, wordt in het stroomcircuit weergegeven door de Engelse letter "M" (vroeger weergegeven door "D"). Zijn belangrijkste functie is het genereren van een aandrijfkoppel als krachtbron voor elektrische apparaten of verschillende machines. Een generator wordt in het circuit voorgesteld door de letter "G".
1. Soorten motoren
Over het algemeen verwijzen motoren naar apparaten die de kracht die wordt opgewekt door de stroom van elektrische stroom in een magnetisch veld omzetten in een roterende beweging, en in bredere zin ook in een lineaire beweging.
Motoren kunnen op basis van hun krachtbron in twee categorieën worden ingedeeld: Gelijkstroommotoren en wisselstroommotoren.
Ze kunnen ook grofweg worden gecategoriseerd op basis van hun rotatieprincipes, met een paar uitzonderingen voor speciale soorten motoren.
(1) Gelijkstroommotor
Geborstelde motor
De veelgebruikte borstelmotor wordt over het algemeen een gelijkstroommotor genoemd. De rotor draait door de stroom te schakelen door elektroden die "borstels" worden genoemd (aan de statorzijde) en een "commutator" (aan de ankerzijde).
Borstelloze gelijkstroommotor
Deze motor heeft geen borstels of commutator nodig, maar gebruikt in plaats daarvan schakelfuncties zoals transistors om stromen te schakelen en de motor te laten draaien.
Stappenmotor
Deze motor werkt synchroon met pulsvermogen en wordt daarom ook wel pulsmotor genoemd. Het kenmerk is eenvoudige en nauwkeurige positionering.
(2) AC-motor
Asynchrone motor
De wisselstroom zorgt ervoor dat de stator een roterend magnetisch veld produceert, waardoor de rotor een geïnduceerde stroom produceert en onder invloed van de wisselstroom roteert.
Synchrone motor
AC creëert een roterend magnetisch veld en de rotor met het magnetische veld roteert door aantrekkingskracht. De rotatiesnelheid wordt gesynchroniseerd met de netfrequentie.
Over elektrische stroom, magnetische velden en kracht
Laten we, om de uitleg van de motorprincipes te vergemakkelijken, eerst de basiswetten van elektrische stroom, magnetische velden en kracht doornemen. Hoewel het een gevoel van nostalgie met zich meebrengt, is het gemakkelijk om deze kennis te vergeten als je niet vaak magnetische componenten gebruikt.
We zullen afbeeldingen en formules gebruiken om dit te illustreren.
Schematisch diagram van motoromwenteling
Wanneer de draadlus een rechthoek is, moeten we rekening houden met de kracht die op de stroom werkt.
De kracht F die op de zijden a en c werkt, kan worden berekend met de volgende formule:
Dit veroorzaakt een koppel rond de centrale as.
Als we bijvoorbeeld kijken naar de toestand waarin de draaihoek slechts θ is, dan is de kracht die op b en d werkt onder een rechte hoek sinθ. Daarom kan het koppel Ta op de zijde a worden uitgedrukt met de volgende formule:
Op dezelfde manier, rekening houdend met de zijde c, verdubbelt het koppel en genereert het een koppel dat wordt berekend met de volgende formule:
Aangezien de oppervlakte van de rechthoek S = h x l is, levert substitutie in de bovenstaande formule de volgende resultaten op:
Deze formule is niet alleen van toepassing op rechthoeken, maar ook op andere veel voorkomende vormen zoals cirkels. Motoren maken gebruik van dit principe.
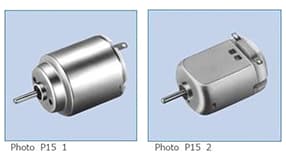
Standaard motor
Een standaardmotor, die vaak voorkomt in alledaagse voorwerpen zoals elektrisch speelgoed en elektrische scheerapparaten, is meestal een gelijkstroommotor met borstels. Hij wordt gekenmerkt door een hoge snelheid en een laag koppel en heeft slechts twee pinnen nodig om te werken. Wanneer de motor wordt aangesloten op de positieve en negatieve pool van een batterij, begint hij te draaien. Als je de aansluiting omdraait, gaat de motor in de tegenovergestelde richting draaien.
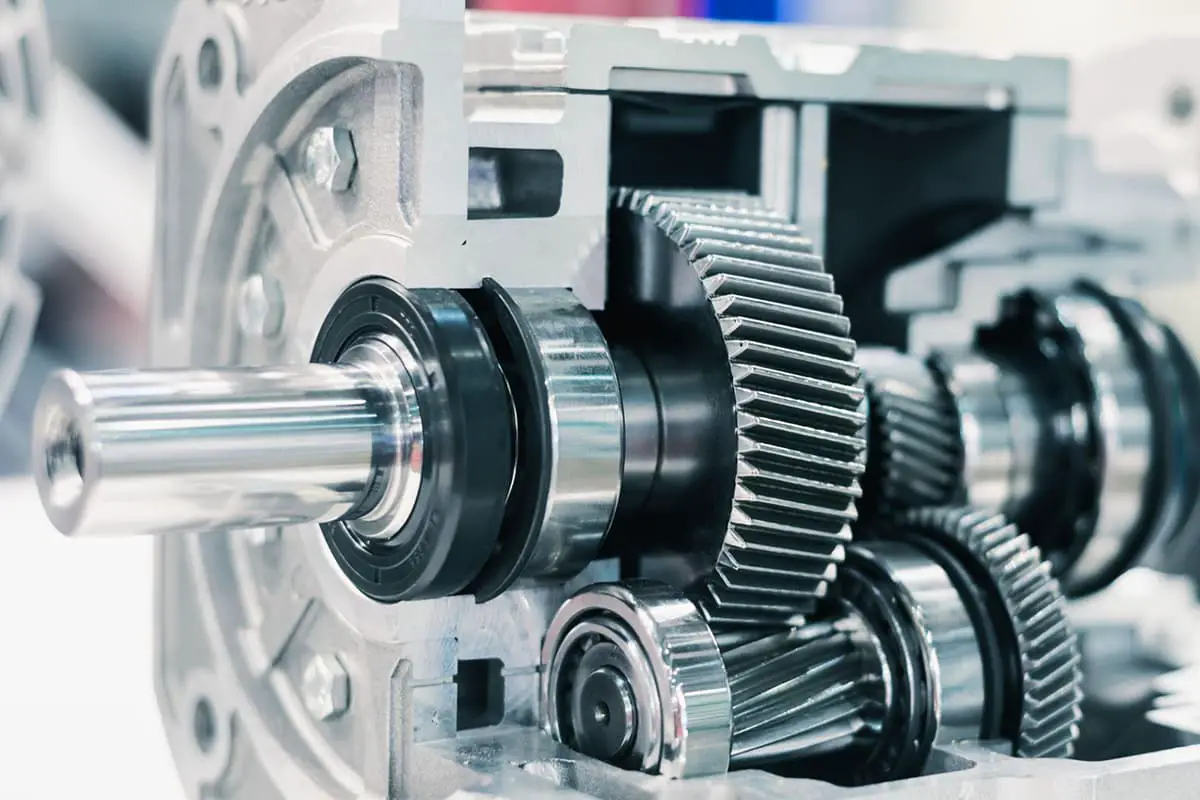
Motor tandwielreductie
Een motor met tandwielreductie is een standaardmotor die is uitgerust met een tandwielkast. Dit ontwerp verlaagt de rotatiesnelheid terwijl het koppel toeneemt, waardoor het aantal praktische toepassingen voor de standaardmotor toeneemt.
Servomotor
Een servomotor bestaat voornamelijk uit een omhulsel, een printplaat, een kernloze motor, tandwielen en een positiedetector. Hij werkt door een signaal te ontvangen van de ontvanger naar de servomotor. Het ingebouwde IC bepaalt de draairichting en drijft de kernloze motor aan om te beginnen draaien.
De beweging wordt via de reductietandwielen doorgegeven aan de zwenkarm en de positiedetector stuurt tegelijkertijd signalen terug om te controleren of de bedoelde positie is bereikt. De positiedetector is in wezen een variabele weerstand die van weerstandswaarde verandert als de servomotor draait. Door deze weerstandswaarden te detecteren, kan de draaihoek worden bepaald.
Specificaties geleverd door fabrikanten van servomotoren omvatten meestal afmetingen (mm), koppel (kg/cm), snelheid (sec/60°), testspanning (V) en gewicht (g). De eenheid van koppel is kg/cm, wat aangeeft hoeveel kilogram kan worden opgetild bij een zwenkarmlengte van 1 cm.
Dit is het concept van een hefboomarm, dus hoe langer de arm, hoe lager het koppel. De eenheid van snelheid is sec/60°, wat staat voor de tijd die de servomotor nodig heeft om 60° te draaien.
Stappenmotor
Een stappenmotor is een open-lus regelelement dat elektrische pulssignalen omzet in hoekverplaatsingen of lineaire verplaatsingen. In omstandigheden zonder overbelasting zijn de snelheid en de stoppositie van de motor uitsluitend afhankelijk van de frequentie en het aantal pulssignalen, ongeacht veranderingen in de belasting.
Wanneer een stappenstuurprogramma een pulssignaal ontvangt, stuurt het de stappenmotor aan om een vaste hoek, de "staphoek", in een vooraf bepaalde richting te draaien. De rotatie verloopt in stappen van een vaste hoek. Het aantal pulsen kan worden geregeld om de hoekverplaatsing te beheren, waardoor een nauwkeurige positionering wordt bereikt. Op dezelfde manier kan de pulsfrequentie worden gebruikt om de rotatiesnelheid en versnelling van de motor te regelen, zodat de snelheid wordt geregeld.
Een servomotor, ook bekend als een actuatormotor, dient als een uitvoerende eenheid in automatische besturingssystemen en zet de ontvangen elektrische signalen om in een hoekverplaatsing of hoeksnelheid op de motoras.
Er zijn twee hoofdcategorieën: gelijkstroommotoren (DC) en wisselstroommotoren (AC). Het belangrijkste kenmerk van deze motoren is dat er geen zelfrotatiefenomeen optreedt wanneer de signaalspanning nul is en dat de rotatiesnelheid gelijkmatig afneemt naarmate het koppel toeneemt.
Servomotoren vertrouwen voornamelijk op pulsen voor positionering. In wezen draait de servomotor voor elke ontvangen puls een hoek die overeenkomt met de puls, waardoor verplaatsing wordt bereikt. Aangezien de servomotor zelf pulsen kan afgeven, geeft hij een overeenkomstig aantal pulsen af voor elke graad die hij draait.
Dit vormt een responsief of 'gesloten lus'-systeem met de ontvangen pulsen. Op deze manier weet het systeem hoeveel pulsen er naar de servomotor zijn gestuurd en hoeveel pulsen er zijn terugontvangen. Hierdoor kan de rotatie van de motor zeer nauwkeurig worden geregeld, waardoor een nauwkeurige positionering tot 0,001 mm mogelijk is.
Servomotoren worden grofweg onderverdeeld in AC servo en DC servo categorieën.
AC-servomotoren worden verder onderverdeeld in asynchrone AC-servomotoren en synchrone AC-servomotoren.
DC-servomotoren worden onderverdeeld in borstelmotoren en borstelloze motoren. Borstelmotoren zijn goedkoop, eenvoudig van structuur, produceren een hoog startkoppel, hebben een breed snelheidsregelbereik en zijn gemakkelijk te besturen. Ze vereisen onderhoud, maar dat is lastig (bijv. borstelvervanging) en ze produceren elektromagnetische interferentie en hebben specifieke omgevingsvereisten. Daarom zijn ze geschikt voor kostengevoelige algemene industriële en civiele toepassingen.
2. Hoe draaien motoren?
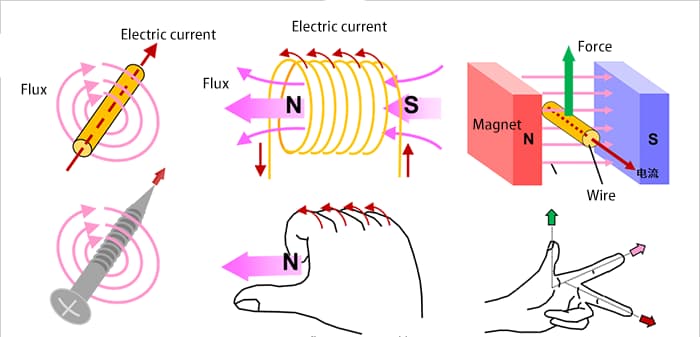
1)Motoren draaien met behulp van magneten en magnetische kracht
Rond een permanente magneet met een draaiende as,
① De magneet draaien (om een roterend magnetisch veld te produceren),
② Volgens het principe van tegengestelde polen trekken elkaar aan en stoten dezelfde polen elkaar af tussen de N-pool en de S-pool,
③ De magneet met de draaiende as gaat draaien.
Dit is het basisprincipe van motorrotatie.
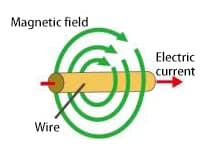
De stroom door een draad genereert een roterend magnetisch veld (magnetische kracht) eromheen, waardoor de magneet gaat draaien.
In feite is dit dezelfde operationele toestand als eerder beschreven.
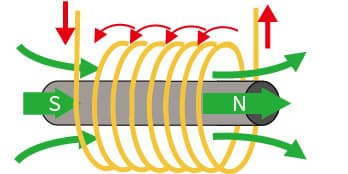
Als de draad bovendien in een spoel wordt gewikkeld, worden de magnetische krachten gecombineerd om een grote magnetische veldstroom (magnetische flux) te vormen, die N- en S-polen produceert.
Door een ijzeren kern in de spoelvormige draad aan te brengen, kunnen de magnetische veldlijnen er gemakkelijker doorheen en wordt er een sterkere magnetische kracht opgewekt.
2)Praktische roterende motoren
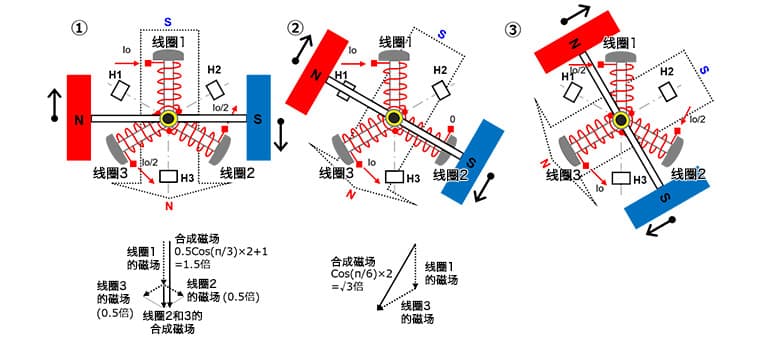
Hier introduceren we de praktische methode om driefasige wisselstroom en spoelen te gebruiken om een roterend magnetisch veld te produceren als een roterende motor.
(Driefasig wisselstroom is een wisselstroomsignaal met een faseverschil van 120°).
Het gecombineerde magnetische veld in de bovenstaande toestand ① komt overeen met de figuur ① hieronder.
Het gecombineerde magnetische veld in de bovenstaande toestand ② komt overeen met de figuur ② hieronder.
Het gecombineerde magnetische veld in de bovenstaande toestand ③ komt overeen met de figuur ③ hieronder.
Zoals hierboven vermeld, is de spoel die om de ijzeren kern gewikkeld is verdeeld in drie fasen, met een U-fase spoel, V-fase spoel en W-fase spoel gerangschikt met een interval van 120°.
De spoel met hoge spanning genereert een N-pool, terwijl de spoel met lage spanning een S-pool genereert.
Elke fase verandert volgens een sinusgolf, dus de polariteit (N-pool, S-pool) en het magnetische veld (de magnetische kracht) van elke spoel zullen veranderen.
Als we op dit moment naar de spoel kijken die een N-pool produceert, verandert deze achtereenvolgens van U-fasespoel naar V-fasespoel naar W-fasespoel naar U-fasespoel, waardoor rotatie ontstaat.
3. Structuur van kleine motoren
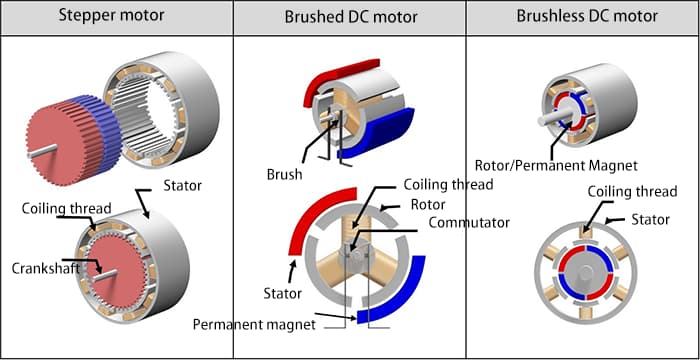
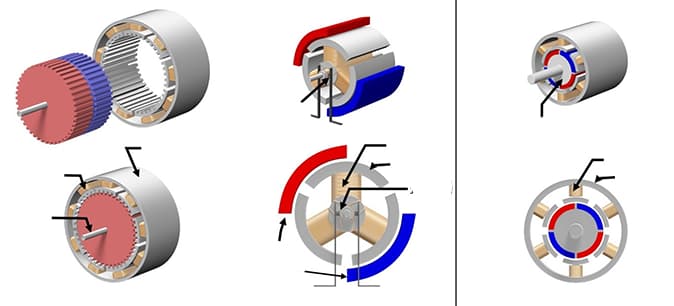
De volgende figuur toont de benaderende structuren en vergelijkingen van drie motortypen: de stappenmotor, de geborstelde gelijkstroommotor en de borstelloze gelijkstroommotor.
De basiscomponenten van deze motoren zijn voornamelijk spoelen, magneten en rotors, en ze worden geclassificeerd als spoel-vast type en magneet-vast type vanwege hun verschillende types.
Het volgende is een structurele uitleg met betrekking tot het voorbeelddiagram. Aangezien er andere structuren kunnen zijn als we ze fijner onderverdelen, moet u begrijpen dat dit artikel de algemene structuur beschrijft.
In de stappenmotor die hier is afgebeeld, is de spoel aan de buitenkant gefixeerd en draait de magneet aan de binnenkant.
In de geborstelde gelijkstroommotor die we hier zien, zit de magneet vast aan de buitenkant en draait de spoel aan de binnenkant. De borstels en de commutator zijn verantwoordelijk voor het leveren van stroom aan de spoel en het veranderen van de richting van de stroom.
In de borstelloze motor die hier wordt getoond, is de spoel aan de buitenkant bevestigd en draait de magneet aan de binnenkant.
Vanwege de verschillende motortypen kan de structuur verschillen, ook al zijn de basiscomponenten hetzelfde. In elk hoofdstuk wordt een gedetailleerde uitleg gegeven.
4. Geborstelde motor
Structuur van borstelmotor
Hieronder zie je het uiterlijk van een geborstelde gelijkstroommotor die vaak in modellen wordt gebruikt, evenals een explosiediagram van een typische tweepolige (2 magneten) en driedelige (3 spoelen) motor. Veel mensen hebben ervaring met het demonteren van motoren en het verwijderen van magneten.
Zoals te zien is, is de permanente magneet van een geborstelde gelijkstroommotor vast en kunnen de spoelen rond het interne centrum van de motor draaien. De vaste kant wordt de "stator" genoemd, terwijl de roterende kant de "rotor" wordt genoemd.
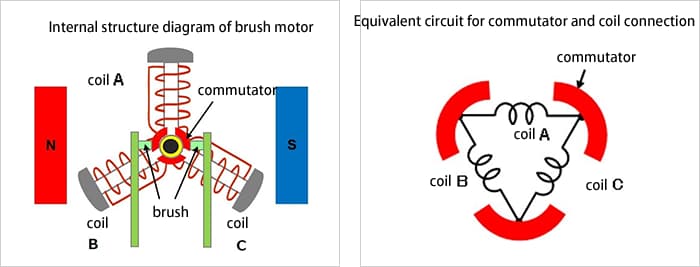
Hieronder ziet u een schematisch diagram dat de structuur van de motor weergeeft.
Er zijn drie commutators (gebogen metalen platen voor het schakelen van de stroom) aan de omtrek van de draaiende centrale as. Om te voorkomen dat ze elkaar raken, zijn de commutators op intervallen van 120 graden (360 graden ÷ 3) geplaatst. De commutators draaien mee met de rotatie van de as.
Elke commutator is verbonden met één spoeluiteinde en een ander spoeluiteinde, en de drie commutators en drie spoelen vormen samen een circuitnetwerk (ringvormig).
Twee borstels zijn vastgezet op 0° en 180° om contact te maken met de commutators. De externe gelijkstroomvoeding wordt aangesloten op de borstels en de stroom vloeit langs het pad van borstel → commutator → spoel → borstel.
Werkingsprincipe van een borstelmotor.
① Rotatie linksom vanuit begintoestand
In de begintoestand bevindt spoel A zich bovenaan en is de voeding aangesloten op de borstels met de linker (+) en rechter (-) zijde gedefinieerd. Er vloeit een grote stroom van de linker borstel door de commutator naar spoel A, en de bovenste (buitenste) zijde van spoel A wordt een S-poolstructuur.
Omdat de helft van de stroom die door spoel A loopt vanaf de linker borstel naar spoelen B en C in de tegenovergestelde richting is van die van spoel A, wordt de buitenkant van spoelen B en C een zwakkere N-pool (weergegeven met kleinere letters in het diagram).
De magnetische velden die in deze spoelen worden gegenereerd en de afstoting en aantrekking tussen de magneten zorgen ervoor dat de spoel linksom draait.
② Verder linksom draaien
Ervan uitgaande dat spoel A 30 graden linksom draait, maakt de rechterborstel contact met twee commutators.
De stroom in spoel A blijft van de linker borstel door de rechter borstel lopen en de buitenkant van spoel A blijft een S-pool.
Dezelfde stroom als in spoel A stroomt door spoel B, en de buitenkant van spoel B wordt een sterkere N-pool.
Omdat beide uiteinden van spoel C zijn kortgesloten door de borstels, loopt er geen stroom en wordt er geen magnetisch veld opgewekt.
Zelfs in dit geval wordt de spoel onderworpen aan een rotatiekracht tegen de wijzers van de klok in.
Van ③ tot ④ blijft er een linkse kracht op de bovenste spoel en een rechtse kracht op de onderste spoel, waardoor deze tegen de klok in blijft draaien.
Telkens als de spoel 30 graden draait naar de toestanden ③ en ④, wordt de buitenkant van de spoel een S-pool als de spoel zich boven de middelste horizontale as bevindt, en een N-pool als de spoel zich eronder bevindt, waarbij deze beweging herhaaldelijk wordt uitgevoerd.
Met andere woorden, de bovenste spoel ontvangt herhaaldelijk een kracht naar links en de onderste spoel ontvangt herhaaldelijk een kracht naar rechts (beide tegen de wijzers van de klok in). Hierdoor draait de rotor continu tegen de wijzers van de klok in.
Als de voeding wordt aangesloten op de tegenoverliggende linkerborstel (-) en rechterborstel (+), genereert de spoel een magnetisch veld in de tegenovergestelde richting en wordt de krachtrichting die op de spoel wordt uitgeoefend omgekeerd, waardoor rotatie met de wijzers van de klok mee wordt veroorzaakt.
Bovendien stopt de rotor van de borstelmotor met draaien als de voeding wordt onderbroken, omdat er geen magnetisch veld is om de rotor te laten draaien.
5. Driefasige borstelloze motor met volledige golving
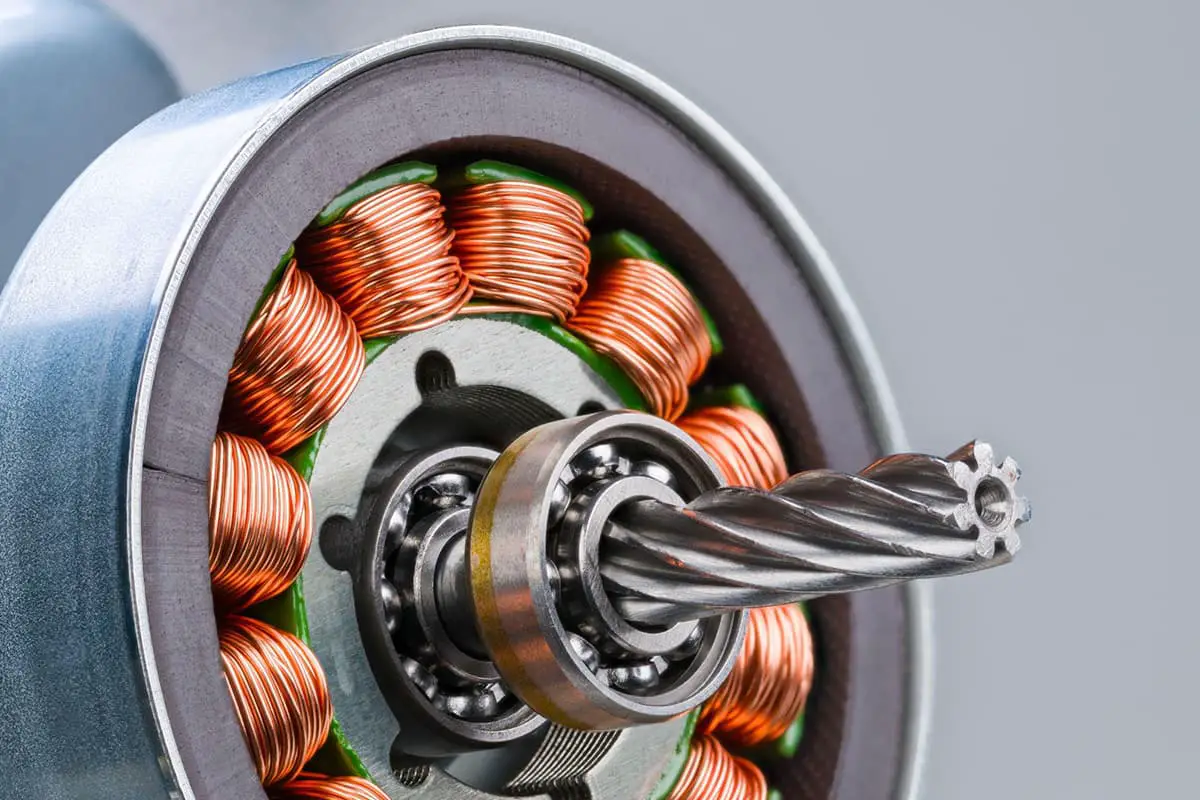
Uiterlijk en structuur van driefasen borstelloze motor met volle golf
De volgende afbeelding toont een voorbeeld van het uiterlijk en de structuur van een borstelloze motor.
Links zie je een voorbeeld van een spindelmotor voor het draaien van schijven in een apparaat voor het afspelen van schijven. Er zijn in totaal negen spoelen, bestaande uit drie fasen maal drie.
Rechts zie je een voorbeeld van een spindelmotor voor een FDD-apparaat, die 12 spoelen heeft (drie fasen maal vier). De spoelen zijn bevestigd op de printplaat en gewikkeld rond een ijzeren kern.
De schijfvormige component rechts van de spoel is een rotor met permanente magneet. De buitenrand is gemaakt van een permanente magneet en de rotoras is in het midden van de spoel gestoken en bedekt een deel ervan. De permanente magneet draait rond de buitenrand van de spoel.
Het interne structuurschema van een driefasen borstelloze motor met volle golf en het equivalente circuit voor spoelverbindingen.
Hieronder volgen vereenvoudigde schema's van de interne structuur en het equivalente circuit voor spoelaansluitingen.
Het vereenvoudigde schema toont een 2-polige (2 magneten) 3-sleuven (3 spoelen) motor met een eenvoudige structuur. Hij lijkt op een geborstelde motorstructuur met hetzelfde aantal polen en gleuven, maar de spoelzijde is vast terwijl de magneten kunnen draaien. Natuurlijk zijn er geen borstels.
In dit geval zijn de spoelen in een Y-vormige configuratie aangesloten en worden halfgeleidercomponenten gebruikt om de spoelen van stroom te voorzien. De stroom wordt geregeld op basis van de positie van de roterende magneten.
In dit voorbeeld worden Hall-elementen gebruikt om de positie van de magneten te detecteren. De Hall-elementen worden tussen de spoelen geplaatst en detecteren de spanning die wordt opgewekt door de magnetische veldsterkte, die wordt gebruikt als positie-informatie. In de eerder geleverde afbeelding van de spindelmotor voor het FDD-apparaat zijn ook Hall-elementen te zien tussen de spoelen voor positiedetectie (boven de spoelen).
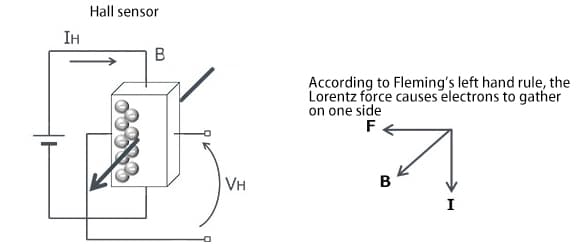
Hall-elementen zijn bekende magnetische sensoren die de grootte van het magnetische veld omzetten in de grootte van de spanning en de richting van het magnetische veld weergeven met een positieve of negatieve spanning.
Hieronder staat een schematische weergave van het Hall-effect.
Het Hall-element maakt gebruik van het fenomeen dat "wanneer een stroom IH door een halfgeleider loopt en een magnetische flux B loodrecht op de stroom doorloopt, er een spanning VH wordt opgewekt in de richting loodrecht op zowel de stroom als het magnetische veld". De Amerikaanse natuurkundige Edwin Herbert Hall ontdekte dit fenomeen en noemde het het "Hall-effect". De opgewekte spanning VH wordt uitgedrukt met de volgende formule:
VH = (KH / d)・IH・B
※KH: Hallcoëfficiënt, d: dikte van het magnetische fluxpenetratieoppervlak
Zoals de formule laat zien, geldt: hoe hoger de stroom, hoe hoger de spanning. Deze karakteristiek wordt vaak gebruikt om de positie van de rotor (magneet) te detecteren.
Rotatieprincipe van driefasen borstelloze motoren met volle golf
Het rotatieprincipe van een borstelloze motor wordt nu uitgelegd in stappen 1 tot en met 6. Voor een beter begrip is de permanente magneet vereenvoudigd van een cirkelvorm naar een rechthoekige vorm.
① In een driefasig spoelsysteem is spoel 1 vastgezet op de 12-uurspositie, spoel 2 op de 4-uurspositie en spoel 3 op de 8-uurspositie op de wijzerplaat. Een 2-polige permanente magneet met de N-pool links en de S-pool rechts kan draaien.
Laat een stroom Io door spoel 1 lopen om een S-pool magnetisch veld aan de buitenkant van de spoel te produceren. Laat een stroom van Io/2 door spoel 2 en 3 lopen om een N-pool magnetisch veld aan de buitenkant van de spoel te produceren.
Wanneer de magnetische velden van spoelen 2 en 3 vectorieel gecombineerd worden, ontstaat er een N-pool magnetisch veld dat naar beneden wijst. Dit magnetische veld is 0,5 keer zo groot als het magnetische veld dat wordt opgewekt door de stroom Io die door een enkele spoel gaat, en wanneer het wordt opgeteld bij het magnetische veld van spoel 1, wordt het 1,5 keer zo groot. Dit produceert een gecombineerd magnetisch veld loodrecht op de permanente magneet, dat een maximaal koppel genereert en ervoor zorgt dat de permanente magneet rechtsom draait.
Als de stroom door spoel 2 wordt verlaagd en de stroom door spoel 3 wordt verhoogd op basis van de rotatiepositie, draait het gecombineerde magnetische veld ook rechtsom, waardoor de permanente magneet blijft draaien.
② In een gedraaide toestand van 30 graden wordt een stroom Io door spoel 1 geleid, waardoor de stroom in spoel 2 nul wordt en de stroom Io uit spoel 3 stroomt.
De buitenkant van spoel 1 wordt een S-pool en de buitenkant van spoel 3 wordt een N-pool. Wanneer ze vectorieel gecombineerd worden, is het geproduceerde magnetische veld √3 (≈1,72) keer sterker dan het magnetische veld dat geproduceerd wordt door de stroom Io die door een enkele spoel gaat. Dit produceert ook een gecombineerd magnetisch veld loodrecht op de permanente magneet, die met de klok mee draait.
Als de rotatiepositie verandert, wordt de stroom die naar spoel 1 vloeit gereduceerd, de stroom die naar spoel 2 vloeit begint bij nul en neemt toe, en de stroom die uit spoel 3 vloeit neemt toe tot Io. Als gevolg hiervan draait het gecombineerde magnetische veld ook rechtsom, waardoor de permanente magneet blijft draaien.
※ Ervan uitgaande dat elke fasestroom een sinusgolf is, is de stroomwaarde hier Io × sin(π⁄3) = Io × √3⁄2. Door vectoriële combinatie van de magnetische velden is de totale magnetische veldgrootte 1,5 keer het magnetische veld dat door een enkele spoel wordt geproduceerd.
Wanneer elke fasestroom een sinusgolf is, ongeacht de positie van de permanente magneet, is de grootte van het vectorieel gecombineerde magnetische veld altijd 1,5 keer het magnetische veld dat door een enkele spoel wordt geproduceerd, en het magnetische veld staat loodrecht op het magnetische veld van de permanente magneet onder een hoek van 90 graden.
③ Bij een voortdurende rotatie van 30 graden stroomt er een stroom van Io/2 door spoel 1, een stroom van Io/2 stroomt door spoel 2, en een stroom van Io stroomt uit spoel 3.
De buitenkant van spoel 1 wordt een S-pool, de buitenkant van spoel 2 wordt ook een S-pool en de buitenkant van spoel 3 wordt een N-pool. Wanneer vectorieel gecombineerd, is het geproduceerde magnetische veld 1,5 keer het magnetische veld dat wordt geproduceerd wanneer een stroom van Io door een enkele spoel gaat (hetzelfde als in stap 1). Dit produceert ook een gecombineerd magnetisch veld loodrecht op het magnetische veld van de permanente magneet onder een hoek van 90 graden en draait met de klok mee.
④-⑥
Ga door met draaien op dezelfde manier als stap 1-3.
Als de stroom die naar de spoelen vloeit continu wordt omgeschakeld op basis van de positie van de permanente magneet, zal de permanente magneet in een vaste richting draaien. Op dezelfde manier, als de stroom in de tegenovergestelde richting wordt gestuurd en de richting van het gecombineerde magnetische veld wordt omgekeerd, zal de rotatie linksom zijn.
Het volgende diagram toont de stroom door elke spoel voor elke stap van 1 tot 6.
Door de bovenstaande uitleg zou de relatie tussen stroomveranderingen en rotatie nu begrepen moeten worden.
6. Stappenmotor
Een stappenmotor is een motortype dat nauwkeurig kan worden geregeld in termen van draaihoek en snelheid door synchronisatie met een pulssignaal. Stappenmotoren staan ook bekend als "pulsmotoren".
Omdat stappenmotoren nauwkeurige positionering kunnen bereiken zonder gebruik te maken van positiesensoren en met alleen open-loopregeling, worden ze veel gebruikt in apparatuur die positionering vereist.
Structuur van stappenmotor (tweefasig bipolair)
De volgende afbeeldingen van links naar rechts tonen voorbeelden van het uiterlijk van een stappenmotor, een schematisch diagram van de interne structuur en een conceptueel diagram van de structuur.
In het verschijningsvoorbeeld worden zowel de HB (hybride) als de PM (permanente magneet) types stappenmotoren getoond. Het schematische diagram in het midden toont ook de structuur van zowel het HB- als het PM-type.
Een stappenmotor heeft een structuur waarbij de spoelen vast zitten en de permanente magneet draait. Het conceptuele diagram van de interne structuur van de stappenmotor rechts is een voorbeeld van een PM-motor met tweefasige (twee sets) spoelen.
In het voorbeeld van de basisstructuur van de stappenmotor zijn de spoelen aan de buitenkant geplaatst en is de permanente magneet aan de binnenkant geplaatst. Naast het tweefasige type zijn er typen met meer fasen, zoals driefasig en vijffasig.
Sommige stappenmotoren hebben verschillende structuren, maar om het basisprincipe van stappenmotoren uit te leggen, wordt in dit artikel de stappenmotor met de basisstructuur van vaste spoelen en roterende permanente magneten gepresenteerd.
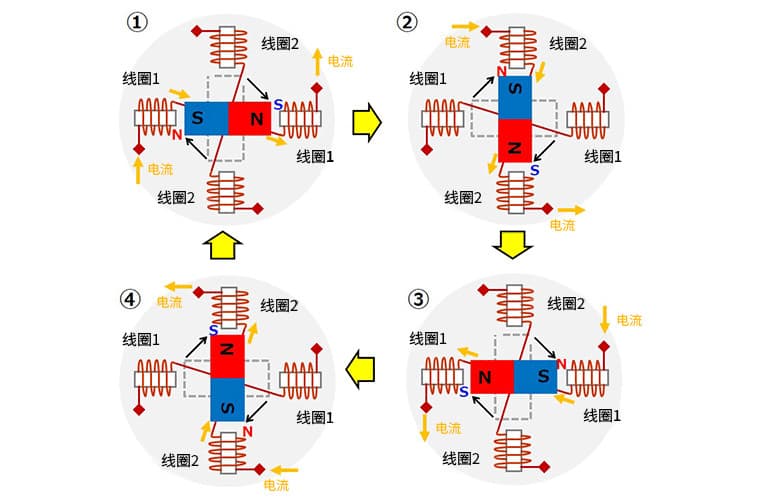
Het volgende diagram wordt gebruikt om het basisprincipe van de stappenmotor uit te leggen. Dit is een bekrachtigingsvoorbeeld van elke fase (één set spoelen) van de tweefasige bipolaire spoelen in de vorige afbeelding, uitgaande van een toestandsverandering van ① naar ④. De spoelen bestaan uit spoelen 1 en 2, en de stroompijl geeft de stroomrichting aan.
①
Elektrische stroom stroomt vanaf de linkerkant van spoel 1 en verlaat deze aan de rechterkant.
Laat geen elektrische stroom door spoel 2 lopen.
Op dit punt wordt de binnenkant van de linker spoel 1 het noorden en de binnenkant van de rechter spoel 1 het zuiden.
Als gevolg hiervan wordt de middelste permanente magneet aangetrokken door het magnetische veld van spoel 1 en stopt in een toestand waarbij de linkerkant zuid is en de rechterkant noord.
②
Stop de stroom in spoel 1 en laat stroom lopen van de bovenkant van spoel 2 naar de onderkant.
De binnenkant van de bovenste spoel 2 wordt het noorden en de binnenkant van de onderste spoel 2 wordt het zuiden.
De permanente magneet wordt aangetrokken door het magnetische veld en draait 90° rechtsom en stopt.
③
Stop de stroom in spoel 2 en laat stroom vloeien van de rechterkant van spoel 1 naar de linkerkant.
De binnenkant van de linker spoel 1 wordt Zuid en de binnenkant van de rechter spoel 1 wordt Noord.
De permanente magneet wordt aangetrokken door het magnetische veld en draait nog eens 90° met de klok mee en stopt.
④
Stop de stroom in spoel 1 en laat stroom lopen vanaf de onderkant van spoel 2 en vanaf de bovenkant.
De binnenkant van de bovenste spoel 2 wordt Zuid en de binnenkant van de onderste spoel 2 wordt Noord.
De permanente magneet wordt aangetrokken door het magnetische veld en draait nog eens 90° met de klok mee en stopt.
Door de stroom door de spoelen in de volgorde van de stappen ① tot ④ te schakelen met behulp van elektronische schakelingen, kan de stappenmotor gedraaid worden. In dit voorbeeld zal elke schakelhandeling de stappenmotor 90° draaien.
Bovendien kan de stappenmotor, door continu stroom door een bepaalde spoel te laten lopen, zijn stoppositie behouden en een houdkoppel hebben. Het is vermeldenswaard dat het omkeren van de volgorde van de stroom door de spoelen de stappenmotor in de tegenovergestelde richting kan laten draaien.
Als oprichter van MachineMFG heb ik meer dan tien jaar van mijn carrière gewijd aan de metaalbewerkingsindustrie. Door mijn uitgebreide ervaring ben ik een expert geworden op het gebied van plaatbewerking, verspaning, werktuigbouwkunde en gereedschapsmachines voor metalen. Ik denk, lees en schrijf voortdurend over deze onderwerpen en streef er voortdurend naar om voorop te blijven lopen in mijn vakgebied. Laat mijn kennis en expertise een aanwinst zijn voor uw bedrijf.
Heb je je ooit afgevraagd wat ervoor zorgt dat een elektromotor soepel blijft draaien zonder oververhit te raken? Inzicht in de veilige bedrijfstemperaturen voor motoren is cruciaal voor hun levensduur en prestaties. In dit artikel...
In de snelle wereld van industriële automatisering zijn servomotoren de onbezongen helden van precisie en efficiëntie. Maar met talloze fabrikanten die om aandacht strijden, hoe weet u welke...
Heb je je ooit afgevraagd hoe graafmachines en andere zware machines hun krachtige taken uitvoeren? In dit artikel verkennen we de fascinerende verschillen tussen hydraulische pompen en motoren. Je leert hoe...
Heb je je ooit afgevraagd hoe machines nauwkeurige bewegingen maken? Deze blog duikt in de fascinerende wereld van servomotorbesturingsmodi. Van puls- tot analoge besturing, we onderzoeken hoe elke methode werkt...
Heb je je ooit afgevraagd hoe treinen boven de rails kunnen zweven of hoe robots precieze bewegingen kunnen maken? Dit artikel onthult de fascinerende wereld van lineaire motoren en legt hun principes, typen en unieke voordelen uit....
Heb je je ooit afgevraagd hoe je de perfecte motor voor je project kiest? De sleutel ligt in het begrijpen van de soorten motoren - DC, asynchroon en synchroon - en hun unieke voordelen. Dit artikel...
Waarom worden motorlagers zo heet en wat kan eraan gedaan worden? Dit artikel gaat in op de oorzaken van het warm worden van motorlagers, van overmatige belastingen en...
Wat gebeurt er als de magnetische balans van een motor niet in orde is? Eenzijdige magnetische trek ontstaat door een onevenwichtige luchtspleet in motoren, waardoor ongelijke krachten ontstaan die de motorlagers belasten. Dit artikel...
Welke invloed hebben lagers op de efficiëntie en duurzaamheid van rechte reductiemotoren? Dit artikel gaat in op de kritieke rol van lagers, bespreekt hun selectie en opstelling en hoe ze omgaan met...