Boks Kracht Berekenaar & Formule (Online & Gratis)
Heb je je ooit afgevraagd hoe je kunt zorgen voor een succesvol metaalstempelproject? In deze blogpost duiken we in de kritieke factoren die uw stempelproces kunnen maken of breken....
Waarom zoemt de ene bewerkingsmachine met precisie terwijl de andere onvoorspelbaar schokt? Het antwoord ligt in hun hydraulische besturingssystemen. In dit artikel worden de cruciale verschillen tussen open-loop en gesloten-loop hydraulische besturingssystemen onderzocht en wordt hun verschillende rol in de prestaties van bewerkingsmachines aangetoond. Van eenvoudige richtingsbesturing tot geavanceerde feedbackmechanismen, u leert hoe elk systeem de precisie, stabiliteit en reactiesnelheid beïnvloedt. Duik in de mechanica en ontdek welk systeem past bij uw behoeften voor optimale besturing en efficiëntie.
Het hydraulische besturingssysteem bestaat uit hydraulische besturingscomponenten en transducers. Deze componenten bestaan doorgaans uit hydraulische regelkleppen, pompen, enz.
Hydraulische besturingstechnologie is een cruciaal aspect van automatische besturingstechnologie en staat bekend om zijn unieke eigenschappen, prominente voordelen en onmisbare rol.
Deze technologie vertegenwoordigt de integratie van elektromechanische vloeistof en wordt gedemonstreerd in het elektrische hydraulische regelsysteem, dat dynamische en negatieve feedbacksystemen gebruikt. Het hydraulisch regelsysteem is een dynamisch systeem dat de mechanische, elektrische en hydraulische onderdelen van een systeem integreert. hydraulische systemen.
Hydraulische besturingstechnologie wordt op grote schaal toegepast in diverse industrieën, waaronder de productie van apparatuur, auto's, lucht- en ruimtevaart, wapens, metallurgie, scheepvaart, medische techniek en nog veel meer.
Net als het elektromechanische besturingssysteem kan het hydraulische besturingssysteem worden onderverdeeld in een open regelkring en een gesloten regelkring.
Om het verschil tussen de twee te illustreren, gebruiken we de besturing van de bewegingsbalk van een bewerkingsmachine als voorbeeld.
De bewegingsbalk van de bewerkingsmachine is een gemeenschappelijk besturingsobject en dient als werkbank van de bewerkingsmachine. Hij is gemonteerd op de glijgeleider van de behuizing van de werktuigmachine.
Verschillende werktuigmachines hebben verschillende prestatievereisten voor de bewegingsbalk. De bewegingsbalk van de vlakslijpmachine heeft bijvoorbeeld alleen een stabiele horizontale heen-en-weergaande beweging nodig en geen nauwkeurige regeling van de verplaatsing.
Aan de andere kant wordt de bewegingsbalk van het NC-bewerkingscentrum of de CNC-freesmachine gebruikt voor precisieaanvoerbewegingen en de verplaatsing ervan moet nauwkeurig worden geregeld om een goede bewerkingskwaliteit te garanderen.
In het geval van de elektrohydraulische afkantpersDe bewegingsafstand van de ram vereist ook een hoge nauwkeurigheid om consistente buighoeken te behouden en verminderde buigingseffecten te voorkomen.
Om het verschil tussen open en gesloten hydraulische besturing beter te begrijpen, gebruiken we de bewegingsbalk van een bewerkingsmachine als een bestuurd object en bouwen we drie gangbare hydraulische besturingssystemen met elektromagnetische richtkleppen, elektromagnetische proportionele richtkleppen en elektrohydraulische servokleppen als belangrijkste besturingscomponenten.
Het hydraulische regelschema kan gebruikt worden voor de horizontale heen en weer bewegende werktafel van een typische vlakslijpmachine, zoals getoond in Figuur 1.1.
Dit hydraulische regelsysteem maakt gebruik van een elektromagnetische richtingsklep.
Een elektromagnetische vierwegsklep met drie standen dient als besturingseenheid en een rijschakelaar of naderingsschakelaar geeft instructies. Een elektrisch relais vormt een logisch computernetwerk.
Deze opstelling maakt de logische werking van het besturingssignaal en de vermogensversterking mogelijk, waardoor voldoende elektromagneet wordt opgewekt om de elektromagnetische richtklep aan te sturen.
De klepkern van de elektromagnetische richtklep heeft drie standen: links, midden en rechts, en kan de oliestroomonderbreker en schakelaar aansturen.
Elke kleppoort heeft slechts twee toestanden, volledig open en volledig gesloten, wat de elektromagnetische richtingsklep classificeert als een elektromagnetische hydraulische schakelklep.
De elektromagnetische richtingsklep kan alleen de werking van het oliecircuit starten en stoppen om de bewegingsbalk te regelen, maar kan de snelheid van de bewegende balk niet aanpassen.
Om de snelheid van de bewegende balk te regelen, wordt een smoorklep geïnstalleerd in het hydraulische regelsysteem om de smoorklep te regelen.
Door de klepopening aan te passen, kan het gasdrukverschil worden geregeld, waardoor de oliestroom terug naar de tank verandert en indirect de in- en uitstroom van hydraulische olie naar de hydraulische cilinder wordt aangepast, waardoor uiteindelijk de snelheid van de balk verandert.
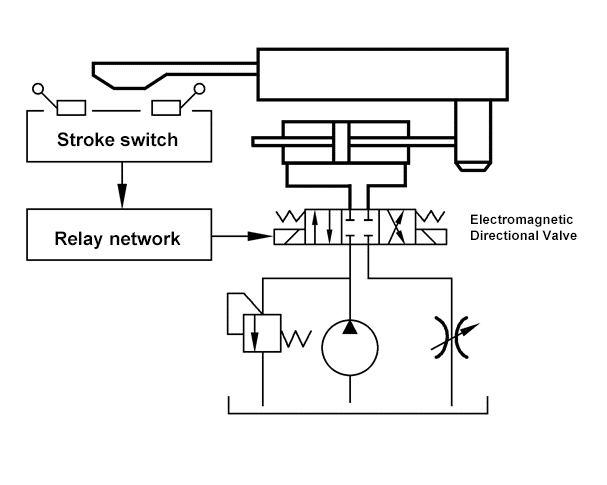
Fig. 1.1 Schema voor gebruik van elektromagnetische richtingsklep in regelsysteem
De snelheid van de bewegingsbalk kan alleen worden geregeld door de gasklep en kan niet elektrisch worden geregeld. Dit resulteert in plotselinge snelheidsveranderingen en aanzienlijke trillingen van de balk.
Het principe van het hydraulische regelsysteem met de elektromagnetische richtingsklep wordt getoond in Figuur 1.2.
Het besturingssignaal wordt gegenereerd door de rijschakelaar en is een logische besturingseenheid (0 of 1).
Het relaisnetwerk voert een logische bewerking uit op het besturingssignaal en versterkt de voeding naar de overeenkomstige elektromagneet, waardoor de overeenkomstige klepkern in beweging komt.
Hierdoor veranderen de drie posities van de klepkern van links naar rechts en wordt de hydraulische stuurstroom uitgevoerd, die de hydraulische cilinder aandrijft en de bewegingsbalk van de bewerkingsmachine beweegt.

Fig.1.2 Schema voor het gebruik van een elektromagnetische richtklepbesturing
Het hydraulische besturingssysteem dat bestaat uit een elektromagnetische richtklep en relais kan alleen eenvoudige besturingsinstructies genereren.
Het stuursignaal is eenrichtingsverkeer en stroomt alleen in de voorwaartse richting van het gecontroleerde object.
Dit regelsysteem is een open-lus regelsysteem.
De responstijd van de besturingsinstructie naar het gecontroleerde object is afhankelijk van de responstijd van elke component in de signaaloverdrachtsweg.
Omdat het besturingsinstructiesignaal echter eenvoudig is, is er geen probleem dat het besturingssysteem het uitgangsinstructiesignaal niet volgt.
Als een component verstoord is en een verkeerde beweging produceert, kan het systeem de fout niet automatisch corrigeren of compenseren.
De proportionele elektromagnetische richtklep is een hoogwaardig, duur type elektromagnetische hydraulische klep.
Voor bewegingsbalkbesturing die hogere prestaties vereist, zoals vlakslijpmachines met numerieke besturing (waarbij nauwkeurige besturing van de verplaatsing van de werktafel niet nodig is), kan een proportionele elektromagnetische klep worden gebruikt als besturingseenheid om een hydraulisch besturingssysteem met weinig impact en trillingen te vormen, zoals getoond in Figuur 1.3.

Fig.1.3 Schema voor het gebruik van proportionele elektromagnetische richtkleppen in het regelsysteem.
De proportionele hydraulische klep gebruikt een elektrisch signaal om de klepkern te regelen voor een geleidelijke beweging.
Daarom kunnen, om de geleidelijke verandering in klepopening te regelen, de drukval en het debiet van de proportionele hydraulische klep worden aangepast, waardoor de verhouding tussen debiet en stuursignalen verandert.
De programmabesturing genereert elektrische signalen om de bewegende balk te besturen, waardoor de geleidelijke verandering in elektrische signalen de bewegingssnelheid van de balk kan besturen en aanpassen. Dit resulteert in een soepele verandering in snelheid en richting van de beweging van de straal met minimale impact.
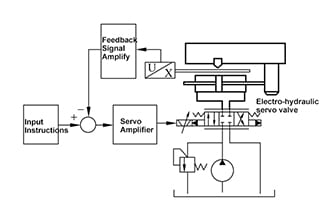
Het principe van het hydraulische regelsysteem met de proportionele elektromagnetische richtklep wordt getoond in Figuur 1.4.
Het besturingssignaal wordt gegenereerd door de programmabesturing en is een analoog besturingssignaal (continu elektrisch signaal) dat wordt versterkt door een proportionele versterker om de corresponderende proportionele elektromagneet van het proportionele magneetventiel aan te sturen.
Dit zorgt voor een continu instelbare verplaatsing en een continu veranderende hydraulische druk om de oliestroom te regelen en de oliecilinder aan te drijven, waardoor de beweging van de balk van de bewerkingsmachine wordt gerealiseerd.
In het hydraulische regelsysteem dat gebruikmaakt van de proportionele elektromagnetische richtingsklep kan weliswaar een gradiëntregelaar worden gebruikt om een continu gradiëntregelsignaal af te geven, maar het regelsignaal is eenrichtingsverkeer en stroomt alleen in de voorwaartse richting van het gecontroleerde object. Dit is een open-lus regelsysteem.
Het commandosysteem kan een continu gradiëntsignaal verzenden en de uitvoer van het systeem kan het commandosignaal volgen, maar de volgnauwkeurigheid is laag en de reactiesnelheid is traag en afhankelijk van de reactietijd van de signaaloverdrachtscomponenten.
Fouten door interferentie kunnen niet automatisch worden gecompenseerd.

Fig.1.4 Diagram voor het gebruik van proportionele elektromagnetische richtkleppen in het besturingssysteem.
De beweging van de werktafel van het NC-bewerkingscentrum is een kritisch onderdeel van het bewerkingsproces en vereist hoge precisie en snelle reactiesnelheid.
In dit geval is een elektrohydraulische servobesturing systeem gebruikt worden, waarbij een elektrohydraulische servoklep als besturingseenheid dient.
De elektrohydraulische servoklep is een hoogwaardige hydraulische regeleenheid met een nauwkeurige regeling en snelle reactiesnelheid, maar hij is duur.
De elektrohydraulische servoklep wordt vaak gebruikt in elektrohydraulische closed-loop regelsystemen, waarbij het gecontroleerde object tijdelijk kan worden aangedreven door de open-loop regelmodus.
Het hydraulische besturingssysteem voor de bewegingsbalk van de bewerkingsmachine met een elektrohydraulische servoklep wordt getoond in afbeelding 1.5.
De bewerkingsmachine is uitgerust met een verplaatsingssensor die de positie van de bewegende balk detecteert, een positiespanningssignaal genereert en het signaal na versterking in de elektronische besturing invoert.
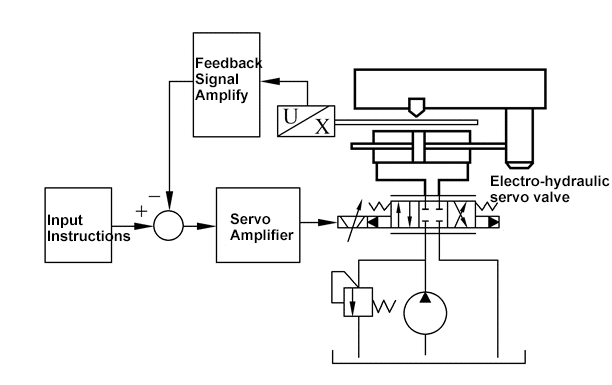
Fig.1.5 Diagram voor het gebruik van elektrohydraulische servoklep in het besturingssysteem.
Het besturingsapparaat vergelijkt het positiespanningssignaal van de huidige bundel van de bewerkingsmachine met het spanningssignaal van de besturingsinstructie om het afwijkingsspanningssignaal te genereren.
Het afwijkingssignaal is een continue analoge spanning die nauwkeurig en in real-time het verschil weergeeft tussen de positie van de balk van de bewerkingsmachine en de besturingsinstructie (de gewenste positie van de balk).
Het afwijkingssignaal wordt versterkt door de proportionele versterker en regelt de verplaatsing van de koppelmotor in de elektrohydraulische servoklep en de zeer nauwkeurige, hoogdynamische regelklepkern.
Dit genereert de vereiste hydraulische stroming en druk om de hydraulische cilinder aan te drijven en de balk van de bewerkingsmachine te verplaatsen.
De beweging van de balk wordt gedetecteerd door de verplaatsingssensor en naar het elektronische besturingsapparaat gestuurd, waardoor een gesloten-lus controlesignaal ontstaat. Dit regelsysteem wordt gesloten regelkring genoemd.
Het hierboven beschreven controleproces wordt weergegeven in Figuur 1.6.
Het systeem is een gesloten regelstructuur.
In een hydraulisch regelsysteem met gesloten lus is er niet alleen het voorwaartse regeleffect van de regelaar op het gecontroleerde object, maar is er ook een terugkoppelingseffect van het gecontroleerde object naar de regelaar.
Het gesloten regelsysteem heeft een hoge precisie, snelle dynamische respons en automatische compensatie voor externe interferentie.
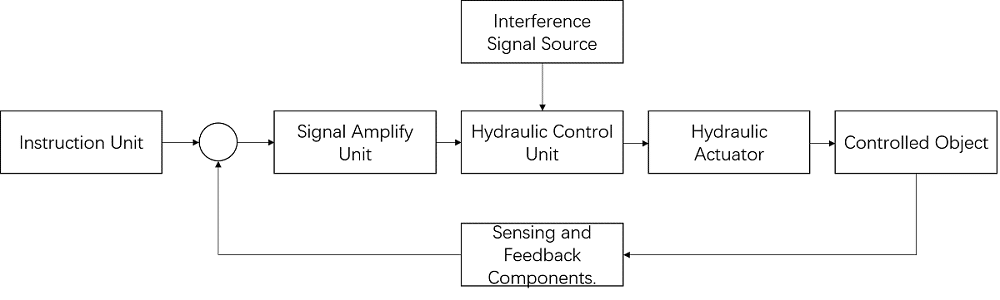
Fig.1.6 Diagram voor het gebruik van elektrohydraulische servoklep voor het besturingssysteem.
Hydraulische besturing met open lus en hydraulische besturing met gesloten lus zijn twee soorten basisbesturingsmethoden voor hydraulische besturing.
1. Hydraulische regeling met open lus.
Het open-lus regelsysteem, dat zowel gewone hydraulische kleppen als proportionele hydraulische kleppen gebruikt, heeft een aanzienlijke technische overlap met het open-lus regelsysteem. hydraulische transmissie systeem, omdat ze vaak gebruikmaken van vergelijkbare soorten hydraulische onderdelen en circuits.
De prestaties van het open-lus hydraulisch regelsysteem zijn grotendeels afhankelijk van de prestaties van de hydraulische componenten.
De nauwkeurigheid in het open-loop systeem wordt beïnvloed door de nauwkeurigheid van elke component en de respons van het systeem is direct gekoppeld aan de respons van elke component.
Het open-loop hydraulische regelsysteem kan veranderingen in de systeemoutput als gevolg van externe verstoringen of interne parametervariaties niet regelen of compenseren.
Wat het ontwerp betreft, is het hydraulische open-lus regelsysteem eenvoudig van structuur en vereist het stabiliteit, waardoor de systeemanalyse, het ontwerp en de installatie relatief eenvoudig zijn. Het kan ook profiteren van de ervaring en kennis die is opgedaan met hydraulische transmissiesysteem ontwerp.
Het belangrijkste verschil tussen het hydraulische open-lus regelsysteem en het hydraulische transmissiesysteem ligt in hun focus. Het open-lus hydraulisch systeem wordt meestal gebruikt in omstandigheden die een lage nauwkeurigheid, minimale externe verstoring, kleine veranderingen in interne parameters en een langzame reactietijd vereisen.
Concluderend kan worden gesteld dat het open-lus hydraulisch regelsysteem een basismethode is zonder terugkoppeling. De regelaar heeft alleen controle over de enkele richting van het gecontroleerde object en er is geen omgekeerd effect van het gecontroleerde object naar de regelaar. Eventuele fouten door interferentie kunnen niet automatisch worden gecompenseerd.
Vanwege de lage nauwkeurigheid en trage respons van het open-lus regelsysteem wordt het over het algemeen niet aanbevolen om een servoklep, die hoge eisen stelt aan de werkomstandigheden en een hoge prijs en prestatie heeft, te gebruiken bij de constructie van een open-lus regelsysteem.
2. Hydraulische regeling met gesloten lus.
Het hydraulische regelsysteem met gesloten lus heeft vaak een elektrohydraulische servoklep of een direct drive valve (DDV) als besturingseenheid.
Elektrohydraulische servokleppen en kleppen met directe aandrijving zijn hoogwaardige hydraulische besturingscomponenten met gesloten regelkring met terugkoppeling, wat leidt tot hoge precisie en snelle reactiesnelheden.
Het hydraulische regelsysteem met gesloten lus wordt ook wel een hydraulisch feedbackregelsysteem genoemd, dat werkt volgens het principe van terugkoppeling.
Het basisconcept van terugkoppeling is het elimineren of verminderen van afwijkingen door middel van afwijking.
Het feedbackregelsysteem werkt door informatie over het gecontroleerde object die is gedetecteerd door de terugkoppeleenheid te vergelijken met de besturingsinstructies van de systeeminstructie-eenheid, waardoor een afwijkingssignaal wordt geproduceerd.
Dit afwijkingssignaal wordt versterkt en gebruikt om een krachtige hydraulische regelklep aan te sturen, die op zijn beurt de hydraulische actuator en het gecontroleerde object aanstuurt.
Het hydraulische regelsysteem met gesloten regelkring vormt een gesloten lus, waardoor het gecompliceerder is om te analyseren, te ontwerpen en in bedrijf te stellen dan open-lussystemen. De hoge regelnauwkeurigheid en het sterke vermogen om interferentie te voorkomen maken het echter een investering die de moeite waard is.
Met gesloten regelkring (terugkoppelingsmethode) kan een regelsysteem met hoge precisie en storingsbestendigheid worden gebouwd, zelfs als de gebruikte hydraulische componenten minder nauwkeurig en minder storingsbestendig zijn.
Bovendien kunnen bestaande hydraulische componenten worden gebruikt om betere prestaties en regeleffecten van het regelsysteem te bereiken via gesloten regelkringen.
Teruggekoppelde regeling biedt voordelen die niet kunnen worden bereikt met open-lusregeling.

Als oprichter van MachineMFG heb ik meer dan tien jaar van mijn carrière gewijd aan de metaalbewerkingsindustrie. Door mijn uitgebreide ervaring ben ik een expert geworden op het gebied van plaatbewerking, verspaning, werktuigbouwkunde en gereedschapsmachines voor metalen. Ik denk, lees en schrijf voortdurend over deze onderwerpen en streef er voortdurend naar om voorop te blijven lopen in mijn vakgebied. Laat mijn kennis en expertise een aanwinst zijn voor uw bedrijf.