Geval één
Gegeven:
- Schijfmassa M=50 kg
- Schijfdiameter D=500 mm
- Maximale schijfsnelheid 60 rpm
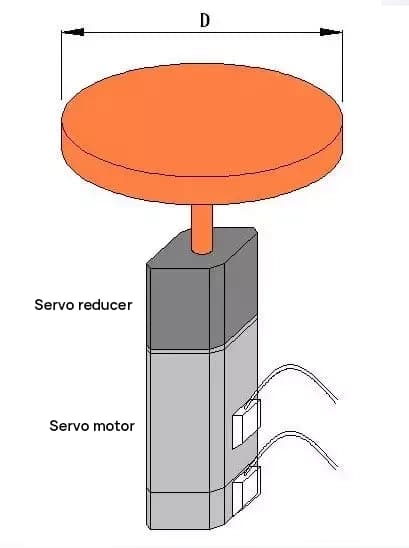
Selecteer de servomotor en reductietandwiel, het componentenschema ziet er als volgt uit:
Het traagheidsmoment voor de schijfomwenteling berekenen
JL = MD2/8 = 50 * 502 / 8 = 15625 [kg-cm2]
Uitgaande van een overbrengingsverhouding van 1:R, is de traagheid van de belasting op de servomotoras 15625/R2.
Volgens het principe dat de traagheid van de belasting kleiner moet zijn dan drie keer de traagheid van de rotor JM van de motor,
als een 400W motor is geselecteerd, JM = 0,277 [kg-cm2],
toen: 15625 / R2 < 3*0.277, R2 > 18803, R > 137,
het uitgaande toerental = 3000/137 = 22 [rpm],
die niet aan de vereiste voldoet.
Als een 500W motor is geselecteerd, JM = 8,17 [kg-cm2],
toen: 15625 / R2 < 3*8.17, R2 > 637, R > 25,
het uitgaande toerental = 2000/25 = 80 [rpm],
die aan de vereiste voldoet.
Dit type transmissie heeft minimale weerstand, dus koppelberekeningen worden genegeerd.
Geval Twee
Gegeven:
- Belastingsgewicht M = 50 kg
- Synchrone riem wieldiameter D = 120 mm
- Verminderingsfactor R1 = 10, R2 = 2
- Wrijvingscoëfficiënt tussen belasting en machinetafel µ = 0,6
- Maximale bewegingssnelheid van de lading: 30 m/min
- Tijd voor lading om te versnellen van rust naar maximale snelheid: 200ms
Zonder rekening te houden met het gewicht van elk transportbandwiel,
Wat is het minimaal vereiste vermogen voor een motor om een dergelijke belasting aan te drijven?
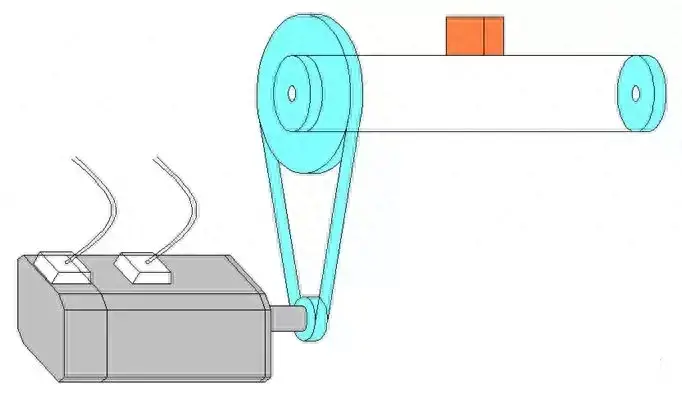
Het schematische diagram van de component ziet er als volgt uit:
1. De traagheid van de belasting berekenen die op de motoras wordt gereflecteerd:
JL = M * D2 / 4 / R12
= 50 * 144 / 4 / 100
= 18 [kg-cm2]
Volgens het principe dat de traagheid van de belasting minder moet zijn dan drie keer de traagheid van de motorrotor (JM):
JM > 6 [kg-cm2]
2. Het vereiste koppel berekenen om de motorbelasting aan te drijven:
Koppel dat nodig is om wrijving te overwinnen:
Tf = M * g * µ * (D / 2) / R2 / R1
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10
= 0,882 [N-m]
Benodigd koppel voor acceleratie:
Ta = M * a * (D / 2) / R2 / R1
= 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10
= 0,375 [N-m]
Het nominale koppel van de servomotor moet groter zijn dan Tfen het maximumkoppel moet groter zijn dan Tf + Ta.
3. De vereiste motorsnelheid berekenen:
N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10
= 796 [rpm]
Geval drie
Gegeven:
- Belastingsgewicht M = 200 kg
- Schroefafstand PB = 20 mm
- Schroefdiameter DB = 50 mm
- Gewicht schroef MB = 40 kg
- Wrijvingscoëfficiënt µ = 0,2
- Mechanisch rendement η = 0,9
- Bewegingssnelheid last V = 30 m/min
- Totale bewegingstijd t = 1,4 s
- Acceleratie- en deceleratietijd t1 = t3 = 0.2 s
- Rusttijd t4 = 0.3 s
Selecteer de servomotor met het minimale vermogen dat voldoet aan de belastingseisen,
Het componentendiagram ziet er als volgt uit:
1. Berekening van de traagheid van de belasting omgerekend naar de motoras
Traagheidsbelasting van het gewicht omgerekend naar de motoras
JW = M * (PB / 2π)²
= 200 * (2 / 6.28)²
= 20,29 [kg-cm²]
De rotatietraagheid van de schroef
JB = MB * DB² / 8
= 40 * 25 / 8
= 125 [kg-cm²]
Totale traagheid belasting
JL = JW + JB = 145,29 [kg-cm²]
2. Berekening van motorsnelheid
Vereist motortoerental
N = V / PB
= 30 / 0.02
= 1500 [rpm]
3. Berekening van het koppel dat nodig is om de motorbelasting aan te drijven
Het koppel dat nodig is om wrijving te overwinnen
Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9
= 1,387 [N-m]
Benodigd koppel wanneer het gewicht versnelt
TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9
= 1,769 [N-m]
Benodigd koppel wanneer de schroef versnelt
TA2 = JB * α / η
= JB * (N * 2π / 60 / t1) / η
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9
= 10,903 [N-m]
Totaal koppel vereist voor versnelling
TA = TA1 + TA2 = 12,672 [N-m]
4. Selectie van servomotor
Nominaal koppel van de servomotor
T > Tf en T > Trms
Maximaal koppel van de servomotor
Tmax > Tf + TA
Uiteindelijk werd de ECMA-E31820ES motor geselecteerd.