Stappenmotor
Werkingsprincipe van stappenmotor
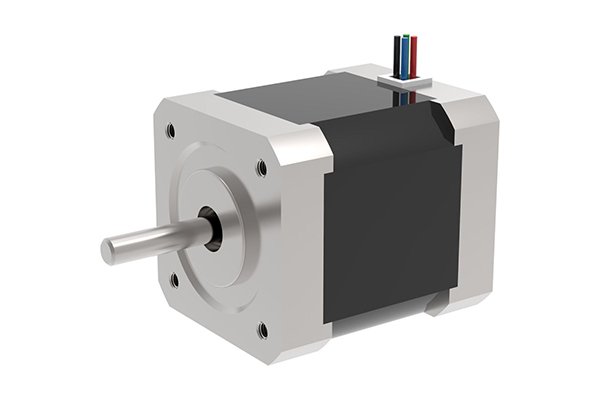
Een stappenmotor, een type motor speciaal ontworpen voor besturing, zet elektrische pulsen om in hoekverplaatsing.
Wanneer de stappenmotordriver een pulssignaal ontvangt, zorgt hij ervoor dat de stappenmotor draait onder een vooraf bepaalde vaste hoek, bekend als de "staphoek", in de opgegeven richting.
De motor draait stapsgewijs met de vaste staphoek.
Nauwkeurige positionering kan worden bereikt door het aantal pulsen te regelen en de snelheid en versnelling van de motorrotatie kan worden geregeld door de pulsfrequentie te regelen.
De draairichting van de motor kan worden omgekeerd door de volgorde waarin de wikkelingen worden bekrachtigd te veranderen.
Het werkingsprincipe van stappenmotordriver
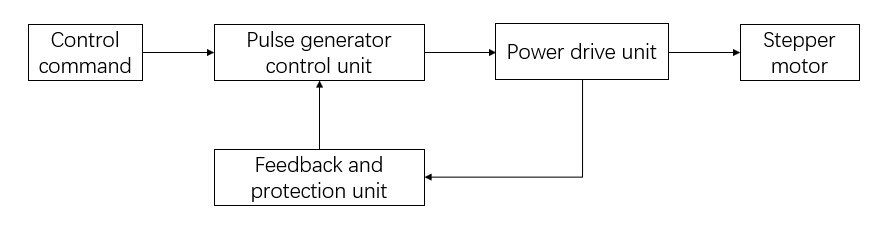
Een stappenmotor heeft een speciale stappenmotordriver nodig om te kunnen werken. Deze driver bestaat uit een impulsbesturing, een vermogensaandrijving en een beveiliging.
De voedingseenheid versterkt de pulsen die worden gegenereerd door de impulsbesturingseenheid en is rechtstreeks aangesloten op de stappenmotor, waarbij deze dient als voedingsinterface tussen de stappenmotor en de microcontroller.
De besturingsinstructie-eenheid ontvangt puls- en richtingssignalen en genereert een reeks overeenkomstige pulsen, die vervolgens via de aandrijfeenheid naar de stappenmotor worden verzonden.
De stappenmotor draait dan een ingestelde staphoek in de aangegeven richting.
De stappenmotor heeft een aantal belangrijke technische specificaties, zoals het maximale statische koppel, startfrequentieen werkfrequentie.
Over het algemeen geldt: hoe kleiner de staphoek, hoe groter het maximale statische koppel en hoe hoger de start- en bedrijfsfrequenties.
Daarom wordt in de bedrijfsmodus sterk de nadruk gelegd op de technologie van de onderverdelingaandrijving.
Deze methode verbetert het koppel en de resolutie van de stappenmotor en elimineert oscillatie bij lage frequenties volledig.
Hierdoor zijn de prestaties van de onderverdeling superieur aan die van andere soorten schijven.
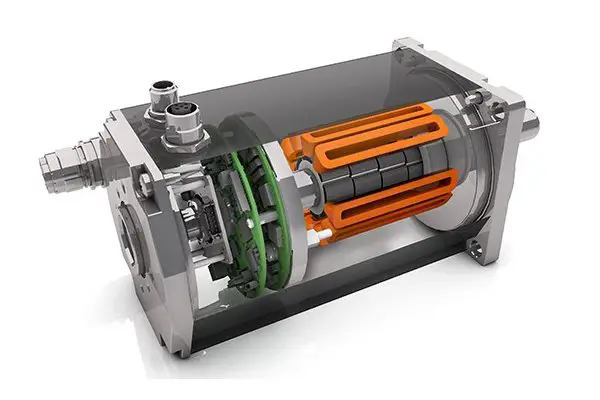
De rotor in een servomotor is een permanente magneet. De driver stuurt U/V/W-draaistroom aan om een elektromagnetisch veld te creëren, waardoor de rotor onder invloed van dit magnetische veld gaat draaien. De eigen encoder van de motor levert feedbacksignalen aan de driver, die de rotatiehoek van de rotor aanpast op basis van de feedbackwaarde en de doelwaarde.
Servomotor
Het werkingsprincipe van de servomotor
De servomotor, ook wel uitvoerende motor genoemd, wordt gebruikt als actuator in automatische besturingssystemen om ontvangen elektrische signalen om te zetten in hoekverplaatsing of hoeksnelheid op de motoras.
Servomotoren zijn er in twee varianten: DC en AC.
Wanneer een servomotor een puls ontvangt, draait hij de overeenkomstige hoek om verplaatsing te produceren. Dit komt doordat de servomotor zelf pulsen uitzendt, waarbij elke rotatiehoek een overeenkomstig aantal pulsen uitzendt die een gesloten lus vormen met de pulsen die de servomotor ontvangt.
Hierdoor kan het systeem het aantal pulsen dat het naar de servomotor stuurt en het aantal pulsen dat het ontvangt controleren, waardoor een nauwkeurige besturing en nauwkeurige positionering mogelijk zijn.
Qua prestaties zijn AC-servomotoren superieur aan DC-servomotoren. AC-servomotoren maken gebruik van sinusregeling, wat resulteert in een lage koppelrimpel en een hoge capaciteit.
DC-servomotoren gebruiken daarentegen trapeziumvormige golfregeling en presteren relatief slecht.
Borstelloze servomotoren in DC-servomotoren presteren echter beter dan borstelservomotoren.
Het werkingsprincipe van servomotordriver
Het inwendige van een servomotor bevat een rotor met permanente magneet.
De actuator stuurt driefasige U/V/W-elektriciteit aan om een elektromagnetisch veld op te wekken, waardoor de rotor gaat draaien.
Bovendien levert de encoder van de motor feedbacksignalen aan de bestuurder.
De bestuurder past de rotatiehoek van de rotor aan op basis van de feedbackwaarde en de gewenste doelwaarde.
Borstelaandrijving met DC-servomotor:
Het werkingsprincipe van de motor is vergelijkbaar met dat van een standaard gelijkstroommotor.
De actuator heeft een drie-lus structuur, bestaande uit een stroomlus, snelheidslus en positielus, gerangschikt in volgorde van binnen naar buiten.
De uitgang van de stroomlus regelt de ankerschakelspanning van de motor.
De ingang van de stroomlus is de PID-uitgang van de speedlus, de ingang van de speedlus is de PID-uitgang van de positielus en de ingang van de positielus is de opgegeven ingang.
Het regelschema is hierboven afgebeeld.
Borstelloze DC-servomotoraandrijving:
De stroombron is gelijkstroom, die door een interne driefasige omvormer wordt omgezet in U/V/W wisselstroom.
De driver maakt ook gebruik van een regelstructuur met drie lussen (stroomlus, snelheidslus, positielus) en het regelprincipe is hetzelfde als eerder beschreven.
AC servomotoraandrijving:
Het systeem kan worden onderverdeeld in twee afzonderlijke modules: het voedingspaneel en het bedieningspaneel, elk met verschillende functies.
Het bedieningspaneel voert PWM-signalen uit via een overeenkomstig algoritme, dat dient als aandrijfcircuit voor het aandrijfsignaal, om het uitgangsvermogen van de frequentieregelaar te wijzigen en de driefasige permanente magneet synchrone AC-servomotor aan te sturen.
De aandrijfeenheid zet eerst de ingevoerde driefasige elektriciteit of gemeentelijke elektriciteit om in gelijkstroom via een driefasig gelijkrichtcircuit met volledige brug.
De driefasige permanente magneet synchrone AC-servomotor wordt dan aangedreven door de commutator van een driefasige sinusvormige PWM-spanningsomvormer, na gelijkrichting van driefasige of gemeentelijke elektriciteit.
Dit proces is eenvoudigweg een AC-DC-AC conversie.
De besturingseenheid is de kern van het hele AC-servosysteem en voert de positie-, snelheids-, koppel- en stroomregeling van het systeem uit.
Prestatievergelijking van de servomotor en stappenmotor
Controle Nauwkeurigheid
Hoe meer fasen en slagen een stappenmotor heeft, hoe groter de nauwkeurigheid.
De servomotor krijgt feedback van zijn eigen encoder en hoe meer schalen de encoder heeft, hoe hoger de precisie.
Laagfrequentiekarakteristiek
Stappenmotoren zijn gevoelig voor laagfrequente trillingen bij lage snelheden.
Om dit tegen te gaan, wordt bij lage snelheden vaak gebruik gemaakt van dempings- of onderverdelingstechnologie.
Servomotoren daarentegen lopen soepel en zonder trillingen, zelfs bij lage snelheden.
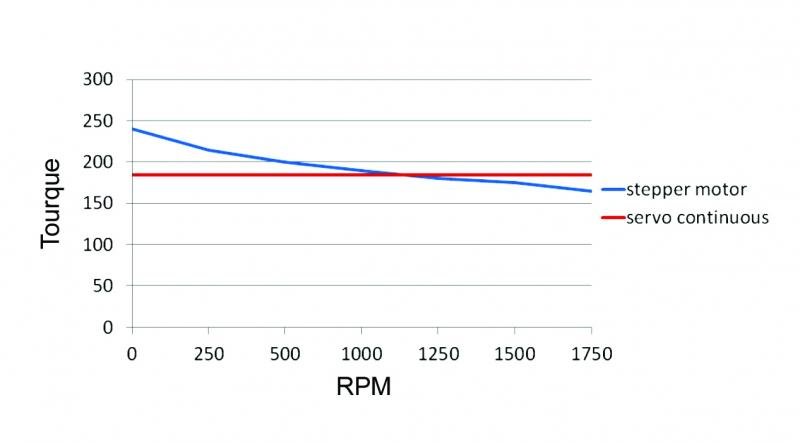
Koppelfrequentiekarakteristiek
Het uitgangskoppel van een stappenmotor neemt af bij een snelheidsverhoging en daalt aanzienlijk bij hoge snelheden.
Een servomotor daarentegen levert een constant koppel bij de nominale snelheid en een constant vermogen bij de nominale snelheid.
Overbelastingscapaciteit
Een stappenmotor heeft geen overbelastingscapaciteit, terwijl een servomotor een sterke overbelastingscapaciteit heeft.
Operationele prestaties
Stappenmotoren werken onder open-lusregeling, waardoor ze gevoelig zijn voor stapverlies of stoppen met draaien als de startfrequentie te hoog is of als de belasting te zwaar is. Als de snelheid te hoog is, kan dit ook resulteren in doorschieten.
Aan de andere kant maakt het AC-servoaandrijfsysteem gebruik van een gesloten regelkring. De driver van de servomotor bemonstert het feedbacksignaal van de motorencoder rechtstreeks en vormt zo interne positie- en snelheidsregelkringen. Het resultaat is dat stappenmotoren minder snel een stap verliezen of doorschieten, waardoor de regelprestaties betrouwbaarder zijn.
Snelheid Reactievermogen
Stappenmotoren hebben honderden milliseconden nodig om te accelereren van een statische toestand naar bedrijfssnelheid.
In vergelijking hiermee hebben AC-servosystemen uitstekende acceleratieprestaties, die meestal slechts enkele milliseconden duren, waardoor ze geschikt zijn voor toepassingen waarbij snel gestart en gestopt moet worden.