Boks Kracht Berekenaar & Formule (Online & Gratis)
Heb je je ooit afgevraagd hoe je kunt zorgen voor een succesvol metaalstempelproject? In deze blogpost duiken we in de kritieke factoren die uw stempelproces kunnen maken of breken....
Stelt u zich eens voor dat u afstanden tot op de millimeter nauwkeurig kunt meten zonder het object aan te raken. Laserafstandssensoren doen precies dat: ze gebruiken lasertechnologie om nauwkeurige metingen van positie, verplaatsing en meer vast te leggen. In dit artikel leert u meer over de principes achter deze sensoren, waaronder lasertriangulatie en echo-analyse, en ontdekt u hun diverse toepassingen in industrieën van productie tot elektronica. Of u nu geïnteresseerd bent in het verbeteren van de kwaliteitscontrole of het verhogen van de productie-efficiëntie, inzicht in laserafstandssensoren kan een spelbreker zijn.
Een laserafstandssensor is een meetinstrument dat lasertechnologie gebruikt om de positie, verplaatsing en andere veranderingen van een gemeten object te meten. Het bestaat uit een laser, een laserdetector en een meetcircuit.
Dit type sensor biedt nauwkeurige contactloze metingen en is in staat om verplaatsing, dikte, trillingen, afstand, diameter en andere nauwkeurige geometrische metingen te meten. De laser in de sensor heeft een uitstekende rechtheid kenmerken.
Vergeleken met ultrasone sensoren hebben laserafstandssensoren een hogere nauwkeurigheid. Het lasergeneratorapparaat is echter relatief complex en groot, waardoor het aantal toepassingen voor laserverplaatsingssensoren beperkt is.
Een laserafstandssensor is een apparaat dat nauwkeurig de positie, verplaatsing en andere veranderingen van een object meet zonder fysiek contact. Het wordt veel gebruikt om verplaatsing, dikte, trilling, afstand, diameter en andere geometrische eigenschappen van objecten te detecteren.
Het principe van een laserafstandssensor is onderverdeeld in twee methoden: lasertriangulatie en laserecho-analyse. De lasertriangulatiemethode wordt meestal gebruikt voor zeer nauwkeurige metingen op korte afstand, terwijl de laserecho-analysemethode geschikt is voor metingen op lange afstand.
Hieronder volgt een korte inleiding tot deze twee meetmethoden van het principe van de laserafstandssensor.
De lichtbundel wordt verwerkt door analoge en digitale elektronische verwerking op de positie van het ontvangende element. Na interne microverwerking en analyse wordt de corresponderende outputwaarde berekend en de outputwaarde wordt gebruikt om de lichtemissie naar het object aan te passen. Hierdoor wordt de verplaatsingsafstand van de lichtstraal aangepast.
Om een onderdeel te meten, plaatst u het in de aangewezen positie op de transportband. De lasersensor, geactiveerd door de laserscanner, zal het onderdeel dan detecteren en meten, om uiteindelijk de lengte te bepalen.
Plaats meerdere lasersensoren in de kantelrichting van het te meten werkstuk en laat één sensor direct de meetwaarde uitvoeren. Verder kan software worden gebruikt om de meetwaarde te berekenen en het resultaat weer te geven op basis van het ontvangen signaal of de gegevens.
Gebruik twee laserscanners om de te meten onderdelen ertussen te plaatsen en ontvang vervolgens de gegevens via de sensoren om de nauwkeurigheid en volledigheid van de afmetingen van het onderdeel te beoordelen.
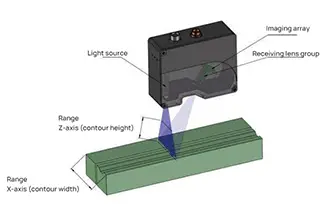
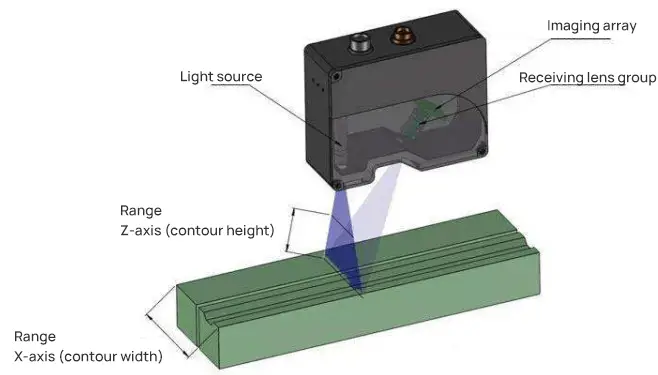
De laserzender projecteert een zichtbare rode laser via een lens op het oppervlak van het te meten object. Het verstrooide laserlicht van het objectoppervlak valt dan door de ontvangerlens en wordt gedetecteerd door de interne CCD lineaire camera.
Op basis van de afstand tot het object detecteert de CCD lineaire camera de lichtvlek onder verschillende hoeken. Met behulp van deze hoek en de bekende afstand tussen de laser en de camera berekent de digitale signaalprocessor de afstand tussen de sensor en het object.
De positie van de bundel in het ontvangstelement wordt vervolgens verwerkt door analoge en digitale schakelingen en de bijbehorende uitvoerwaarde wordt berekend door de microprocessor. Het standaardgegevenssignaal wordt proportioneel uitgevoerd in het analoge venster dat door de gebruiker is ingesteld. Als schakelwaarde-uitgang wordt geselecteerd, wordt deze binnen het ingestelde venster geactiveerd en daarbuiten uitgeschakeld.
Zowel de analoge als de schakelende uitgangen kunnen afzonderlijke detectievensters hebben. De laserverplaatsingssensor kan met behulp van driehoeksmeting een maximale lineariteit van 1um bereiken met een resolutie van 0,1um. De sensor van het type ZLDS100 heeft bijvoorbeeld een hoge resolutie van 0,01%, een hoge lineariteit van 0,1%, een snelle respons van 9,4KHz en kan presteren in ruwe omgevingen.
De laserafstandssensor maakt gebruik van het principe van echo-analyse om nauwkeurig de afstand te meten. De sensor bestaat uit een processoreenheid, echoverwerkingseenheid, laserzender, laserontvanger en andere componenten.
Elke seconde stuurt de laserzender een miljoen laserpulsen naar het te detecteren object, die vervolgens terugkeren naar de ontvanger. De processor berekent de tijd die de laserpuls nodig heeft om het object te bereiken en terug te keren, waardoor de afstandswaarde kan worden berekend.
Deze waarde wordt bepaald door het gemiddelde te nemen van duizenden metingen met behulp van de pulstijdmethode. Hoewel de laserecho-analysemethode geschikt is voor langeafstandsdetectie, heeft deze een lagere nauwkeurigheid dan de lasertriangulatiemethode. De verste detectieafstand die deze methode kan bereiken is 250 meter.
Laserafstandssensoren worden veel gebruikt om verschillende fysieke grootheden te meten, zoals lengte, afstand, trillingen, snelheid en oriëntatie. Deze sensoren hebben ook toepassingen gevonden in foutdetectie en bewaking van luchtverontreinigende stoffen.
Er wordt een lasersensor gebruikt om de dikte van metalen platen.
Het detecteren van veranderingen in dikte kan helpen bij het identificeren van rimpels, kleine gaatjes of overlappingen, waardoor defecten aan de machine worden voorkomen.
Plaats het te meten onderdeel in de aangewezen positie op de transportband. De lasersensor detecteert dan het component en meet het tegelijkertijd met de getriggerde laserscanner, om uiteindelijk de lengte te bepalen.
Plaats meerdere lasersensoren in de kantelrichting van het te meten werkstuk. De meetwaarde kan direct via een van de sensoren worden uitgestuurd. Daarnaast kan een softwareprogramma worden gebruikt om de meetwaarde te berekenen op basis van de signalen of gegevens en het resultaat te leveren.
Plaats de gemeten componenten tussen twee laserscanners en lees vervolgens de gegevens uit via de sensor om de nauwkeurigheid en volledigheid van de componentgrootte te detecteren.
De lasersensor is geïntegreerd in het productieproces van vulproducten. Wanneer de vulproducten door de sensor gaan, kan deze nauwkeurig detecteren of ze volledig gevuld zijn. De sensor maakt gebruik van een geavanceerd programma van laserstraalreflectie op het oppervlak om nauwkeurig te bepalen of het vullen van de producten aan de norm voldoet en wat de hoeveelheid van de producten is.
Ten eerste heb je 2 tot 3 laserafstandssensoren nodig voor een gecombineerde meting, zoals geïllustreerd in de afbeelding.
Plaats vervolgens de drie laserafstandssensoren in een rechte lijn, parallel aan de productielijn, en bepaal de onderlinge afstand op basis van de gewenste meetnauwkeurigheid.
Laat ten slotte het object bewegen in een richting die evenwijdig is aan de installatielijn van de laserafstandssensoren.
Als de productielijn is uitgelijnd met de installatielijn van de sensor, is de rechtheid van het object slechter naarmate het verschil in afstand tussen de drie sensoren groter is. Omgekeerd geeft een kleiner verschil in afstand gemeten door de drie sensoren aan dat het object rechter is.
Je kunt het percentage rechtheid berekenen door rekening te houden met de lengte van het te meten object en de afstand tussen de drie sensorinstallaties, wat resulteert in een kwantificeerbaar uitgangssignaal.
Met deze opstelling heb je met succes het doel bereikt om de rechtheid van objecten te detecteren.
Vermogen oplossen:
De resolutie van een wervelstroomsensor kan oplopen tot 0,1 mm, wat vergelijkbaar is met die van een laserafstandssensor.
Lineariteit:
De lineariteit van een wervelstroomsensor is doorgaans laag, rond 1% van het meetbereik. Aan de andere kant hebben high-end laserafstandssensoren een lineariteit van ongeveer 0,1%.
Meetomstandigheden:
Wervelstroomsensoren vereisen dat het testobject een geleidend en niet-magnetisch materiaal is, zoals aluminium of koper, maar geen ijzer.
Laserafstandssensoren daarentegen kunnen zowel magnetische als geleidende objecten meten.
De precisie van capacitieve verplaatsingssensoren is ongelooflijk hoog en overtreft die van laserverplaatsingssensoren. Hun bereik is echter vrij beperkt, meestal minder dan 1 mm. Lasersensoren hebben daarentegen een veel groter bereik, met een maximaal meetbereik tot 2 meter.
Het meetprincipe van een optische vezelverplaatsingssensor is het bepalen van de verplaatsing van een object door veranderingen in de lichtstroom en de lichtintensiteit te detecteren die door de verplaatsing op het objectoppervlak worden gereflecteerd.
De sonde van de sensor bestaat uit een zendende optische vezel en een ontvangende optische vezel.
Voor kleine voorwerpen worden conventionele contactloze verplaatsingssensoren beperkt door het reflectiegebied, wat resulteert in slechte meetprestaties. De optische vezelverplaatsingssensor kan echter worden ontworpen met een zeer kleine sonde (met een minimale diameter van 0,2 mm), waardoor deze geschikt is voor het meten van kleine voorwerpen.
Bovendien kan het worden gemaakt in de vorm van lineaire transmissie en ontvangst.
De verplaatsingswaarde wordt berekend door de mate van afscherming van het object naar de optische vezel te meten tijdens het verplaatsingsproces, met een nauwkeurigheid tot 0,01um.
Het maximale meetbereik van de sensor is 4 mm.

Als oprichter van MachineMFG heb ik meer dan tien jaar van mijn carrière gewijd aan de metaalbewerkingsindustrie. Door mijn uitgebreide ervaring ben ik een expert geworden op het gebied van plaatbewerking, verspaning, werktuigbouwkunde en gereedschapsmachines voor metalen. Ik denk, lees en schrijf voortdurend over deze onderwerpen en streef er voortdurend naar om voorop te blijven lopen in mijn vakgebied. Laat mijn kennis en expertise een aanwinst zijn voor uw bedrijf.