Já se interrogou sobre como é que as máquinas conseguem movimentos precisos? Este blogue mergulha no fascinante mundo dos modos de controlo de servomotores. Do controlo por impulsos ao controlo analógico, vamos explorar como cada método funciona e onde é melhor aplicado. Prepare-se para descobrir os segredos por detrás da precisão e eficiência das máquinas modernas!
Os servomotores são amplamente utilizados em várias aplicações devido à sua precisão e fiabilidade. Um dos métodos mais comuns de controlo dos servomotores, especialmente em pequenos equipamentos autónomos, é através do controlo por impulsos. Este método é simples e fácil de compreender, o que o torna uma escolha popular para o posicionamento do motor.
Conceito básico de controlo
O modo de controlo por impulsos funciona com base em dois princípios fundamentais:
Contagem total de impulsos: Determina a deslocação do motor. O número de impulsos enviados para o servo motor corresponde diretamente à distância que o motor irá mover. Por exemplo, se um servo motor necessita de 2000 impulsos para completar uma rotação completa, o envio de 1000 impulsos resultará numa meia rotação.
Frequência de impulsos: Isto determina a velocidade do motor. A frequência a que os impulsos são enviados para o motor dita a velocidade a que o motor se vai mover. Uma frequência de impulsos mais elevada resulta numa velocidade mais rápida do motor, enquanto uma frequência mais baixa resulta num movimento mais lento.
Implementação do controlo de impulsos
Para implementar o controlo de impulsos para um servomotor, siga estes passos:
Selecionar o modo de controlo de impulsos: Certifique-se de que o servomotor e o seu controlador estão definidos para funcionar no modo de controlo de impulsos. Normalmente, isto pode ser feito através das definições de configuração do motor ou seleccionando o modo apropriado no software do controlador.
Determinar os requisitos de pulso: Consulte o manual do servo motor para compreender a relação entre os impulsos e o movimento do motor. O manual fornecerá uma tabela ou fórmula indicando quantos impulsos são necessários para movimentos específicos.
Gerar impulsos: Utilize um gerador de impulsos ou um microcontrolador para gerar os impulsos necessários. O gerador de impulsos deve ser capaz de produzir impulsos com a frequência e a contagem desejadas.
Enviar impulsos para o motor: Ligar o gerador de impulsos à entrada do servo motor. O motor recebe os impulsos e move-se em conformidade. Certifique-se de que as ligações estão seguras e que o gerador de impulsos está configurado corretamente.
Exemplo de tabela do manual do servomotor
Eis um exemplo de uma tabela típica de um manual de servomotores:
Forma do impulso de comando
Nome do sinal
Comando de direção positiva
Comando de direção negativa
Diferença de fase de 90 bits
Impulso bifásico fase A + fase B
SINAL DE PULSOS
B é 90 graus mais rápida do que a fase a
B é 90 graus mais lento do que a fase a
Trem de impulsos positivo + trem de impulsos negativo
SINAL DE PULSOS
Impulso + símbolo
SINAL DE PULSOS
Vantagens do controlo por impulsos
Simplicidade: O controlo por impulsos é fácil de implementar e compreender, o que o torna adequado para várias aplicações.
Precisão: Ao controlar o número e a frequência dos impulsos, é possível obter um posicionamento preciso e um controlo da velocidade.
Flexibilidade: O controlo por impulsos pode ser utilizado com vários tipos de servomotores e controladores, proporcionando flexibilidade na conceção do sistema.
Métodos de implementação de drivers de motor controlados por impulsos
No domínio do controlo de motores, particularmente para aplicações de alta velocidade, os métodos de controlo de impulsos são cruciais para determinar o sentido de rotação e a velocidade do motor. Abaixo, exploramos três métodos distintos de controlo de impulsos, cada um com as suas características únicas, vantagens e limitações.
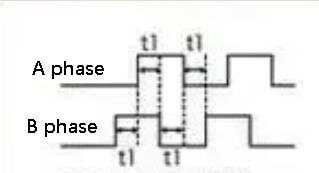
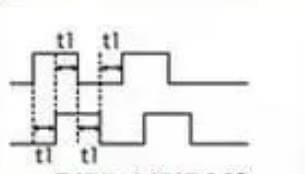
Método 1: Controlo diferencial
Implementação:
O condutor recebe dois impulsos de alta velocidade, designados por 𝑎a e 𝑏b.
O sentido de rotação do motor é determinado pela diferença de fase entre estes dois impulsos.
Se o impulso 𝑏b conduz o impulso 𝑎a em 90 graus, o motor roda na direção positiva.
Se o impulso 𝑏b desfasamento do impulso 𝑎a em 90 graus, o motor roda na direção inversa.
Características:
Pulsos alternados: Os impulsos bifásicos alternam-se, o que dá origem ao termo "controlo diferencial".
Anti-interferência: Este método apresenta maiores capacidades anti-interferência, tornando-o adequado para ambientes com fortes interferências electromagnéticas.
Limitações:
Recursos intensivos: Requer duas portas de impulsos de alta velocidade para um único veio de motor, o que pode ser uma limitação em sistemas com disponibilidade limitada de portas de impulsos de alta velocidade.
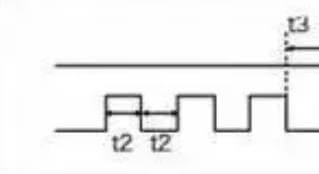
Método 2: Controlo sequencial de impulsos
Implementação:
O condutor continua a receber dois impulsos de alta velocidade, mas estes não existem simultaneamente.
Quando um impulso está ativo, o outro tem de estar inativo.
Um impulso controla a direção positiva, enquanto o outro controla a direção negativa.
Características:
Impulsos sequenciais: Garante que apenas um impulso é emitido em qualquer altura, evitando conflitos de impulsos simultâneos.
Limitações:
Recursos intensivos: Semelhante ao controlo diferencial, este método também requer duas portas de impulsos de alta velocidade para um único veio de motor.
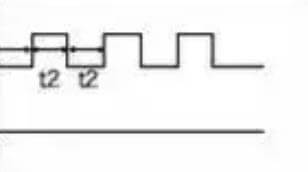
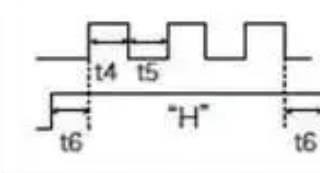
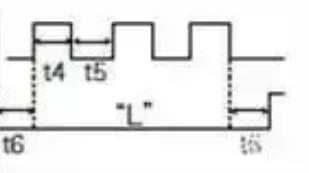
Método 3: Impulso único com sinal IO direcional
Implementação:
O condutor recebe um único sinal de impulso de alta velocidade.
A direção de rotação do motor é controlada por um sinal IO direcional adicional.
Características:
Controlo mais simples: Este método simplifica a lógica de controlo, reduzindo o número de sinais de impulsos necessários.
Eficiência de recursos: Ocupa menos portas de impulsos de alta velocidade, o que o torna ideal para sistemas mais pequenos com recursos limitados.
Limitações:
Anti-interferência inferior: Embora mais simples, este método pode não oferecer o mesmo nível de capacidade anti-interferência que o controlo diferencial.
Resumo
Cada método de controlo de impulsos oferece vantagens distintas e é adequado para diferentes cenários de aplicação:
Controlo diferencial: Ideal para ambientes de elevada interferência devido às suas capacidades anti-interferência superiores, mas requer mais recursos.
Controlo de impulsos sequenciais: Oferece um equilíbrio entre a complexidade do controlo e a utilização de recursos, mas continua a exigir duas portas de impulsos de alta velocidade.
Impulso único com sinal IO direcional: Ideal para pequenos sistemas com recursos limitados, oferecendo simplicidade e eficiência à custa de capacidades anti-interferência potencialmente inferiores.
Ao selecionar um método de controlo, considere os requisitos específicos da sua aplicação, incluindo o nível de interferência, a disponibilidade de recursos e a complexidade do controlo.
2. Modo de controlo analógico do servomotor
Nas aplicações em que é necessário um controlo preciso da velocidade de um servomotor, o controlo analógico pode ser um método eficaz. Este modo utiliza um sinal analógico para regular a velocidade do motor, oferecendo uma abordagem direta e flexível.
Seleção da quantidade analógica
O sinal de controlo analógico pode ser uma tensão ou uma corrente. Cada método tem as suas próprias vantagens e considerações:
Modo de tensão
No modo de tensão, o sinal de controlo é uma tensão específica aplicada à entrada de controlo do servomotor. Este método é relativamente simples de implementar e pode mesmo ser conseguido utilizando um potenciómetro para ajustes manuais. Aqui estão os pontos-chave:
Implementação: Aplicar uma tensão específica à extremidade do sinal de controlo.
Facilidade de utilização: Configuração simples, muitas vezes utilizando um potenciómetro.
Adequação: Ideal para aplicações simples com interferência ambiental mínima.
No entanto, os sinais de tensão são susceptíveis a ruído e interferência, especialmente em ambientes complexos. Isto pode levar a um controlo instável do motor, tornando-o menos fiável em tais cenários.
Modo atual
O controlo em modo de corrente requer um módulo de saída de corrente correspondente para gerar o sinal de controlo. Apesar da necessidade adicional de hardware, os sinais de corrente oferecem vantagens significativas em termos de estabilidade e fiabilidade:
Implementação: Necessita de um módulo de saída de corrente.
Anti-interferência: Forte resistência aos ruídos e interferências ambientais.
Adequação: Ideal para ambientes complexos onde o controlo estável é fundamental.
A natureza robusta dos sinais de corrente torna-os preferíveis em ambientes industriais ou noutras aplicações em que as condições ambientais possam afetar a integridade do sinal.
3. Modo de controlo da comunicação do servomotor
Os servomotores são componentes críticos em várias aplicações industriais, proporcionando um controlo preciso do movimento. O modo de controlo de comunicação para servomotores é essencial para conseguir um funcionamento eficiente e preciso, especialmente em sistemas complexos e de grande escala. Aqui, exploramos os protocolos de comunicação comuns utilizados para o controlo de servomotores e as suas vantagens.
Protocolos de comunicação comuns
CAN (Controller Area Network)
Visão geral: O CAN é uma norma robusta de bus para veículos, concebida para permitir que os microcontroladores e os dispositivos comuniquem entre si sem um computador anfitrião.
Vantagens: Elevada fiabilidade, capacidades em tempo real e mecanismos de deteção de erros.
Aplicações: Amplamente utilizado em sistemas de automação automóvel e industrial.
EtherCAT (Ethernet para tecnologia de automação de controlo)
Visão geral: EtherCAT é um sistema de bus de campo baseado em Ethernet concebido para aplicações de controlo em tempo real.
Vantagens: Comunicação de alta velocidade, baixa latência e capacidades de sincronização.
Aplicações: Ideal para aplicações de elevado desempenho, como robótica, máquinas CNC e sistemas de controlo de movimentos.
MODBUS
Visão geral: MODBUS é um protocolo de comunicação em série originalmente publicado pela Modicon para utilização com os seus controladores lógicos programáveis (PLCs).
Vantagens: Simplicidade, facilidade de implementação e adoção generalizada.
Aplicações: Normalmente utilizado em ambientes industriais para ligar dispositivos electrónicos.
PROFIBUS (Process Field Bus)
Visão geral: O PROFIBUS é um padrão para a comunicação de fieldbus na tecnologia de automação.
Vantagens: Elevada velocidade de transmissão de dados, fiabilidade e amplas capacidades de diagnóstico.
Aplicações: Utilizado na automatização de fábricas e de processos.
Vantagens do controlo de comunicação em servomotores
A utilização de protocolos de comunicação para controlar servomotores oferece várias vantagens, particularmente em aplicações de sistemas complexos e de grande escala:
Escalabilidade: O tamanho do sistema e o número de veios do motor podem ser facilmente ajustados sem alterações significativas na infraestrutura.
Complexidade de cablagem reduzida: O controlo por comunicação reduz a necessidade de cablagem de controlo extensiva, simplificando a instalação e a manutenção.
Flexibilidade: O sistema construído é altamente flexível, permitindo uma fácil integração e reconfiguração dos componentes.
Diagnóstico melhorado: Os protocolos de comunicação incluem frequentemente características de diagnóstico que ajudam a monitorizar e a resolver problemas do sistema.
Controlo em tempo real: Protocolos como o EtherCAT fornecem capacidades de controlo em tempo real, essenciais para aplicações que requerem temporização e sincronização precisas.
4. Expansão dos modos de controlo do servomotor
1. Controlo do binário do servomotor
O modo de controlo do binário permite a definição precisa do binário de saída externo do veio do motor através da entrada de um sinal analógico externo ou da atribuição direta de endereços. Este modo é particularmente útil em aplicações onde é crucial manter uma tensão consistente do material.Exemplo:
Se uma entrada de 10V corresponder a 5 Nm de binário, então uma entrada de 5V resultará numa saída de binário de 2,5 Nm.
Quando a carga no veio do motor é inferior a 2,5 Nm, o motor roda para a frente.
Quando a carga externa é igual a 2,5 Nm, o motor permanece parado.
Quando a carga excede 2,5 Nm, o motor inverte a direção (comum em sistemas com carga gravitacional).
Aplicações:
Dispositivos de enrolamento e desenrolamento, como os utilizados no fabrico de têxteis ou no equipamento de extração de fibras ópticas, em que a tensão do material deve permanecer constante.
Podem ser efectuados ajustes em tempo real à definição do binário alterando a entrada analógica ou alterando o valor através de protocolos de comunicação, assegurando uma tensão consistente do material apesar das alterações no raio de enrolamento.
2. Controlo da posição do servomotor
No modo de controlo de posição, a velocidade de rotação do motor é tipicamente determinada pela frequência dos impulsos de entrada externos, enquanto o ângulo de rotação é controlado pelo número de impulsos.Características:
Alguns sistemas servo permitem a atribuição direta de valores de velocidade e de deslocamento através de comunicação.
Este modo oferece um controlo preciso da velocidade e da posição, o que o torna ideal para aplicações que exigem elevada precisão.
Aplicações:
Dispositivos de posicionamento
Máquinas-ferramentas CNC
Máquinas de impressão
3. Modo de velocidade do servo motor
O modo de velocidade permite o controlo da velocidade de rotação do motor através de entrada analógica ou frequência de impulsos.Características:
Com o controlo PID de circuito externo de um dispositivo de controlo superior, o modo de velocidade também pode ser utilizado para posicionamento.
O sinal de posição do motor ou da carga direta deve ser reenviado ao computador superior para processamento.
Suporta a deteção direta da posição do anel exterior da carga, em que o codificador do veio do motor apenas mede a velocidade e um dispositivo separado na extremidade da carga fornece o sinal de posição.
Vantagens:
Reduz os erros na transmissão intermédia
Melhora a precisão geral do posicionamento do sistema
4. Compreender os três ciclos
Os sistemas servo funcionam normalmente utilizando três sistemas de regulação PID de feedback negativo em circuito fechado: o circuito de corrente, o circuito de velocidade e o circuito de posição.Loop atual:
O loop mais interno, gerido inteiramente dentro do servo condutor.
Detecta e ajusta a corrente de saída de cada fase do motor utilizando um dispositivo Hall.
Controla o binário do motor com uma carga computacional mínima e uma resposta dinâmica rápida.
Speed Loop:
O segundo circuito, que utiliza o feedback do codificador do motor.
A saída PID do circuito de velocidade define o circuito de corrente, o que significa que o controlo da velocidade inclui inerentemente o controlo da corrente.
Essencial para qualquer modo de controlo, uma vez que o circuito de corrente constitui a base do controlo.
Posição Loop:
O circuito mais exterior, que pode ser configurado entre o condutor e o codificador do motor ou entre um controlador externo e o codificador do motor/carga final.
A saída interna do circuito de controlo de posição define o circuito de velocidade, sendo necessário o funcionamento dos três circuitos no modo de controlo de posição.
Este modo envolve o maior esforço computacional e tem a resposta dinâmica mais lenta.
Conclusão
Compreender os diferentes modos de controlo e o sistema de três circuitos dos servomotores é essencial para otimizar o seu desempenho em várias aplicações industriais. Cada modo oferece vantagens únicas e é adequado a tarefas específicas, assegurando um controlo preciso do binário, da posição e da velocidade.
Como fundador da MachineMFG, dediquei mais de uma década da minha carreira à indústria metalúrgica. A minha vasta experiência permitiu-me tornar-me um especialista nos domínios do fabrico de chapas metálicas, maquinagem, engenharia mecânica e máquinas-ferramentas para metais. Estou constantemente a pensar, a ler e a escrever sobre estes assuntos, esforçando-me constantemente por me manter na vanguarda da minha área. Deixe que os meus conhecimentos e experiência sejam uma mais-valia para a sua empresa.
Os sistemas servo são parte integrante dos produtos electromecânicos, proporcionando o mais elevado nível de resposta dinâmica e densidade de binário. Por conseguinte, a tendência no desenvolvimento de sistemas de acionamento é substituir os...
No mundo acelerado da automação industrial, os servomotores são os heróis anónimos que impulsionam a precisão e a eficiência. Mas com inúmeros fabricantes a disputar a atenção, como é que se sabe quais são...
Já se interrogou sobre como configurar um servo controlador para obter o máximo desempenho? Este guia abrange tudo o que precisa de saber sobre o ajuste dos parâmetros de ganho, desde o controlo da posição até à regulação da velocidade....
Escolher o servomotor certo para o seu projeto pode ser uma tarefa difícil com tantas opções disponíveis. Este artigo simplifica o processo, analisando as principais considerações: aplicação...
Com a melhoria da relação custo/desempenho do equipamento de imagiologia e a velocidade do processamento de informações informáticas, juntamente com o aperfeiçoamento das teorias relacionadas, a tecnologia servo de visão cumpriu as condições técnicas...
Como é que as máquinas modernas conseguem um controlo preciso em tarefas complexas? Os sistemas servo são a resposta. Este artigo analisa os princípios subjacentes aos servo-sistemas, explorando o seu funcionamento e as...
Já se interrogou como é que as máquinas seleccionam o motor perfeito? Este artigo revela o processo fascinante por detrás da escolha do servomotor correto para várias tarefas mecânicas. Mergulhe para compreender os cálculos...
O que é que torna os servomotores e os motores passo a passo distintos, mas essenciais nas máquinas modernas? Este artigo explora as suas diferenças fundamentais, vantagens e aplicações específicas. Ao ler, ficará a conhecer melhor as suas...
Já alguma vez se perguntou porque é que o seu servomotor treme subitamente, perturbando o bom funcionamento da sua máquina? Este artigo revela as causas comuns por detrás da vibração do servomotor e fornece soluções práticas para...