O guia definitivo para codificadores: Tipos, aplicações e benefícios
Já alguma vez se perguntou como é que as máquinas sabem exatamente a sua posição e velocidade? Este artigo explora o fascinante mundo dos codificadores, sensores cruciais para a deteção de movimentos mecânicos. Ficará a conhecer os diferentes tipos de codificadores, os seus princípios de funcionamento e as suas aplicações nas máquinas modernas. Prepare-se para descobrir os segredos por detrás da precisão dos controlos de motores e muito mais!
Os codificadores são um tipo de sensor utilizado principalmente para detetar a velocidade, a posição, o ângulo, a distância ou a contagem do movimento mecânico.
Para além de serem utilizados em máquinas, muitos controlos de motores, como os servomotores, necessitam de codificadores para fornecer feedback para a comutação, velocidade e deteção de posição ao controlador do motor.
2. Classificação dos codificadores
O codificador pode ser dividido em codificador analógico e codificador digital. O codificador analógico pode ainda ser dividido em transformador rotativo e codificador Sin/Cos, enquanto o codificador digital pode ser dividido em codificador incremental e codificador absoluto.
3. Princípios de funcionamento dos codificadores comummente utilizados
3.1 Princípio dos codificadores digitais
1)Utilize acopladores fotoeléctricos para digitalizar um disco segmentado instalado num eixo mecânico.
O código mecânico é convertido em sinais de impulsos eléctricos proporcionais.
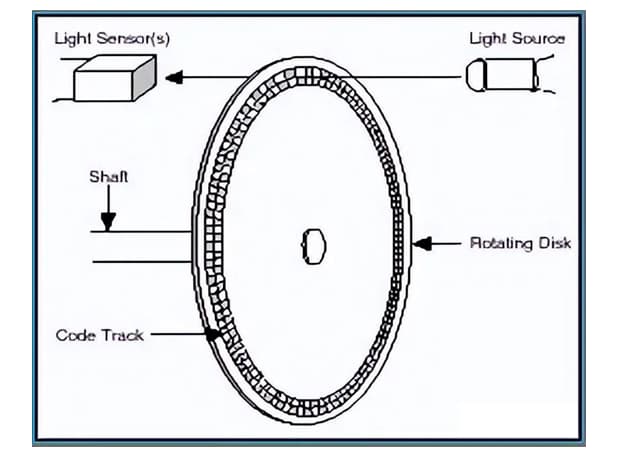
A fonte de luz (geralmente um LED) emite um feixe de luz estreito em direção ao recetor (que pode ser um fotodíodo). Tanto a fonte de luz como o recetor estão rigorosamente instalados em partes estacionárias da chumaceira de ligação rotativa.
O codificador é um disco de sombreamento com uma abertura ou janela transparente, que é instalado na parte rotativa do rolamento.
3.2 Princípio dos codificadores digitais fotoeléctricos
Quando o rolamento roda, o codificador permite que o feixe de luz passe através da pequena janela no disco.
O fotodíodo emite sinais correspondentes de nível alto ou baixo à medida que a posição muda. A saída do fotodíodo pode ser convertida em informação sobre a posição e a velocidade através de um circuito especializado.
3.2.1 Saída dos encoders incrementais
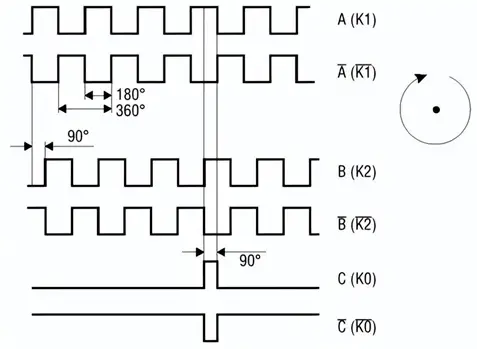
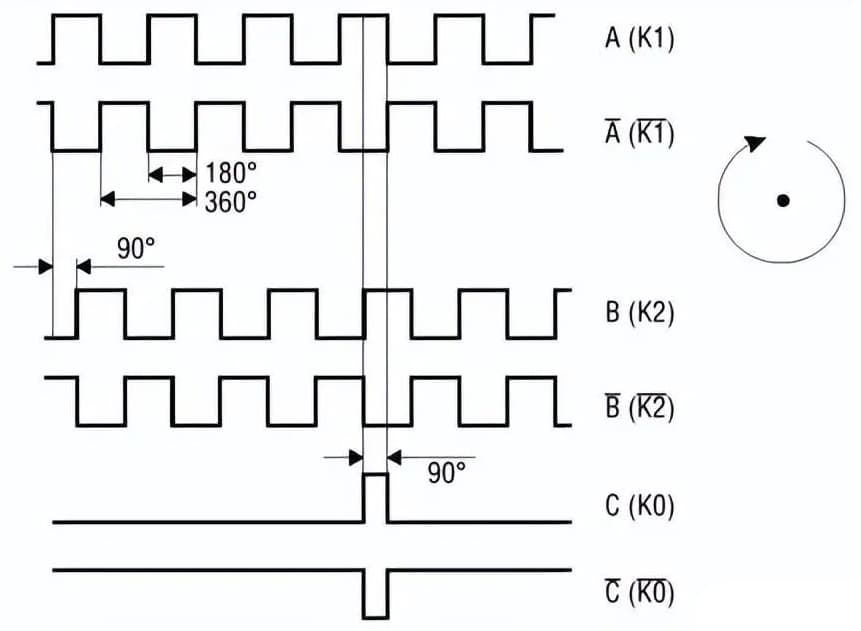
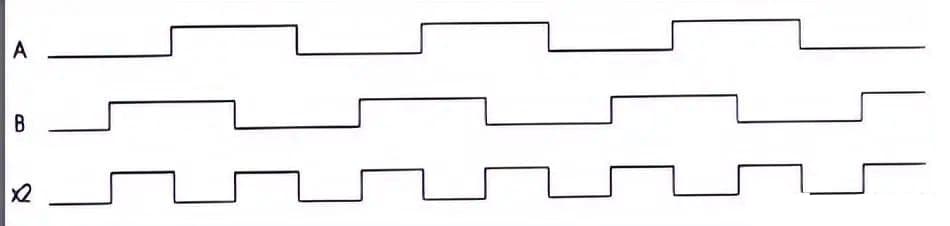
A saída do codificador incremental consiste num disco fotoelétrico de eixo central com marcações circulares transparentes e opacas, que são lidas por componentes emissores e receptores fotoeléctricos para obter sinais de onda quadrada combinados como A, B, -A, -B.
Cada par de sinais tem uma diferença de fase C de 90 graus (um ciclo é igual a 360 graus).
Além disso, existe um sinal de calibração do ponto zero e o codificador emite um sinal por rotação do disco.
Diagrama esquemático de saída do codificador incremental
3.2.2 Princípios de ligação dos encoders incrementais
1. Ligação monofásica
Utilizado para contagem unidirecional e medição de velocidade unidirecional.
2. Ligação bifásica A-B
Utilizado para contagem bidirecional e determinação da direção e da velocidade.
3. Ligação trifásica A-B-C
Utilizado para determinar a velocidade com correção da posição de referência.
A ligação A-A-B-B-C-C tem uma corrente de ligação de sinal negativo simétrico, que tem uma atenuação mínima e uma forte anti-interferência, e pode ser emitida a longas distâncias.
Como determinar a direção
Uma vez que A e B estão 90 graus fora de fase, a direção pode ser determinada detectando se A ou B ocorre primeiro.
Como efetuar a calibração da posição zero
Durante a transmissão dos impulsos do codificador, podem ocorrer erros devido a razões como interferências, resultando em erros de transmissão.
Nesta altura, é necessário efetuar uma calibração atempada da posição zero.
O codificador C emite um impulso em cada rotação, que se chama um impulso de zero ou um impulso de identificação, e é utilizado para determinar a posição zero ou de identificação.
Para medir com precisão o impulso zero, independentemente do sentido de rotação, o impulso zero é emitido como uma combinação de alto nível de dois canais.
Devido à diferença de fase entre os canais, o impulso zero tem apenas metade do comprimento do impulso.
Diagrama esquemático da correção do ponto zero
3.2.3 Multiplicador de Encoders Incrementais
Devido a limitações tecnológicas e de amostragem, é impossível obter uma divisão física mais fina e precisa do disco de codificação.
No entanto, é possível obter impulsos mais elevados através da conversão de circuitos digitais.
Sinal de dupla frequência
Obtido por conversão "exclusiva ou" das fases A e B.
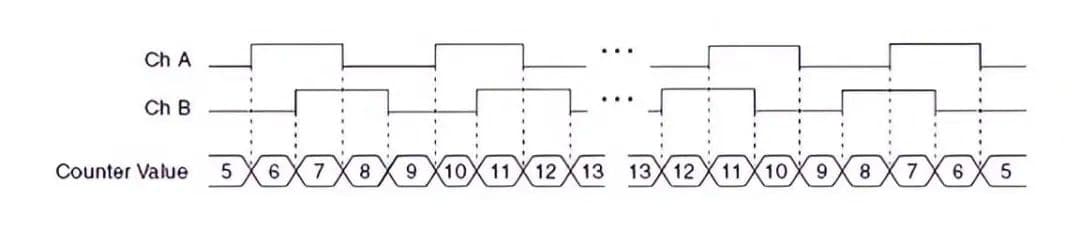
Sinal de frequência quádrupla
O contador também aumenta ou diminui em cada borda dos canais A e B. A direção do contador é determinada por qual canal lidera o outro.
O número no contador aumenta ou diminui em 4 em cada ciclo.
3.2.4 Características dos Encoders Incrementais
O codificador emite um sinal de impulso para cada ângulo de rotação pré-definido e o ângulo de rotação é calculado através da contagem do número de sinais de impulso.
Por conseguinte, os dados de posição emitidos pelo codificador são relativos.
Uma vez que é utilizado um sinal de impulso fixo, a posição inicial do ângulo de rotação pode ser definida arbitrariamente.
Devido à utilização de codificação relativa, os dados do ângulo de rotação perdem-se e têm de ser repostos após uma falha de energia.
3.2.5 Problemas com codificadores incrementais
1) Os encoders incrementais têm erros acumulados no ponto zero.
2) Têm uma fraca capacidade anti-interferência.
3) O dispositivo recetor tem de ser desligado e a posição de referência tem de ser reencontrada após cortes de energia ou paragens.
O aparecimento de codificadores absolutos resolve estes problemas.
3.3 Princípio do Codificador Absoluto
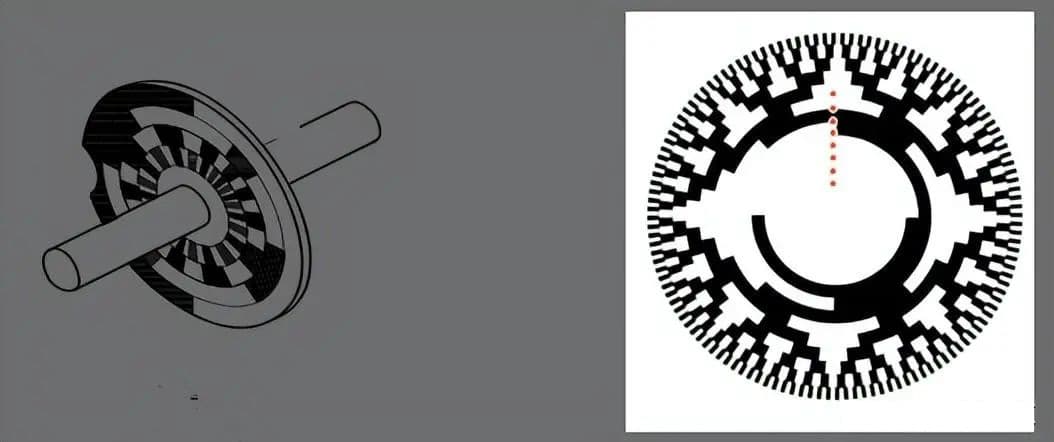
Um codificador absoluto tem um disco de código de luz com vários canais de luz e linhas gravadas nele.
Cada canal é codificado utilizando 2, 4, 8, 16, etc. linhas em sequência.
Em cada posição do codificador, os canais de luz são lidos e o seu estado ligado/desligado é utilizado para obter um código binário único, conhecido como código de Gray, que varia entre 2^0 e 2^(n-1), em que n é o número de bits do codificador absoluto.
A posição do codificador é determinada mecanicamente pelo disco de código luminoso, pelo que não é afetada por cortes de energia ou interferências.
3.3.1 Disco de código do codificador absoluto
O disco de código de luz é digitalizado por um grupo de acopladores fotoeléctricos para obter o código único em cada posição. Cada posição tem o seu próprio código único.
Os números inteiros adjacentes na sua representação numérica têm apenas uma diferença, o que pode evitar a ocorrência de grandes picos de corrente no circuito de conversão digital (como 3-4, 0011-0100).
Formato de conversão do código Binário-Gray:
Os dígitos mais altos são retidos e o segundo dígito mais alto é obtido efectuando uma operação de "exclusivo ou" sobre os dígitos mais altos e o segundo dígito mais alto (em binário).
Referência para códigos decimais e códigos Gray.
Decimal
Código cinzento
0
0000
1
0001
2
0011
3
0010
4
0110
5
0111
6
0101
7
0100
Decimal
Código cinzento
8
1100
9
1101
10
1111
11
1110
12
1010
13
1011
14
1001
15
1000
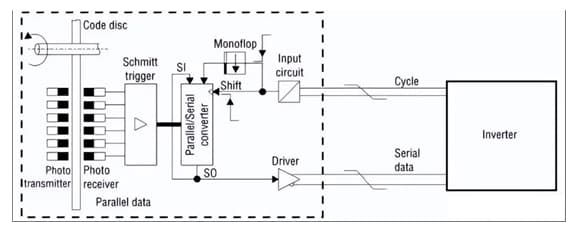
3.3.2 Formatos de saída dos codificadores absolutos
1. Modo de saída em paralelo
Neste modo, existe um cabo para cada bit de dados (canal de bits), e o nível de sinal (alto ou baixo) em cada cabo representa um 1 ou um 0.
O dispositivo físico é semelhante a um codificador incremental e tem diferentes tipos, tais como PNP aberto em coletor, NPN, acionamento diferencial, push-pull e diferencial eficaz alto ou baixo com base no formato do dispositivo físico.
A saída paralela tem geralmente a forma de um código de Gray, também designado por codificador de código de Gray.
2. Saída da interface série síncrona (SSI)
Neste modo, os dados são concentrados e transmitidos através de um grupo de cabos. A saída de dados é ordenada por um protocolo de comunicação que especifica o tempo.
A saída em série utiliza menos linhas de ligação e pode transmitir a distâncias maiores, o que melhora consideravelmente a proteção e a fiabilidade do codificador.
Os encoders absolutos de alto-bit e os encoders absolutos multi-voltas utilizam normalmente saída série.
3. Formato de série assíncrono
Neste modo, as instruções e os dados são trocados através de perguntas e respostas, e a interface é duplex. Um exemplo típico é a interface RS485, que requer apenas dois cabos.
O conteúdo dos dados pode ser o valor da posição do codificador ou outro conteúdo solicitado pela instrução.
Por exemplo, se for adicionado um endereço para cada codificador, vários codificadores podem partilhar o cabo de transmissão e a receção subsequente. Esta forma é designada por tipo de fieldbus.
4. Princípio do codificador híbrido
A codificação incremental e a codificação absoluta estão ambas integradas no mesmo disco.
O círculo mais exterior do disco contém riscas incrementais de alta densidade, enquanto a parte central é o canal de código cinzento binário do codificador absoluto.
A rotação do disco é indicada através da contagem do número de impulsos por rotação, e o ângulo rodado numa semana é contado através do valor numérico do código de Gray.
Codificador absoluto multi-voltas: Com base no codificador absoluto de volta única, o princípio do mecanismo de engrenagem do relógio é utilizado para transmitir a rotação do disco central a outro conjunto de discos (ou vários conjuntos de engrenagens e discos) através da transmissão por engrenagem, o que acrescenta a codificação do número de voltas com base na codificação de volta única para expandir a gama de medição do codificador.
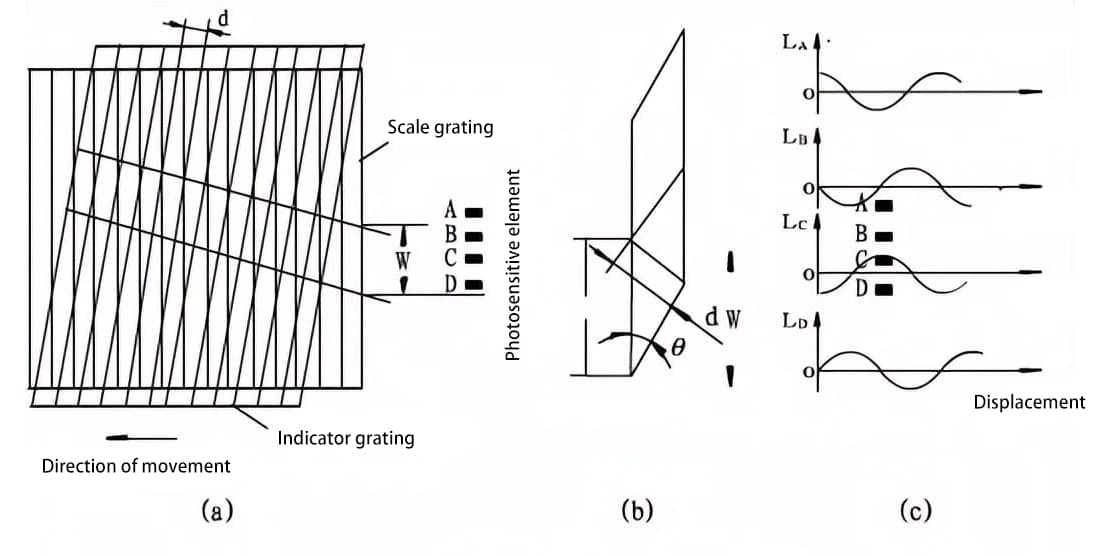
Quando uma luz paralela passa através de uma grelha, a intensidade das franjas de Moiré produzidas aproxima-se de uma função cosseno.
Ao colocar quatro franjas de Moiré de 1/4 de elementos fotossensíveis na direção do movimento da franja de Moiré, podem ser obtidos quatro conjuntos de sinais de saída de seno e cosseno.
Forma de saída do codificador seno-cosseno
Figura Princípio de funcionamento da grelha
Codificador Linear
Um codificador linear mede a distância do percurso linear de um objeto e converte a distância medida num sinal elétrico de saída.
Em termos simples, o princípio consiste em esticar o disco de um codificador rotativo numa linha reta.
Codificador de escala de grelha
O princípio de funcionamento do sensor de deslocamento de grelha é o seguinte: quando a grelha principal (ou seja, a grelha graduada) e a grelha auxiliar (ou seja, a grelha indicadora) do par de grelhas estão relativamente deslocadas, a interferência e a difração da luz produzem um padrão regular de riscas a preto e branco (ou claro-escuro), denominado franja de Moiré.
As riscas a preto e branco (ou claras e escuras) que são iguais são convertidas em sinais eléctricos que mudam de onda sinusoidal através de dispositivos fotoeléctricos.
Após amplificação e modelação por circuitos de modelação, obtêm-se dois sinais de onda sinusoidal ou quadrada com uma diferença de fase de 90 graus, que são enviados para o mostrador digital de grelha para contagem e visualização.
Transformador rotativo
Um transformador rotativo, também conhecido como resolver, é um tipo de micro-motor utilizado para fins de controlo.
É um dispositivo de medição indireta que converte a rotação mecânica num sinal elétrico que está relacionado com o ângulo de rotação através de uma determinada função matemática.
Princípio do transformador rotativo
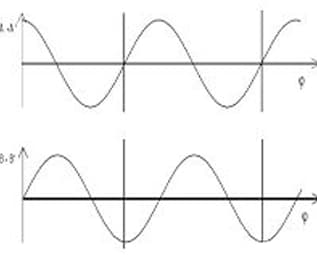
1. Um transformador rotativo é um componente de sinal que emite uma tensão que varia com o ângulo do rotor.
Quando o enrolamento de excitação é excitado por uma tensão alternada de uma determinada frequência, a amplitude da tensão do enrolamento de saída está numa relação de função sinusoidal ou cosseno com o ângulo do rotor, ou mantém uma determinada relação proporcional, ou tem uma relação linear com o ângulo do rotor dentro de um determinado intervalo.
2. A distribuição do fluxo magnético entre o estator e o rotor do transformador rotativo segue uma regra sinusoidal.
Por conseguinte, quando a tensão de excitação é aplicada ao enrolamento do estator, o enrolamento do rotor gera uma força eletromotriz induzida através do acoplamento eletromagnético, como se mostra na figura acima.
A magnitude da tensão de saída depende da posição angular do rotor e, portanto, varia sinusoidalmente com o deslocamento do rotor.
De acordo com o princípio do transformador, assumindo que o número de espiras no enrolamento primário é N1 e o número de espiras no enrolamento secundário é N2, k = N1 / N2 é a relação de espiras. Quando uma tensão alternada é aplicada ao enrolamento primário
Aplicação do transformador rotativo
1. Modo de deteção de fase
O ângulo de fase da tensão induzida é igual ao ângulo de rotação mecânica do rotor.
Por conseguinte, desde que o ângulo de fase da tensão de saída do rotor seja detectado, o ângulo de rotação do rotor é conhecido.
2. Modo de deteção de amplitude
Em aplicações práticas, modificando continuamente o ângulo elétrico da tensão de modulação, a variação do ângulo mecânico pode ser rastreada e a amplitude da tensão induzida pode ser medida para obter o deslocamento do ângulo mecânico.
5. Precauções de instalação dos codificadores
Aspectos mecânicos:
1. Tenha em atenção a carga admissível do veio durante a instalação;
2. Assegurar que a diferença de eixo entre o eixo do codificador e o eixo do utilizador veio de saída é inferior a 0,20 mm e o ângulo de desvio em relação ao eixo é inferior a 1,5°;
3. Durante a instalação, evite bater, deixar cair e colidir para evitar danos no veio e no disco;
4. Em caso de utilização prolongada, verificar regularmente se os parafusos de fixação do codificador estão soltos (uma vez por trimestre).
Aspectos eléctricos:
1)O fio de ligação à terra deve ser o mais grosso possível, geralmente superior a 1,5 milímetros quadrados;
2)Os fios de saída do codificador não devem sobrepor-se uns aos outros para evitar danos no circuito de saída;
3)Os fios de sinal do codificador não devem ser ligados à alimentação DC ou corrente AC para evitar danos no circuito de saída;
4)Os equipamentos, tais como os motores, ligados ao codificador devem estar bem ligados à terra e livres de eletricidade estática.
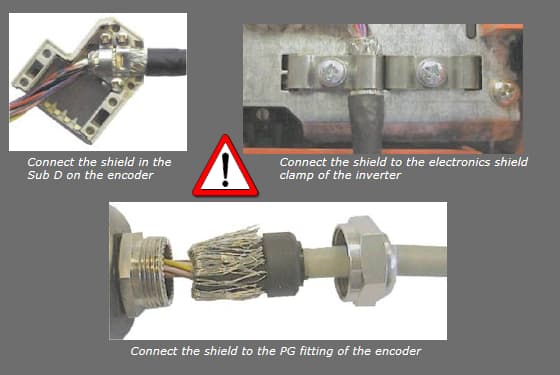
6. Instalação do cabo de proteção do codificador.
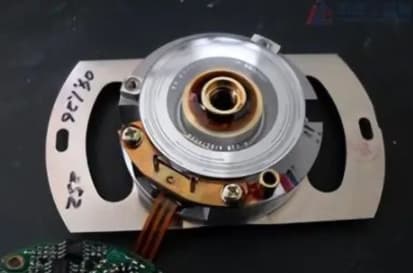
Diagrama da estrutura interna de um codificador rotativo.
Como fundador da MachineMFG, dediquei mais de uma década da minha carreira à indústria metalúrgica. A minha vasta experiência permitiu-me tornar-me um especialista nos domínios do fabrico de chapas metálicas, maquinagem, engenharia mecânica e máquinas-ferramentas para metais. Estou constantemente a pensar, a ler e a escrever sobre estes assuntos, esforçando-me constantemente por me manter na vanguarda da minha área. Deixe que os meus conhecimentos e experiência sejam uma mais-valia para a sua empresa.
Imagine desbloquear a precisão das máquinas-ferramentas com uma simples superfície de vidro. As balanças de grelha linear fazem exatamente isso, transformando linhas finas em medições altamente precisas. Este artigo explora a forma como estas...
Já alguma vez se perguntou como é que as arestas afiadas das peças metálicas são suavizadas? Este processo, conhecido como chanfragem, transforma cantos perigosos e irregulares em superfícies mais seguras e angulares. Neste artigo, vai...
Já se interrogou sobre quais são as melhores marcas de rolamentos do mundo? Nesta publicação do blogue, vamos explorar os principais fabricantes de rolamentos conhecidos pela sua qualidade excecional, inovação e...
Já alguma vez se interrogou sobre quem alimenta o mundo nos bastidores? Nesta publicação do blogue, vamos dar um mergulho profundo nos principais fabricantes de geradores que mantêm as luzes acesas...
É um aspirante a engenheiro mecânico que procura destacar-se na sua área? Nesta publicação do blogue, vamos explorar os 10 principais softwares de design de engenharia mecânica que podem elevar o seu...
Já se interrogou sobre como é assegurada a integridade das porcas e parafusos soldados no seu automóvel? Este artigo revela o processo meticuloso de verificações e inspecções de qualidade que mantêm o seu veículo...
Já alguma vez se perguntou o que mantém um motor elétrico a funcionar sem problemas e sem sobreaquecer? Compreender as temperaturas de funcionamento seguras para os motores é crucial para a sua longevidade e desempenho. Neste artigo,...
Já alguma vez se interrogou sobre o fascinante mundo da fundição? Este processo de fabrico antigo, mas em constante evolução, molda o nosso quotidiano de inúmeras formas. Nesta publicação do blogue, vamos explorar o...
Já alguma vez se perguntou como é que as engrenagens do seu carro ou avião funcionam tão bem? Este artigo revela os principais fabricantes de engrenagens que estão a moldar o futuro da engenharia mecânica. Ficará a saber...