Um guia completo para rolamentos lineares: Tudo o que precisa de saber
Já alguma vez se perguntou qual é a chave para um movimento suave e preciso nas máquinas? Os rolamentos lineares são os heróis anónimos por detrás de inúmeros sistemas automatizados, permitindo a transferência, o manuseamento, o posicionamento e a montagem sem esforço. Nesta publicação do blogue, vamos mergulhar no mundo dos rolamentos lineares, comparando-os com outros componentes de movimento linear e revelando as suas vantagens únicas. Prepare-se para descobrir como estas maravilhas da engenharia podem revolucionar os seus projectos!
1. Rolamentos lineares e outros componentes de guia de movimento linear
Os componentes de guia de movimento linear são os componentes mais utilizados em mecanismos de movimento automatizados para transferência, manuseamento, posicionamento e montagem.
Aqui, iremos comparar rolamentos lineares, guias deslizantes e casquilhos sem óleo, e concentrar-nos na utilização de rolamentos lineares.
(1) Comparação das características dos rolamentos lineares
Uma comparação aproximada das características dos três componentes de guia de movimento linear está resumida na tabela abaixo.
Segue-se uma introdução à relação entre as características acima referidas e a construção.
(2) A correlação entre as características e a construção das peças de guia linear.
1. Diferenças de desempenho no que respeita à capacidade de carga:
Rolamentos lineares e casquilhos autolubrificantes.
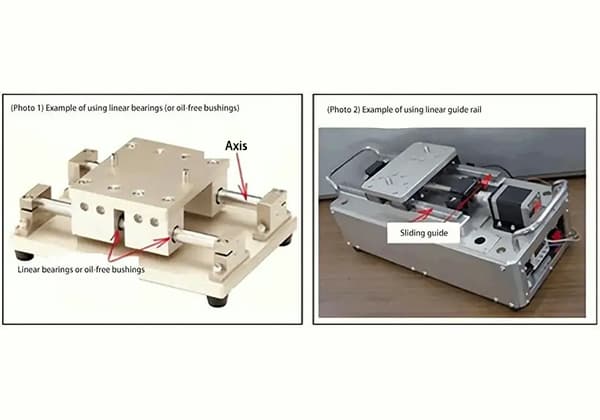
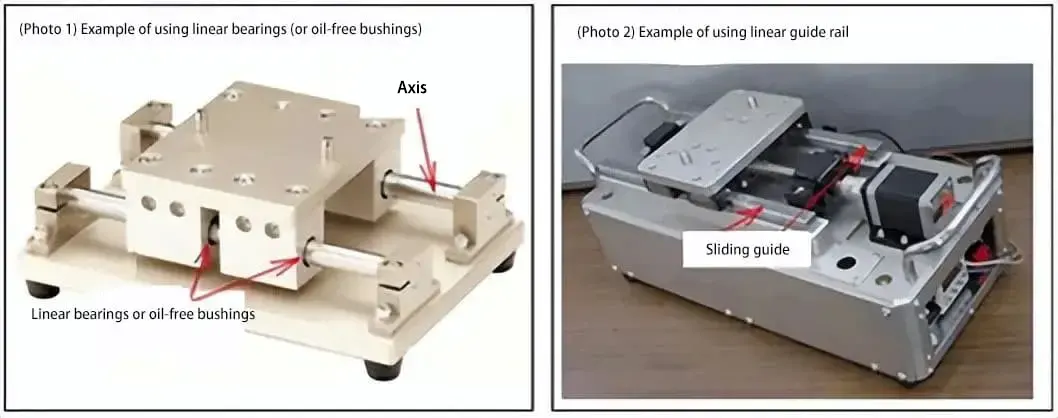
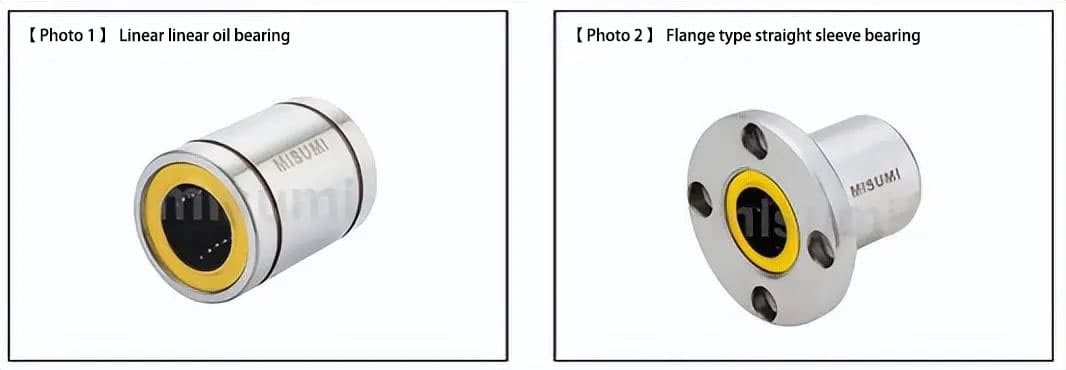
a) Os componentes móveis com rolamentos lineares ou casquilhos autolubrificantes são geralmente montados num veio (calha de guia) suportado por estruturas de apoio em ambas as extremidades para realizar a sua função de movimento. Ao suportar grandes cargas, o eixo é facilmente deformado (ver [foto 1]).
(Além disso, quando a orientação vertical é linear, pode ser utilizada uma estrutura simples que ignora a questão da carga, uma vez que o veio não necessita de suportar a carga do componente móvel).
Guias lineares
b) Os elementos móveis deslocam-se sobre as calhas fixas montadas na base, que tem excelentes características de suporte de carga (ver [foto 2]).
Rolamentos lineares e casquilhos autolubrificantes => Movimento linear sobre um eixo (calha de guia) fixo nas duas extremidades => movimento linear com cargas leves a médias.
Guias lineares => Movimento linear sobre calhas fixas à base => movimento linear com cargas ligeiras a pesadas.
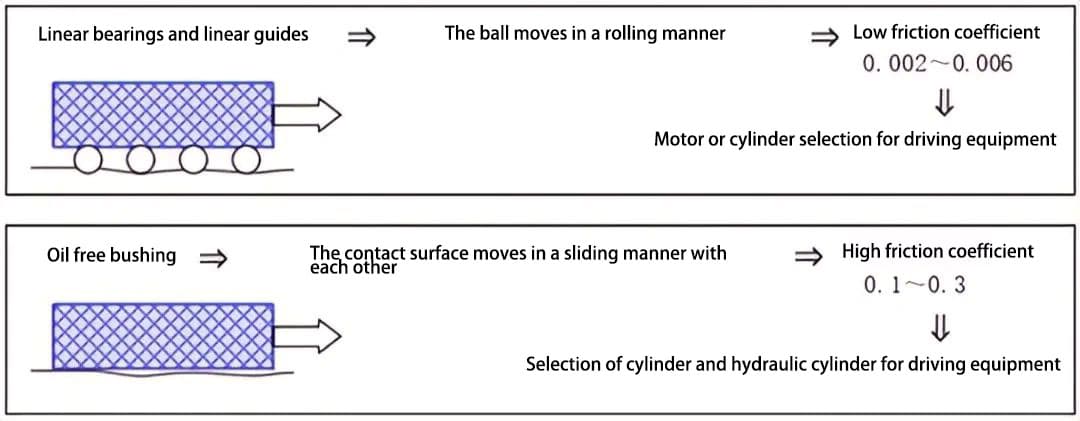
2. Diferenças de desempenho no que respeita ao coeficiente de atrito:
Neste caso, as diferenças no método de deslizamento da guia (deslizamento por rolamento ou por superfície) determinam as diferenças de desempenho. A diferença no coeficiente de atrito está diretamente relacionada com a seleção do atuador de condução.
a) Pequena resistência ao atrito = pequena força de atrito = pode ser acionado por um motor de pequeno binário = o movimento rotativo pode ser convertido em movimento linear.
b) Grande resistência ao atrito = grande força de atrito = requer grande binário ou impulso = pode ser acionado diretamente por um cilindro linear.
Precauções de utilização
A dimensão do coeficiente de atrito afecta a capacidade do equipamento de acionamento e a quantidade de calor gerado durante o funcionamento. Os casquilhos autolubrificantes não são adequados para funcionamento contínuo a alta velocidade com elevada produção de calor.
Quando se utiliza um cilindro, a velocidade inicial/paragem não pode ser controlada como num motor. O funcionamento a alta velocidade e a supressão de vibrações podem ser conseguidos através da instalação de mecanismos de travagem flexíveis, tais como amortecedores e amortecedores.
3. Diferenças de desempenho no que respeita à precisão da guia:
Basicamente, o desempenho é determinado pela folga entre o rolamento e a calha de guia.
a) No caso das chumaceiras lineares, é utilizado um veio cilíndrico como carril de guia e a folga entre a chumaceira e o carril de guia é definida como "ajuste de interferência: g6" ou "ajuste de transição: h5", e a chumaceira desliza num estado de "folga" mínima.
b) Para as guias lineares, são utilizadas calhas de guia dedicadas e são emparelhados rolamentos de alta precisão e calhas de guia com um tipo de pequena folga (0-3 μm) ou tipo pressurizado (-3-0 μm).
c) Em comparação com os rolamentos lineares, os casquilhos autolubrificantes têm uma folga maior entre a calha de guia (veio), o que resulta numa menor precisão na orientação.
Precauções de utilização
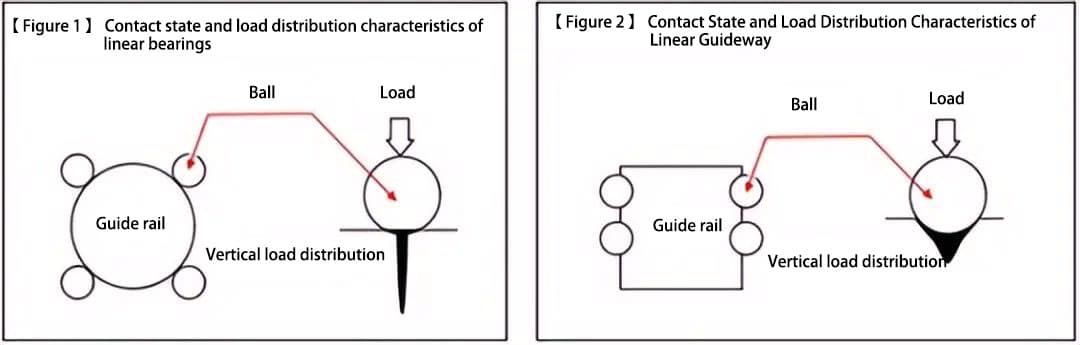
Os estados de contacto entre a esfera e a calha de guia são diferentes para os rolamentos lineares e para as guias lineares. Os rolamentos lineares têm um estado de contacto pontual, em que a parte de contacto suporta localmente uma grande carga.
A porção de contacto entre a calha de guia e o rolamento de esferas nas guias lineares adopta uma forma de ranhura, permitindo que a esfera esteja num estado de contacto de superfície com a superfície da calha de guia, e assim a carga de contacto é dispersa.
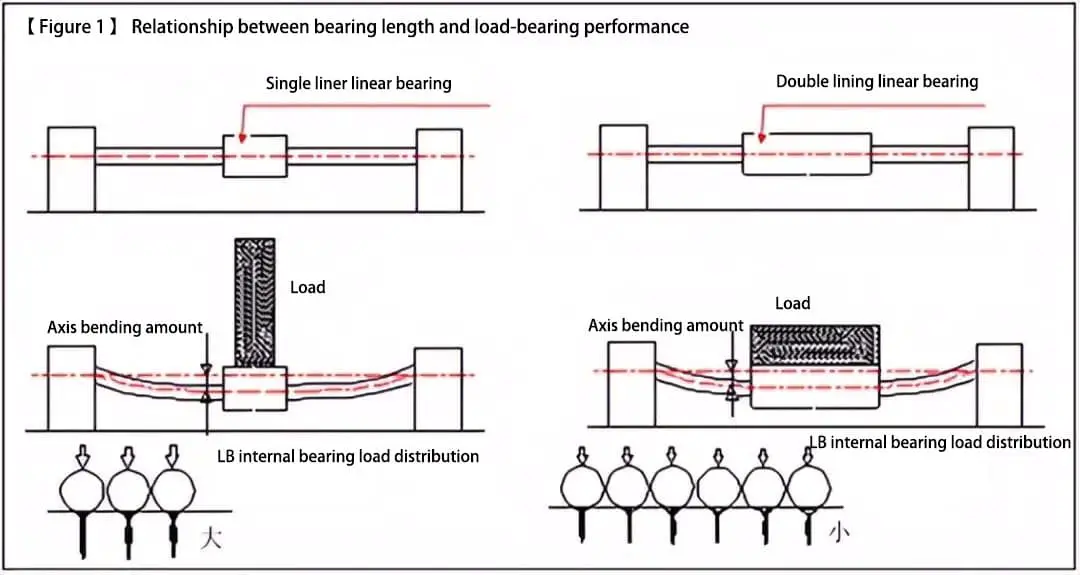
Existem também diferenças nas características da capacidade de carga entre os dois no que diz respeito ao estado de contacto na parte deslizante. ([Figura 1] e [Figura 2])
Rolamentos lineares => estado de contacto pontual => distribuição vertical desigual da carga => não adequado para condições de carga elevada.
Guias lineares => estado de contacto superficial => distribuição vertical dispersa da carga => podem suportar cargas relativamente elevadas.
4. Resistência ao ambiente e facilidade de manutenção:
Esta diferença de desempenho é determinada pelas diferenças nos materiais constituintes.
a) Os rolamentos lineares e as guias lineares podem alcançar uma fiabilidade a longo prazo devido ao efeito do óleo lubrificante (massa lubrificante), pelo que o ambiente de trabalho não pode exceder o índice de resistência ambiental do óleo lubrificante.
b) Os casquilhos autolubrificantes são geralmente utilizados em ambientes onde não há óleo lubrificantee têm boa resistência ambiental e facilidade de manutenção.
2. Distinção entre tipos lineares e flangeados
A seguir, explicamos as diferenças nas formas externas dos rolamentos lineares (tipo linear e tipo flangeado) e as precauções a tomar durante a montagem.
(1) Rolamentos lineares de tipo linear e de tipo flangeado
A [Foto 1] mostra o tipo linear e a [Foto 2] mostra o tipo flangeado.
O tipo flangeado de rolamento linear [Foto 2] tem as seguintes vantagens:
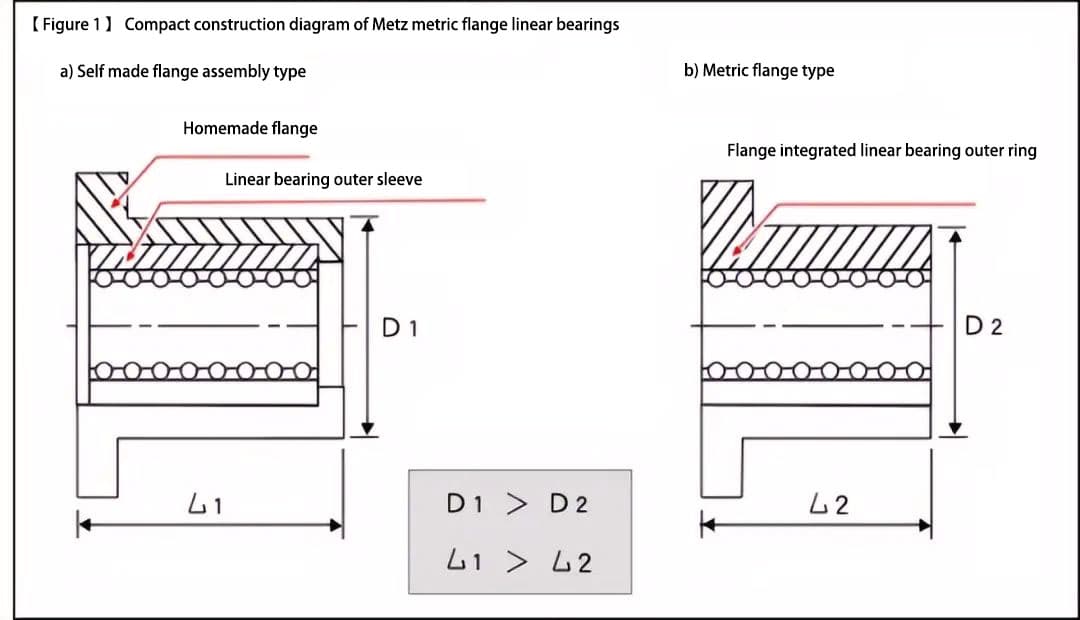
Tem uma estrutura mais compacta, adoptando uma construção integrada de um rolamento linear e uma manga de veio flangeada ([Figura 1]).
Em comparação com um rolamento linear combinado com uma flange produzida separadamente, tem vantagens como o baixo custo, o curto prazo de entrega e a qualidade estável.
A [Figura 1] é um diagrama esquemático que explica a estrutura compacta do rolamento linear com flange. A estrutura de montagem do rolamento linear com flange e a forma da manga do eixo são demasiado longas, enquanto o rolamento linear com flange adopta uma estrutura integrada, que é mais compacta. Este design compacto permite manter o desempenho de suporte de carga.
(2) Distinção entre tipos lineares e tipos de flange
Escolha linear ou flange tipos de rolamentos de acordo com os seguintes critérios: Selecionar os tipos de flange dos rolamentos lineares se estes suportarem carga.
Escolha com base no espaço circundante e nas superfícies de construção à volta da instalação dos rolamentos lineares. Consulte o ponto (3) para conhecer os métodos de instalação e as precauções relativas aos rolamentos lineares.
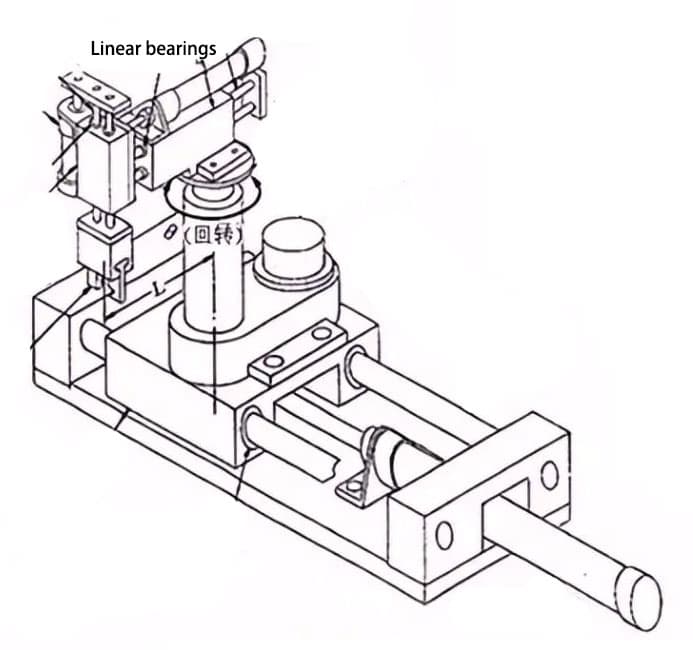
Os rolamentos lineares dividem-se em tipos móveis e fixos ao eixo para rotação do veio. A figura 2 ilustra a construção de uma plataforma accionada por X-Y-Z-θ com o veio como eixo guia. As chumaceiras são classificadas em conformidade.
a) Eixo X: Os rolamentos lineares são automotores e do tipo flange.
b) Eixo Y: Os rolamentos lineares são fixos (na direção do eixo Θ) e permitem o movimento na direção do eixo A.
c) Eixo Z: Os rolamentos lineares são fixos na direção do eixo Z e permitem o movimento na direção do eixo Y.
Para os tipos lineares, selecionar os métodos de fixação por anel de pressão ou por placa de rolha com base na resistência desejada da fixação.
a) A parte móvel do eixo X da secção está sujeita à força de inércia do peso da parte móvel suportada pela chumaceira linear. A chumaceira linear tem de ser bem fixada.
b) A chumaceira linear é fixada ao assento da chumaceira e, devido à utilização de um cilindro para acionar a estrutura do veio, a fixação axial da chumaceira linear apenas suporta a força de reação do atrito, pelo que foi adoptada uma conceção compacta para o tipo linear. Além disso, as chumaceiras lineares do eixo Y são colocadas na direção oposta à dos dois eixos em relação ao eixo de rotação da plataforma de acionamento θ, permitindo uma elevada rigidez em relação ao binário de rotação.
c) Se considerarmos a direção do eixo móvel, é o mesmo que b) e não suportará grandes forças.
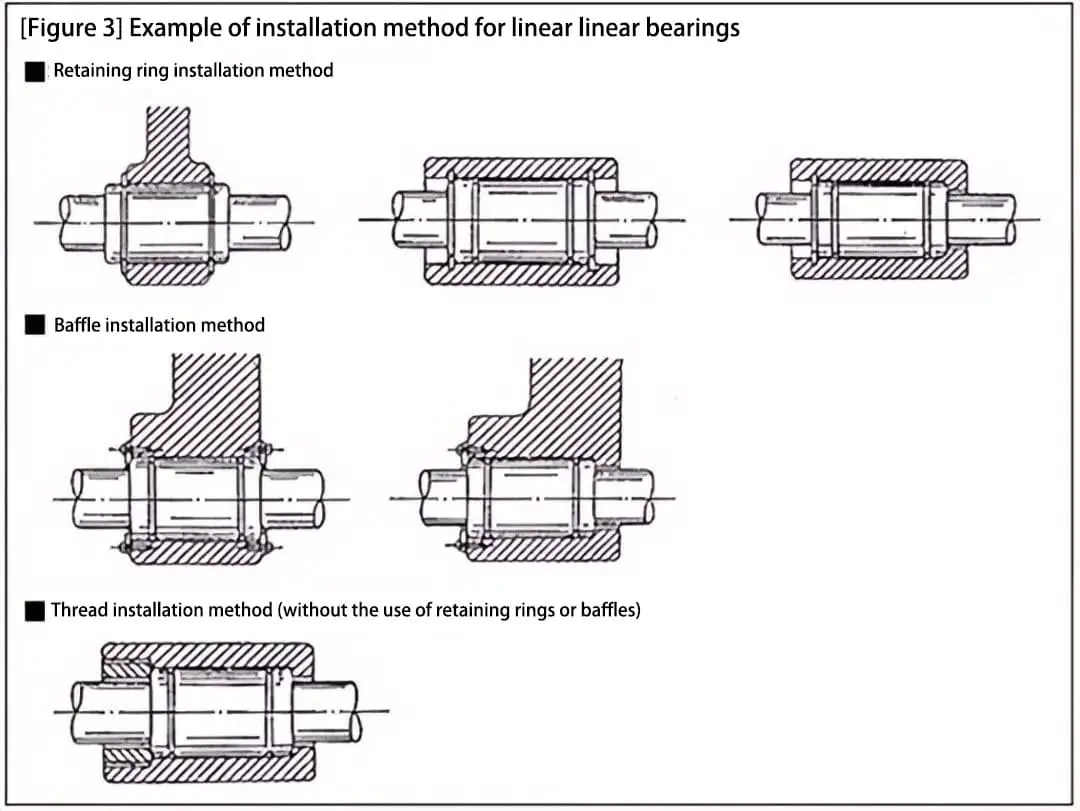
(3) Métodos de instalação e precauções para rolamentos lineares.
(1) Métodos de instalação de rolamentos lineares
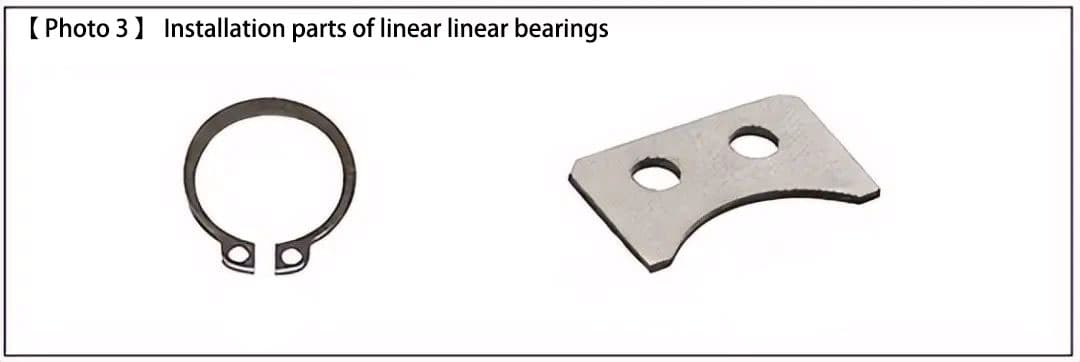
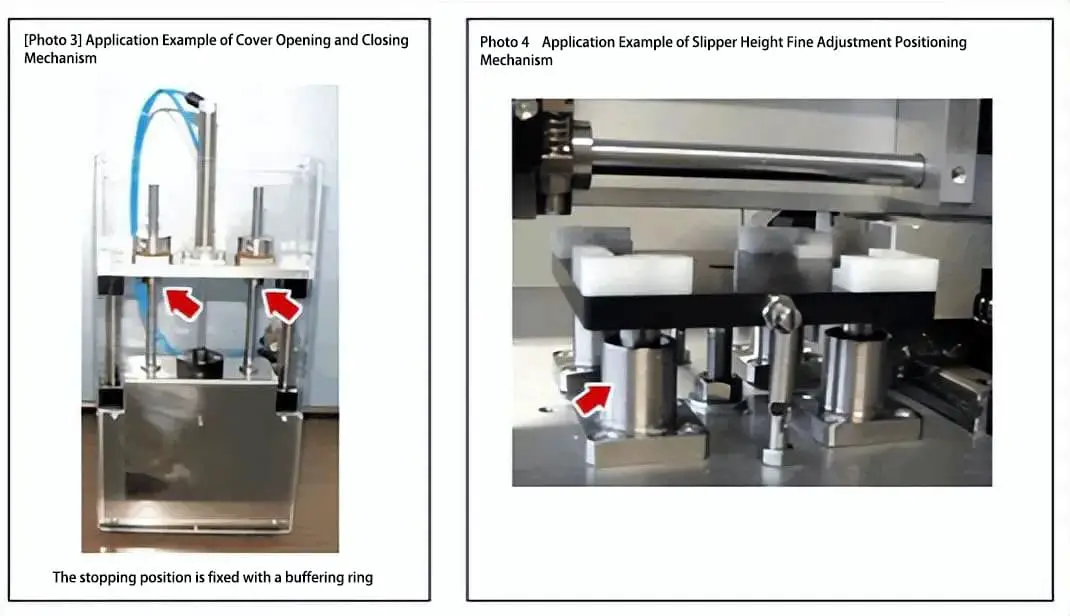
Os rolamentos lineares são geralmente instalados com anéis de pressão ou placas de bloqueio (ver [Foto 3] e [Figura 3]).
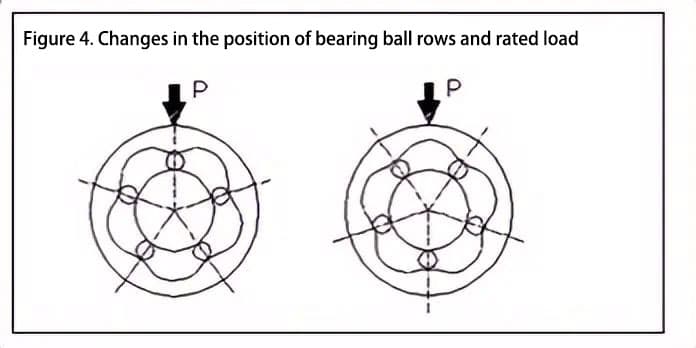
(2) Precauções para o ângulo de instalação dos rolamentos lineares
Devido a diferenças no diâmetro e tipo do eixo, bem como no número de carreiras de esferas no rolamento, os rolamentos lineares têm geralmente 4 a 6 carreiras de esferas dispostas em ângulos iguais. Ao utilizar rolamentos lineares horizontalmente, evite instalá-los com as carreiras de esferas na posição diretamente acima (como mostrado no lado esquerdo da [Figura 4]), pois isso pode resultar em cargas concentradas.
A [Figura 4] mostra um rolamento de esferas de 5 carreiras e o rácio dos valores de carga nominal é mostrado abaixo (lado direito ÷ lado esquerdo). Por conseguinte, a instalação deve ser efectuada o mais próximo possível do ângulo de instalação indicado no diagrama acima.
Carga estática nominal (lado direito ÷ lado esquerdo) = 1,46
Carga dinâmica nominal (lado direito ÷ lado esquerdo) = 1,19
3. Diferenciação entre chumaceiras de revestimento simples, de revestimento duplo, alargadas e com tratamento de superfície.
(1) Comprimento da chumaceira e desempenho da guia
Os rolamentos lineares podem ser divididos em quatro tipos com base no comprimento do rolamento:
[1] de linha única
[2] com revestimento duplo
[3] alargado
[4] concebido pelo cliente (utilizando dois tipos de linha única).
A diferença no comprimento do rolamento afecta diretamente o desempenho do guiamento da seguinte forma:
a) Capacidade de carga
b) Precisão de orientação
a) Relação entre o comprimento da chumaceira e a capacidade de carga
Quanto mais comprido for o rolamento, mais pontos de apoio existem e menor é a carga necessária para cada ponto de contacto do rolamento. Esta conclusão pode ser tirada da situação atual em que a carga nominal dos três tipos [1], [2] e [3] de rolamentos lineares aumenta sequencialmente com o seu comprimento.
Por conseguinte, a escolha de um comprimento de rolamento linear mais longo pode melhorar a capacidade de carga do produto (= aumento do tempo de vida e da fiabilidade) ([Figura 1]).
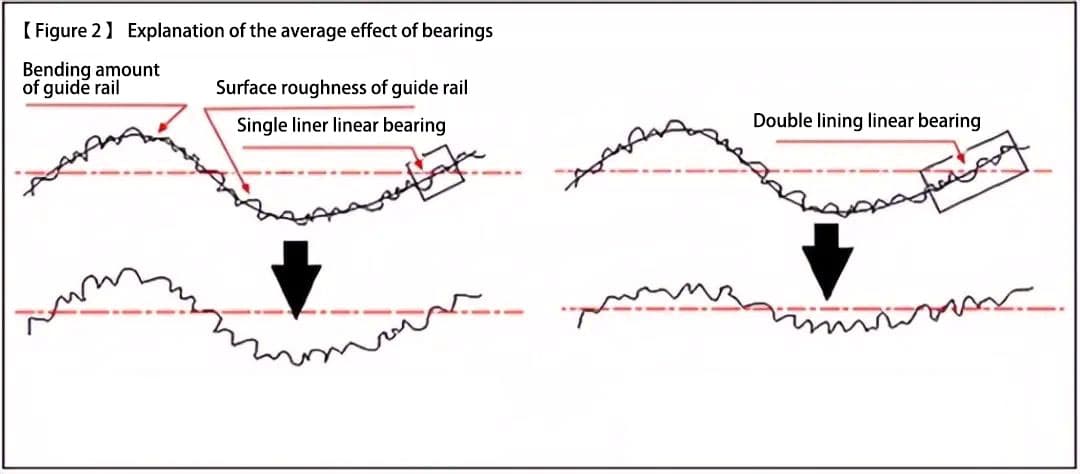
b) Relação entre o comprimento do rolamento e a precisão da guia
Quanto maior for o comprimento do rolamento, maior será a precisão de orientação.
1)
Ao calcular a média do erro de orientação da calha de guia (veio), a precisão do produto pode ser melhorada (consultar a nota correspondente para mais pormenores) ([Figura 2]).
2)
A precisão do produto pode ser melhorada reduzindo o erro de folga entre a calha de guia (veio) ([Figura 3]).
O efeito de média dos rolamentos: Ao aumentar o comprimento do rolamento da guia linear, o número de suportes de rolamento é aumentado e os factores de erro na superfície da guia (rugosidade da superfície e deformação por flexão) podem ser calculados em média, com o efeito do fator de erro suprimido para menos de metade.
Por conseguinte, ao aumentar o comprimento do rolamento, a capacidade de carga e a precisão de orientação podem ser melhoradas.
Por conseguinte, o tipo [4] (que utiliza um design dedicado com dois tipos de linha única) de rolamento linear é frequentemente utilizado em ambientes de trabalho de alta precisão até certo ponto ([Figura 4]).
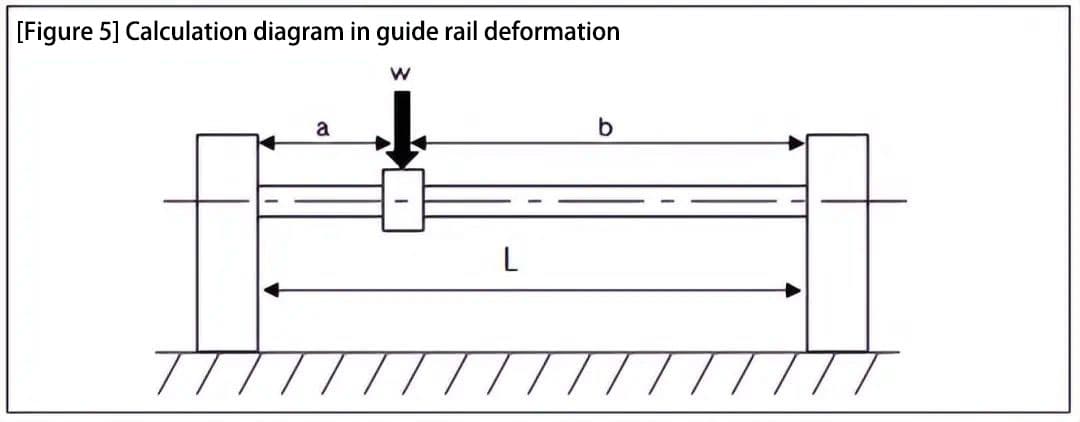
(2) Cálculo da deformação do carril de guia (veio) ([Figura 5])
Num mecanismo linear composto por uma chumaceira linear e um veio, a deformação do veio pode ser calculada utilizando a seguinte equação:
δ = (W * a3 * b3) / (3 * E * I * L3)
onde:
a: Distância entre o ponto final do apoio e a posição da carga
b: Distância entre o ponto final de apoio no lado oposto de a e a posição de carga
L: Distância entre os apoios do veio
E: Módulo de Young
I: Segundo momento da área da secção transversal
I = πd4/64 ≈ 0.05d4
d: Diâmetro do veio
W: Carga suportada pelo rolamento linear (unidade: N)
Quando a = b = L/2, δ = W * L3 / (9,6 * E * d4).
Por conseguinte, se pretender reduzir a deformação do veio, deve adotar uma abordagem de conceção que aumente o diâmetro do veio (4 vezes o efeito) ou encurte a distância entre os apoios do veio (3 vezes o efeito).
(3) Características e exemplos de aplicação dos materiais dos componentes e do tratamento de superfície
Os materiais constituintes, tratamentos de superfícieOs exemplos de aplicação de rolamentos lineares são apresentados no quadro seguinte:
Material do anel exterior
Tratamento de superfície
Material do retentor
Material da bola
Exemplos de aplicações:
SUJ2
–
Equivalente a Resina/SUS440C
SUJ2
Guia deslizante com requisitos gerais de resistência ao desgaste.
Movimento de precisão para componentes ópticos sem reflexo num ambiente sem pó.
SUJ2
Químico Ni-P
O mesmo que acima.
O mesmo que acima.
Peças deslizantes resistentes a produtos químicos em ambientes sem pó que exigem resistência ao desgaste.
Equivalente a SUS440
–
O mesmo que acima.
O mesmo que acima.
Carga ligeira em ambiente sem pó e equipamento utilizado nos sectores alimentar e médico.
Características comparativas dos tratamentos de superfície.
Material do anel exterior:
Tratamento de superfície
Características:
SUJ2
–
O SUJ2 é feito de ferro e é suscetível de enferrujar.
O mesmo que acima.
Cromo preto de baixa temperatura
Baixo coeficiente de atrito e boa resistência ao desgasteCapaz de formar um revestimento fino e uniforme de cor preta que não reflecte a luz e apresenta boa absorção de calor.
O mesmo que acima.
Galvanização química de Ni-P
Excelente resistência aos agentes químicos e à corrosão, frequentemente utilizada em salas limpasRevestimento duro com um acabamento brilhante e não magnético.
4. Exemplo de aplicação de rolamentos lineares em equipamentos automáticos simples
As características dos rolamentos lineares são descritas a seguir:
Rolamentos de orientação simples e de baixo custo com desempenho médio. (Elevada relação custo-benefício)
Baixo coeficiente de atrito, o que facilita a seleção do acionamento. (Cilindro de baixo custo ou tipo de motor de preço médio)
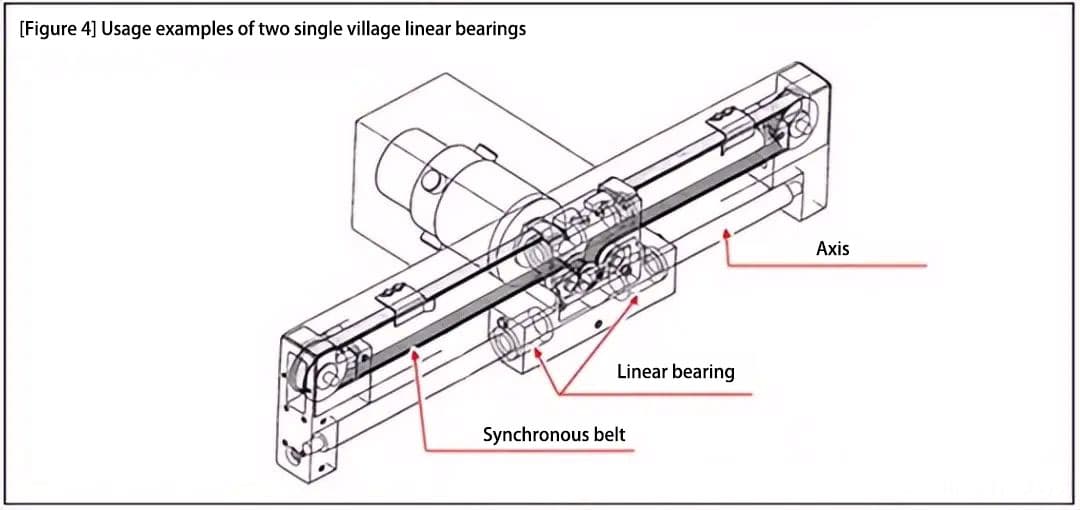
Ao combiná-lo com um correia sincronizadaA construção de uma condução silenciosa e leve pode ser alcançada.
No caso do guiamento direcional vertical, a utilização do método de condução do centro de gravidade permite um design de construção simples e compacto.
A utilização e as características das chumaceiras lineares são explicadas abaixo através de um exemplo da sua aplicação num equipamento automático simples.
(1) Motor passo a passo e transmissão por correia síncrona
A construção da transmissão por correia síncrona tem vantagens como o silêncio, a leveza, o baixo custo e a não necessidade de lubrificação. Para a situação da mesa de trabalho dos eixos X/Y/Z, o conceito de design habitual é reduzir a carga no motor do eixo X inferior, aligeirando o eixo Y superior.
Por conseguinte, o eixo Y é frequentemente construído com uma correia síncrona.
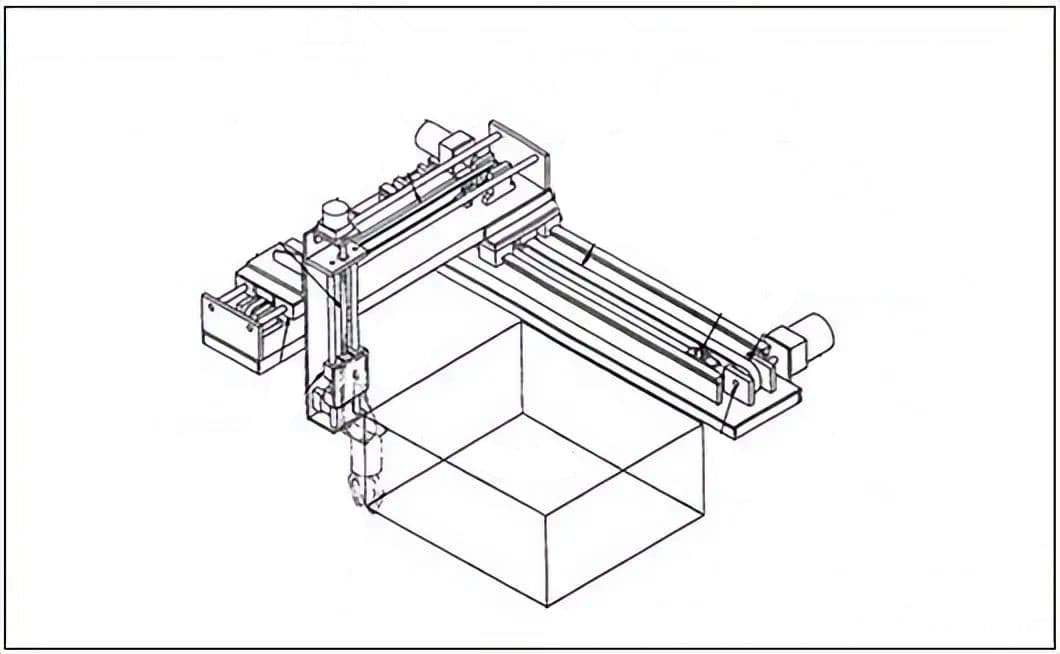
a) A [Figura 1] mostra um mecanismo típico de acionamento de 3 eixos X/Y/Z.
O eixo X é constituído por guias lineares, enquanto o eixo Y e o eixo Z são construídos com rolamentos lineares. O sistema de acionamento utiliza correias síncronas e fusos de esferas.
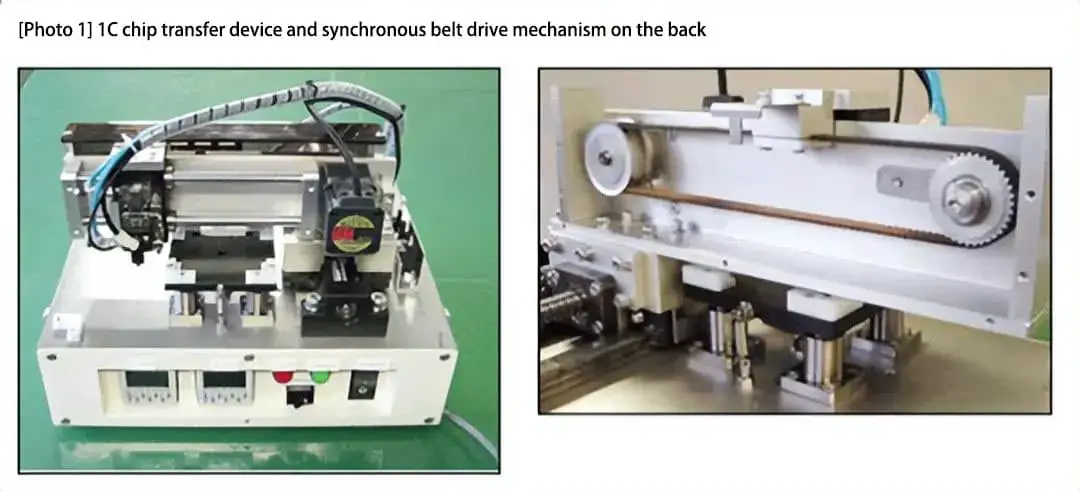
b) [Foto 1] mostra um exemplo de aplicação do eixo Y num dispositivo de montagem de chips IC. A direção do eixo Y é convertida em movimento alternativo por uma correia síncrona.
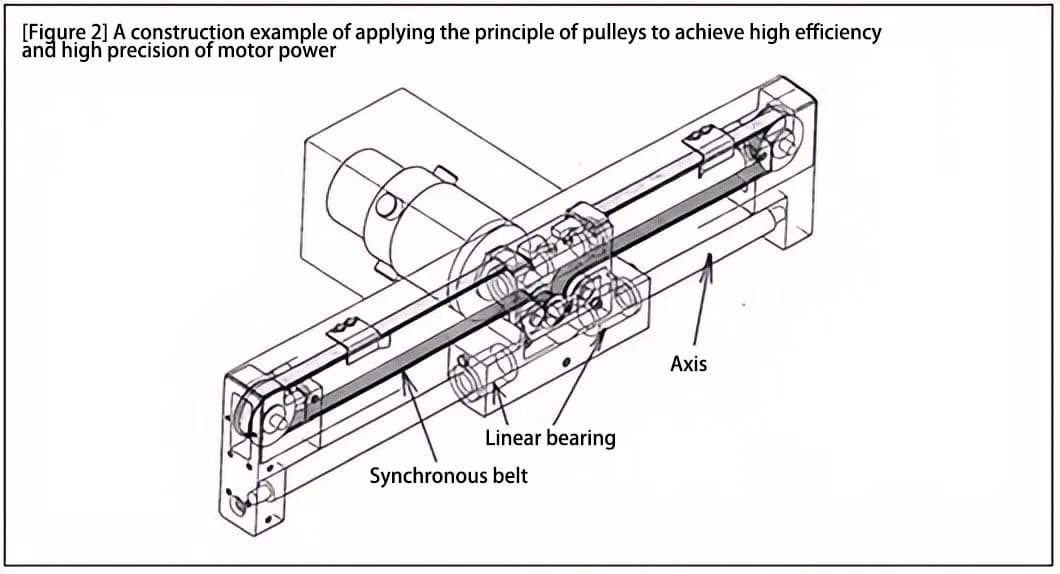
c) [A figura 2] apresenta um exemplo de aplicação de um robô de eixo único com as seguintes características
São utilizados dois rolamentos lineares com um grande vão para melhorar a capacidade de suporte e a precisão de orientação.
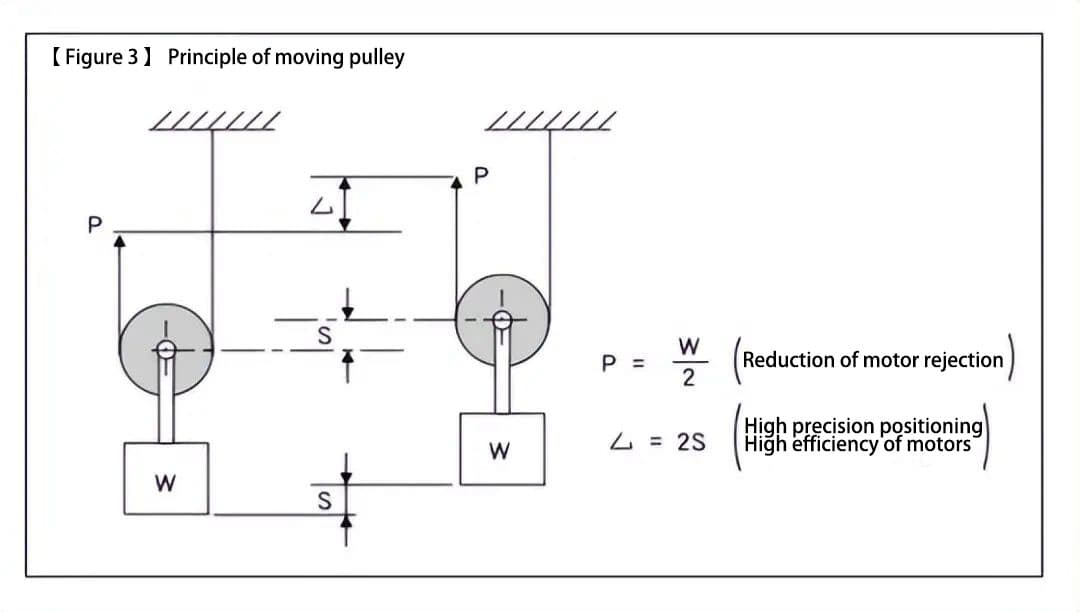
A conceção e a estrutura da correia síncrona e da polia utilizam um princípio de polia rolante ([Figura 3]) para obter uma elevada eficiência da potência do motor e um posicionamento de elevada precisão.
A correia síncrona e o eixo estão dispostos paralelamente para cima e para baixo, e mesmo com uma estrutura de eixo único, a rotação relativa entre o eixo e o rolamento linear pode ser restringida.
Princípio da polia móvel:
Para elevar o objeto de elevação da Figura 3 a uma distância S, é necessário deslocar o bloqueio do cabo para o dobro da altura, mas a força necessária é apenas metade do peso do objeto de elevação, o que permite elevar facilmente o objeto de elevação.
2 vezes a distância de deslocação
Precisão de posicionamento que pode melhorar a resolução mínima da rotação do motor Reduzir para metade o erro de recuo e de ralenti da polia Acionamento do motor a alta velocidade de rotação (2x), resultando numa elevada eficiência do motor
1/2 vezes a carga
Pode ser acionado por um motor de baixa potência (sem necessidade de redutores, etc.)
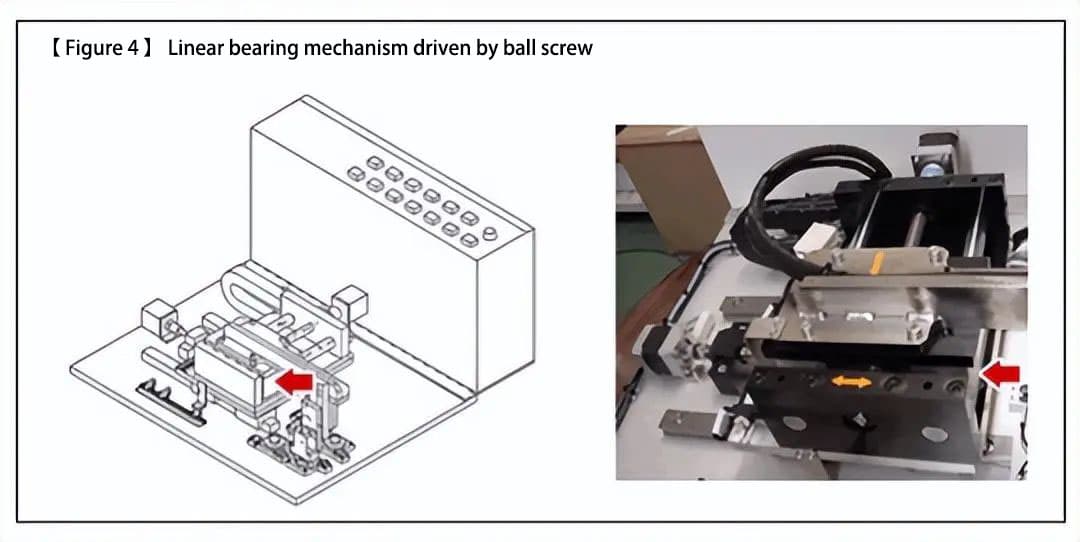
(2) Motor passo a passo e acionamento por fuso de esferas
O método de acionamento do fuso de esferas tem as seguintes características: [1] converte diretamente o movimento rotativo do motor em movimento linear, e [2] o passo do fuso de esferas tem a função de um redutor. A eficiência de transmissão da força motriz e a eficiência do motor são relativamente elevadas.
[A Figura 4] é um mecanismo de acionamento em que o eixo Y utiliza um rolamento linear e um fuso de esferas. Este mecanismo é normalmente aplicado a mecanismos que requerem alimentação unitária ou que têm requisitos de precisão de posicionamento.
Informações adicionais:
a) Características de um motor passo a passo
Os motores passo a passo têm a caraterística de produzir um binário elevado na gama de baixa velocidade (geralmente no arranque e na desaceleração), o que os torna adequados para movimentos de curta distância e controlo de posicionamento multiponto.
b) Precisão necessária do motor para atingir o objetivo de precisão de posicionamento
Precisão de posicionamento do objetivo = ±0,01 (mm). Ao selecionar um avanço do fuso de esferas de 10 (mm/rot), a precisão necessária (divisões) do motor passo a passo pode ser calculada utilizando a seguinte fórmula.
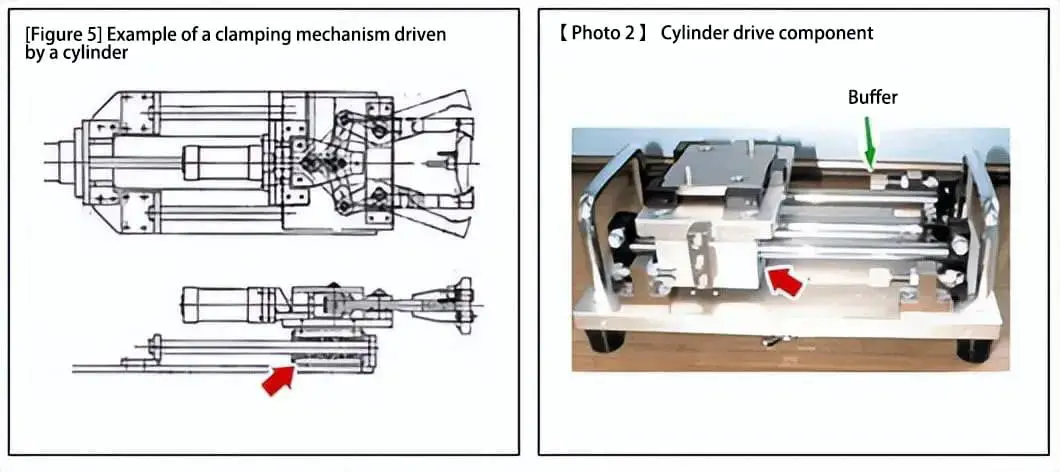
(3) Acionamento do cilindro
A [Figura 5] é um exemplo de um rolamento utilizado para o acionamento de um cilindro num mecanismo de pinça, enquanto a [Foto 2] é um exemplo de um mecanismo de acionamento de um cilindro que utiliza um acoplamento magnético. Ambos utilizam rolamentos lineares (indicados pelas setas) para orientação.
Não é possível controlar a velocidade de arranque e de paragem com um acionamento por cilindro, pelo que deve ser utilizado um amortecedor para reduzir o impacto na paragem (como se mostra na [Foto 2]).
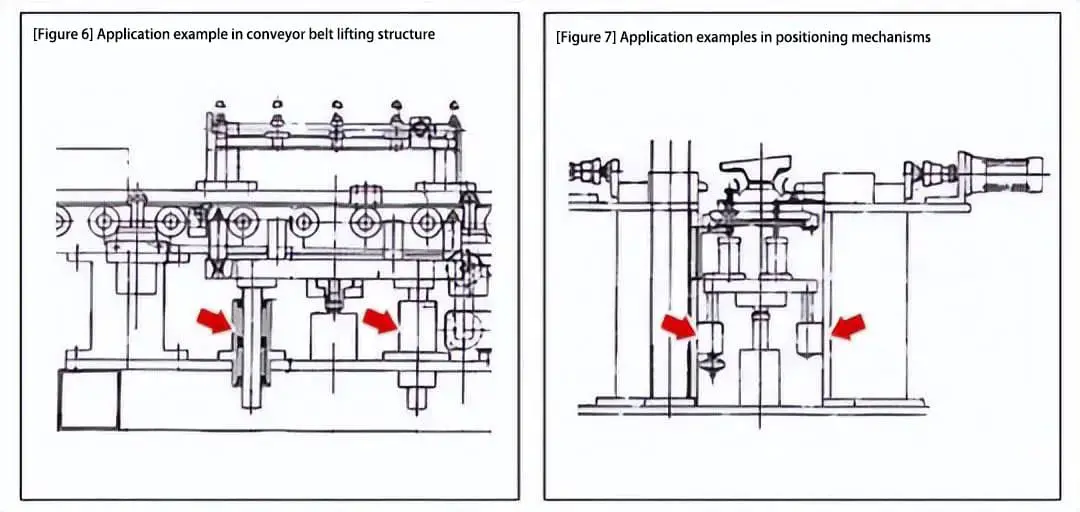
(4) Exemplos de orientação vertical
O guiamento vertical pode ser obtido através da utilização de rolamentos lineares com flanges. Não é necessária uma estrutura de suporte específica para garantir a instalação dos rolamentos lineares, o que permite um design estrutural simples e compacto (no caso de guias deslizantes, onde um substrato de montagem vertical deve ser configurado para o trilho de guia fixo).
Semelhante à estrutura da [Foto 4], a guia de elevação (mostrada na [Figura 6]) e o mecanismo de posicionamento (mostrado na [Figura 7]) para a parte inferior da correia transportadora também usam rolamentos lineares flangeados.
Como fundador da MachineMFG, dediquei mais de uma década da minha carreira à indústria metalúrgica. A minha vasta experiência permitiu-me tornar-me um especialista nos domínios do fabrico de chapas metálicas, maquinagem, engenharia mecânica e máquinas-ferramentas para metais. Estou constantemente a pensar, a ler e a escrever sobre estes assuntos, esforçando-me constantemente por me manter na vanguarda da minha área. Deixe que os meus conhecimentos e experiência sejam uma mais-valia para a sua empresa.
Imagine desbloquear a precisão das máquinas-ferramentas com uma simples superfície de vidro. As balanças de grelha linear fazem exatamente isso, transformando linhas finas em medições altamente precisas. Este artigo explora a forma como estas...
Já alguma vez se perguntou como é que as arestas afiadas das peças metálicas são suavizadas? Este processo, conhecido como chanfragem, transforma cantos perigosos e irregulares em superfícies mais seguras e angulares. Neste artigo, vai...
Já se interrogou sobre quais são as melhores marcas de rolamentos do mundo? Nesta publicação do blogue, vamos explorar os principais fabricantes de rolamentos conhecidos pela sua qualidade excecional, inovação e...
Já alguma vez se interrogou sobre quem alimenta o mundo nos bastidores? Nesta publicação do blogue, vamos dar um mergulho profundo nos principais fabricantes de geradores que mantêm as luzes acesas...
É um aspirante a engenheiro mecânico que procura destacar-se na sua área? Nesta publicação do blogue, vamos explorar os 10 principais softwares de design de engenharia mecânica que podem elevar o seu...
Já se interrogou sobre como é assegurada a integridade das porcas e parafusos soldados no seu automóvel? Este artigo revela o processo meticuloso de verificações e inspecções de qualidade que mantêm o seu veículo...
Já alguma vez se perguntou o que mantém um motor elétrico a funcionar sem problemas e sem sobreaquecer? Compreender as temperaturas de funcionamento seguras para os motores é crucial para a sua longevidade e desempenho. Neste artigo,...
Já alguma vez se interrogou sobre o fascinante mundo da fundição? Este processo de fabrico antigo, mas em constante evolução, molda o nosso quotidiano de inúmeras formas. Nesta publicação do blogue, vamos explorar o...
Já alguma vez se perguntou como é que as engrenagens do seu carro ou avião funcionam tão bem? Este artigo revela os principais fabricantes de engrenagens que estão a moldar o futuro da engenharia mecânica. Ficará a saber...