Motor de passo
Princípio de funcionamento do motor passo a passo
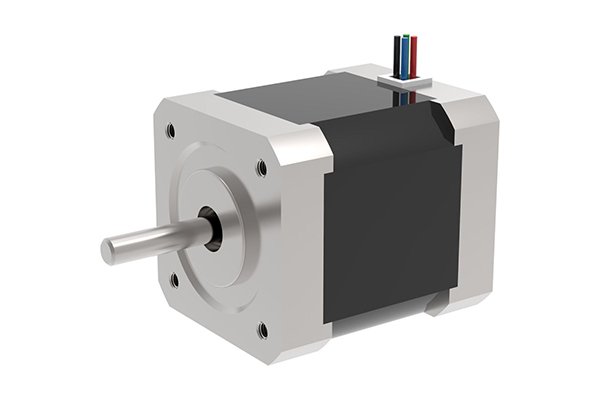
Um motor de passo, um tipo de motor especificamente concebido para controlo, converte impulsos eléctricos em deslocação angular.
Quando o driver de passo recebe um sinal de impulso, faz com que o motor de passo rode num ângulo fixo predeterminado, conhecido como "ângulo de passo", na direção especificada.
O motor roda passo a passo no ângulo de passo fixo.
O posicionamento preciso pode ser conseguido através do controlo do número de impulsos e a regulação da velocidade e da aceleração da rotação do motor pode ser conseguida através do controlo da frequência dos impulsos.
A inversão do sentido de rotação do motor pode ser conseguida alterando a sequência em que os enrolamentos são energizados.
Princípio de funcionamento do acionador de motor passo a passo
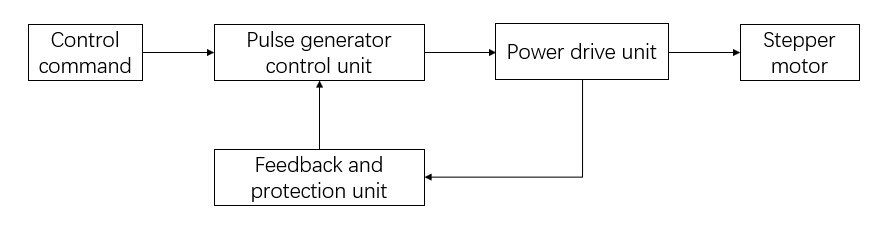
Um motor passo a passo requer um controlador de motor passo a passo especializado para funcionar. Este controlador é composto por uma unidade de controlo de impulsos, uma unidade de acionamento de potência e uma unidade de proteção.
A unidade de acionamento de potência amplifica os impulsos gerados pela unidade de controlo de impulsos e está diretamente ligada ao motor passo a passo, servindo de interface de potência entre o motor passo a passo e o microcontrolador.
A unidade de instruções de controlo recebe sinais de impulso e de direção e gera um conjunto de impulsos correspondentes, que são depois transmitidos ao motor passo a passo através da unidade de acionamento de potência.
O motor de passo roda então um ângulo de passo definido na direção indicada.
O motor passo a passo tem várias especificações técnicas importantes, como o binário estático máximo, frequência de arranquee frequência de funcionamento.
Em geral, quanto menor for o ângulo de passo, maior será o binário estático máximo e mais elevadas serão as frequências de arranque e de funcionamento.
Por conseguinte, o modo de funcionamento coloca uma forte ênfase na tecnologia de acionamento por subdivisão.
Este método melhora o binário e a resolução do motor passo a passo e elimina completamente a oscilação de baixa frequência.
Como resultado, o desempenho da unidade de subdivisão é superior ao de outros tipos de unidades.
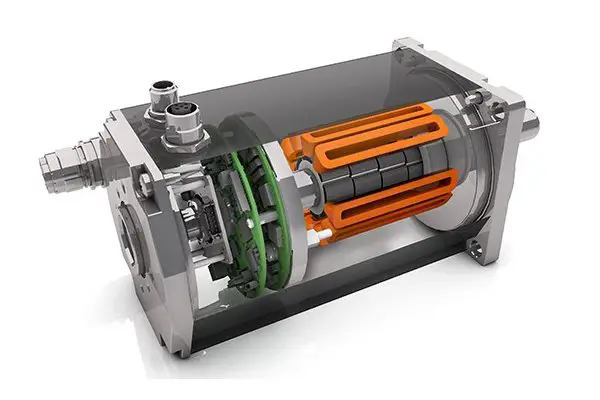
O rotor no interior de um servomotor é um íman permanente. O condutor controla a eletricidade trifásica U/V/W para criar um campo eletromagnético, fazendo com que o rotor rode sob a influência deste campo magnético. O próprio codificador do motor fornece sinais de feedback ao condutor, que ajusta o ângulo de rotação do rotor com base no valor de feedback e no valor alvo.
Servo motor
Princípio de funcionamento do servo motor
O servomotor, também designado por motor executivo, é utilizado como atuador em sistemas de controlo automático para converter os sinais eléctricos recebidos em deslocamento angular ou velocidade angular no veio do motor.
Os servo-motores existem em duas variedades: DC e AC.
Quando um servo motor recebe um impulso, roda o ângulo correspondente para produzir uma deslocação. Isto deve-se ao facto de o próprio servomotor emitir impulsos, sendo que cada ângulo de rotação emite um número correspondente de impulsos que formam um circuito fechado com os impulsos recebidos pelo servomotor.
Isto permite que o sistema monitorize o número de impulsos que envia ao servomotor e o número de impulsos que recebe, permitindo um controlo preciso e um posicionamento exato.
Em termos de desempenho, os servomotores CA são superiores aos servomotores CC. Os servomotores CA utilizam o controlo de onda sinusoidal, o que resulta numa baixa ondulação de binário e numa elevada capacidade.
Os servomotores de corrente contínua, por outro lado, utilizam o controlo de onda trapezoidal e têm um desempenho relativamente fraco.
No entanto, os servomotores sem escovas nos servomotores CC têm um melhor desempenho do que os servomotores com escovas.
Princípio de funcionamento do acionador do servomotor
O interior de um servo motor contém um rotor de íman permanente.
O atuador controla a eletricidade trifásica U/V/W para gerar um campo eletromagnético, provocando a rotação do rotor.
Para além disso, o codificador do motor fornece sinais de feedback ao condutor.
O condutor ajusta o ângulo de rotação do rotor com base no valor de feedback e no valor alvo desejado.
Acionamento do servomotor DC com escova:
O princípio de funcionamento do motor é semelhante ao de um motor CC normal.
O atuador tem uma estrutura de três circuitos, constituída por um circuito de corrente, um circuito de velocidade e um circuito de posição, dispostos por ordem de dentro para fora.
A saída do circuito de corrente controla a tensão de armadura do motor.
A entrada do loop de corrente é a saída PID do loop de velocidade, a entrada do loop de velocidade é a saída PID do loop de posição e a entrada do loop de posição é a entrada especificada.
O diagrama de controlo é ilustrado acima.
Servo motor DC sem escovas:
A fonte de alimentação é a corrente contínua, que é transformada em corrente alternada U/V/W por um inversor trifásico interno.
O condutor também utiliza uma estrutura de controlo de três circuitos (circuito de corrente, circuito de velocidade, circuito de posição) e o seu princípio de controlo de condução é o mesmo que o descrito anteriormente.
Acionamento de servomotores AC:
O sistema pode ser dividido em dois módulos separados: o painel de alimentação e o painel de controlo, cada um com funções distintas.
O painel de controlo emite sinais PWM através de um algoritmo correspondente, servindo de circuito de acionamento para o sinal de acionamento, para modificar a potência de saída do inversor e conseguir o controlo do servomotor CA síncrono de ímanes permanentes trifásico.
A unidade de acionamento converte primeiro a eletricidade trifásica de entrada ou a eletricidade municipal em eletricidade de corrente contínua através de um circuito retificador trifásico de ponte completa.
O servomotor trifásico síncrono de corrente alternada com ímanes permanentes é então acionado pelo comutador de um inversor trifásico sinusoidal do tipo PWM, após a retificação da eletricidade trifásica ou municipal.
Este processo é simplesmente uma conversão AC-DC-AC.
A unidade de controlo é o núcleo de todo o sistema servo AC e realiza o controlo da posição do sistema, o controlo da velocidade, o controlo do binário e o controlo da corrente.
Comparação do desempenho do servo motor e do motor passo-a-passo
Precisão do controlo
Quanto maior for o número de fases e de batimentos de um motor passo a passo, maior será a sua precisão.
O servomotor obtém feedback do seu próprio codificador, e quanto mais escalas o codificador tiver, maior será a sua precisão.
Característica de baixa frequência
Os motores passo a passo são propensos a vibrações de baixa frequência a baixas velocidades.
Para combater esta situação, o funcionamento a baixa velocidade recorre frequentemente à tecnologia de amortecimento ou de subdivisão.
Em contrapartida, os servomotores funcionam suavemente sem vibrações, mesmo a baixas velocidades.
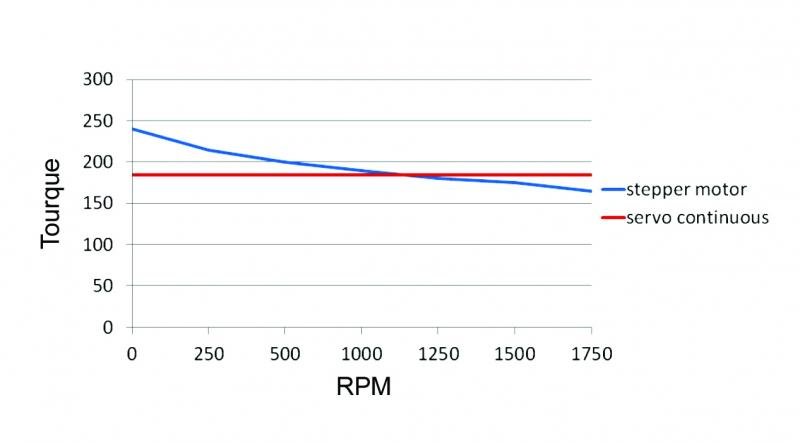
Característica de binário-frequência
O binário de saída de um motor passo a passo diminui com o aumento da velocidade e cai significativamente a velocidades elevadas.
Em contrapartida, um servomotor fornece um binário constante à sua velocidade nominal e uma potência constante à sua velocidade nominal.
Capacidade de sobrecarga
Um motor de passo não tem capacidade de sobrecarga, enquanto um servomotor tem uma forte capacidade de sobrecarga.
Desempenho operacional
Os motores passo a passo funcionam sob controlo de circuito aberto, o que os torna susceptíveis de perder o passo ou de parar a rotação se a frequência de arranque for demasiado elevada ou se a carga for demasiado pesada. Se a velocidade for demasiado elevada, pode também resultar em excesso de velocidade.
Por outro lado, o sistema de servo-acionamento AC utiliza o controlo em circuito fechado. O controlador do servomotor recolhe diretamente amostras do sinal de retorno do codificador do motor, formando circuitos internos de controlo da posição e da velocidade. Como resultado, é menos provável que os motores passo a passo percam o passo ou ultrapassem o limite, tornando o desempenho do controlo mais fiável.
Velocidade de resposta Desempenho
Os motores passo a passo demoram centenas de milissegundos a acelerar de um estado estático para a velocidade de funcionamento.
Em comparação, os sistemas servo AC têm um excelente desempenho de aceleração, normalmente demorando apenas alguns milissegundos, o que os torna adequados para aplicações que requerem arranques e paragens rápidas.