Obtendo o melhor projeto de mecanismo de acionamento de came: Pontos-chave a serem considerados
Como um simples sistema de came e seguidor pode levar a um movimento eficiente e preciso em máquinas complexas? Este artigo explora os meandros do projeto do mecanismo de acionamento de came, explicando os diferentes tipos de cames e seguidores, seus caminhos de movimento e como obter o desempenho ideal. Desde os componentes básicos até os métodos avançados de projeto, os leitores obterão informações valiosas sobre a criação de sistemas de came altamente eficientes. Espere aprender dicas práticas e análises detalhadas que melhorarão sua compreensão e aplicação de mecanismos de came em projetos de engenharia.
A composição e a classificação dos mecanismos de came
O mecanismo de came geralmente consiste em duas partes móveis, a saber, o came e o seguidor, ambos fixados à estrutura. O dispositivo de came é altamente versátil e pode gerar praticamente qualquer movimento arbitrário.
Um came pode ser definido como um componente com uma superfície curva ou ranhura. Ao balançá-lo ou girá-lo, outro componente, o seguidor, pode proporcionar um movimento predefinido. O caminho do seguidor é, na maioria das vezes, limitado a uma ranhura para obter movimento recíproco.
Embora às vezes dependam de seu próprio peso durante o curso de retorno, alguns mecanismos usam molas como força de retorno para obter movimentos precisos. Outros usam trilhos-guia para se mover ao longo de caminhos específicos.
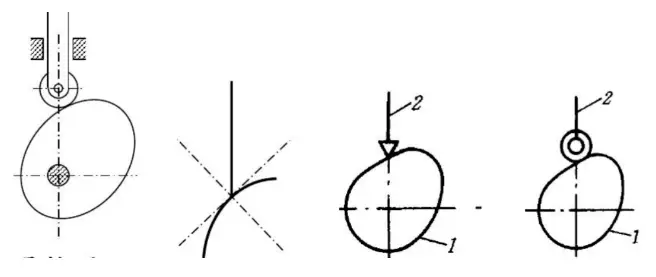
De acordo com o formato do came, ele pode ser dividido em três tipos: came de disco, came móvel e came cilíndrico.
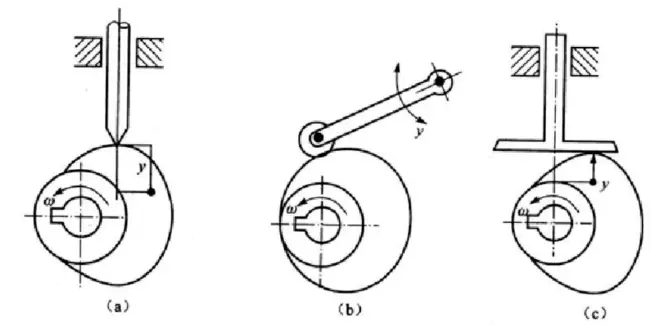
Os seguidores podem ser divididos de acordo com suas extremidades em três tipos: seguidores pontiagudos, seguidores em rolo e seguidores com fundo plano.
Tipos de mecanismos de came (a) Seguidor pontiagudo; (b) Seguidor de rolo: (c) Seguidor de fundo plano
Devido ao contato pontual entre o seguidor de ponta afiada e o came, que leva a alta tensão e desgaste rápido, ele não é adequado para mecanismos de came de baixa velocidade com grande impacto. O seguidor de rolete pode superar essas deficiências.
Para melhorar a eficiência da transmissão, também podemos introduzir um seguidor de fundo plano que seja perpendicular à direção da força na superfície inferior.
Os componentes de transmissão que consideramos anteriormente estão na forma de movimento em linha reta, mas também podem estar na forma de movimento oscilante. O primeiro é chamado de seguidor de ação direta, e o segundo é chamado de seguidor oscilante.
Também podemos fazer com que o centro de rotação do came não esteja no caminho linear do movimento do seguidor. Nesse momento, nós o chamamos de offset. Da mesma forma, se o centro de rotação estiver no caminho linear do movimento do seguidor, podemos chamá-lo de concêntrico.
Além disso, também podemos considerar métodos para manter relações de travamento de alta tensão e dividir o mecanismo em travamento geométrico e travamento por força.
Combinando o formato do came, a extremidade do seguidor e os padrões de movimento do seguidor, podemos determinar o nome do mecanismo projetado, como, por exemplo: o came de disco com um seguidor de ação direta de nariz afiado (posição relativa do came do seguidor + extremidade do seguidor + padrão de movimento do seguidor + formato do came).
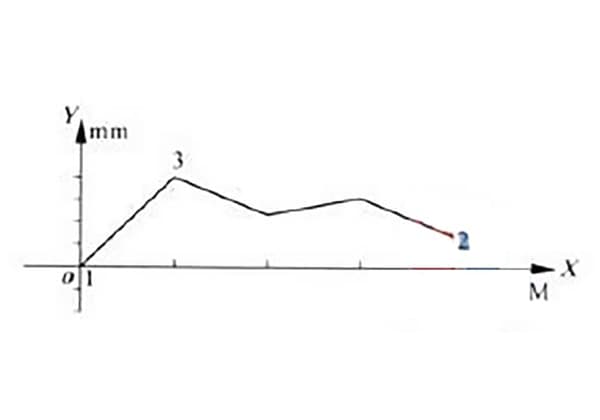
O processo de movimento dos mecanismos de came
Mecanismo de came
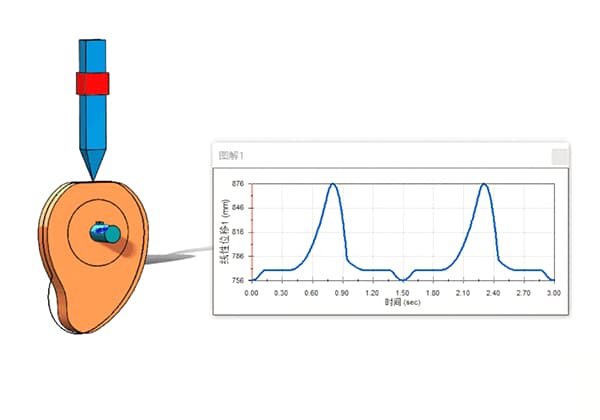
Primeiro, temos um came com um seguidor colocado nele. Quando o came gira a uma velocidade angular ω por φs graus, a placa de pressão não se move. Nesse momento, chamamos φs de ângulo de permanência, e o círculo correspondente a ele é chamado de círculo base. Da mesma forma, o raio desse círculo é chamado de raio do círculo base r0.
Em seguida, à medida que continuamos a girar o came a uma velocidade angular ω de φ graus, a placa de pressão sobe em h. Nesse momento, chamamos φ de ângulo de curso e h é chamado de curso.
Posteriormente, quando a placa de pressão atinge o ponto h, deixamos que ela permaneça por um período de tempo. Enquanto isso, o came gira em φs', o que corresponde ao ângulo de elevação.
Por fim, precisamos trazer a placa de pressão de volta à sua posição original, portanto, giramos o came em φ'. Nesse momento, a placa de pressão retorna ao ponto inicial. Chamamos φ' de ângulo de retorno.
Como projetar um mecanismo de came?
Há dois métodos principais para projetar mecanismos de came: um é o método gráfico e o outro é o método analítico.
O primeiro é relativamente simples, exigindo apenas o fornecimento do diagrama de movimento de impulso desejado e, em seguida, a obtenção da curva de contorno correspondente com base na relação ângulo-processo fornecida pelo diagrama.
A precisão não é muito alta. O último é calculado, e seu cálculo é relativamente complexo, o que é adequado para projetar mecanismos de came com requisitos de alta precisão.
Como fundador do MachineMFG, dediquei mais de uma década de minha carreira ao setor de metalurgia. Minha vasta experiência permitiu que eu me tornasse um especialista nas áreas de fabricação de chapas metálicas, usinagem, engenharia mecânica e máquinas-ferramentas para metais. Estou sempre pensando, lendo e escrevendo sobre esses assuntos, esforçando-me constantemente para permanecer na vanguarda do meu campo. Permita que meu conhecimento e experiência sejam um trunfo para sua empresa.
Você já se perguntou como configurar um servo driver para obter o máximo desempenho? Este guia aborda tudo o que você precisa saber sobre o ajuste dos parâmetros de ganho, desde o controle de posição até a regulagem de velocidade....
Como você pode evitar que seus moldes rachem durante o tratamento térmico? Este artigo se aprofunda no intrincado processo de tratamento térmico de moldes, descrevendo defeitos comuns como rachaduras por têmpera e...
Você já pensou na precisão necessária para apertar os parafusos do flange? A técnica adequada pode evitar vazamentos e garantir a segurança em sistemas de alta pressão. Este artigo aborda os métodos essenciais para...
Como você mede a retidão de um trilho-guia para garantir operações precisas da máquina? Este artigo explora dois métodos comuns: o método de conexão de ponto de duas extremidades e a condição mínima...
Como as máquinas de polimento conseguem aquele acabamento perfeito em superfícies metálicas? Neste artigo, exploramos a intrincada mecânica por trás dessas ferramentas essenciais. Desde os componentes envolvidos até o estágio duplo...
Este artigo mergulha no fascinante mundo da produção de fundição, revelando o processo passo a passo que transforma matérias-primas em componentes essenciais. Saiba mais sobre as técnicas, os materiais e os controles de qualidade envolvidos,...
Imagine produzir milhares de peças plásticas complexas todos os dias com precisão e velocidade exatas. A moldagem por injeção, uma técnica de fabricação transformadora, torna isso possível ao injetar material fundido em moldes para...
Imagine desbloquear a precisão das máquinas-ferramentas com uma simples superfície de vidro. As balanças de grade linear fazem exatamente isso, transformando linhas finas em medições altamente precisas. Este artigo explora como essas...
Você já se perguntou como as engrenagens de seu carro ou avião funcionam tão bem? Este artigo revela os principais fabricantes de engrenagens que estão moldando o futuro da engenharia mecânica. Você aprenderá...