A máquina de medição por coordenadas (CMM) é um instrumento de medição de precisão usado em vários setores. Ela é equipada com interruptores de freio a ar e dispositivos de micromovimento em seus três eixos, permitindo a transmissão precisa de cada eixo. Além disso, a CMM é equipada com um sistema de aquisição de dados de alto desempenho para garantir a precisão das medições.
A CMM é comumente usada para design de produtos, equipamentos de moldes, medições de engrenagens e lâminas, fabricação de máquinas, acessórios de ferramentas, peças de moldes a vapor, equipamentos eletrônicos e elétricos e outras medições de precisão.
1. Introdução ao instrumento
A máquina de medição de três coordenadas (CMM), também conhecida como instrumento de medição de três coordenadas, é um dispositivo de metrologia de precisão usado para medir dimensões geométricas, formas e relações espaciais em um sistema de coordenadas tridimensional. Ela opera utilizando uma sonda que pode se mover ao longo de três eixos ortogonais (X, Y e Z) com alta precisão.
O apalpador pode fazer contato físico com a peça de trabalho (apalpadores ou apalpadores de varredura) ou realizar medições sem contato (sistemas a laser ou de visão). O sistema de medição de deslocamento para cada eixo, normalmente empregando codificadores lineares de alta precisão ou balanças ópticas, alimenta os dados em um sofisticado sistema de computador. Esse sistema processa os pontos coletados (x, y, z) para calcular várias características geométricas, dimensões e características de forma da peça de trabalho.
As CMMs são capazes de medir vários aspectos da qualidade da peça, incluindo:
- Precisão dimensional: Medições lineares e angulares
- Precisão de posicionamento: relações espaciais entre recursos
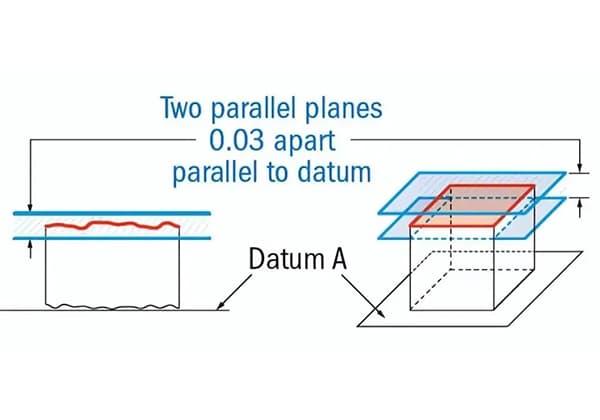
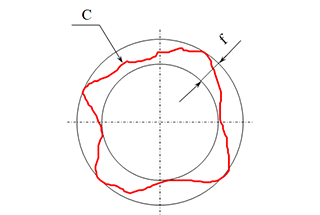
- Precisão geométrica: Tolerâncias de forma e orientação (planicidade, cilindricidade, etc.)
- Precisão do contorno: Perfis de superfície complexos e formas livres
Esse instrumento versátil é fundamental para garantir a precisão e a exatidão em vários setores, incluindo o automotivo, aeroespacial e de manufatura avançada.
Especificações do modelo:
Estrutura: Construção em granito de três eixos com um design de ponte móvel em estilo alemão, com gabinete de quatro lados para maior estabilidade.
Sistema de acionamento: Servomotores CC acoplados a rolamentos de ar de alta precisão pré-carregados para movimentos suaves e sem atrito.
Sistema de medição: Codificadores lineares abertos RENISHAW com uma resolução de 0,1 μm (100 nm).
Sistema de apalpador: Controlador e cabeçote de apalpador Renishaw, garantindo compatibilidade e capacidades de medição de alto desempenho.
Base: Placa de superfície de granito de alta precisão (Grau 00), proporcionando uma superfície de referência estável.
Requisitos ambientais:
- Temperatura: 20°C ± 2°C
- Umidade: 40% - 70% RH
- Gradiente de temperatura: ≤ 1°C/m
- Taxa de mudança de temperatura: ≤ 1°C/h
Requisitos pneumáticos:
- Pressão do ar: 0,4 MPa - 0,6 MPa
- Fluxo de ar: 25 L/min
Especificações de desempenho:
- Precisão da medição de comprimento (MPEE): ≤ (2,1 + L/350) μm, em que L é o comprimento medido em mm
- Erro de sondagem (MPEP): ≤ 2,1 μm
Principais recursos:
A máquina utiliza trilhos-guia de granito natural para todos os três eixos, garantindo estabilidade termodinâmica superior em toda a estrutura. Essa escolha de projeto elimina os erros de precisão que poderiam surgir da expansão térmica diferencial entre os materiais, como pode ocorrer em máquinas que usam materiais mistos para eixos diferentes. As características térmicas uniformes do granito contribuem para um desempenho consistente em diferentes condições ambientais e durações de medição.
Comparação entre o granito e a liga de alumínio para aviação
Os materiais de liga de alumínio apresentam um coeficiente de expansão térmica significativamente maior em comparação com o granito. Essa propriedade inerente pode levar à instabilidade dimensional em equipamentos de precisão.
Nas máquinas de medição por coordenadas (CMMs), os componentes, como vigas e estruturas do eixo Z, fabricados com ligas de alumínio de grau aeronáutico, são suscetíveis a alterações dimensionais e desvios de precisão ao longo do tempo, principalmente com o uso prolongado e a ciclagem térmica.
Por outro lado, as CMMs de ponta geralmente utilizam granito para componentes estruturais críticos. A plataforma do sistema de três coordenadas e o eixo principal são normalmente construídos com blocos de granito retificados com precisão. Essa escolha de material proporciona estabilidade térmica superior e características de amortecimento de vibração.
O eixo principal é fabricado em granito, enquanto o feixe e o eixo z podem incorporar um projeto híbrido usando ligas de alumínio e outros materiais para otimizar o peso e a rigidez. No entanto, essa combinação de materiais com coeficientes de expansão térmica diferentes pode introduzir erros de medição e problemas de estabilidade quando submetidos a flutuações de temperatura.
Para atenuar esses desafios, as CMMs avançadas empregam uma estrutura retangular totalmente em granito para o sistema de guia de três eixos. Esse projeto é complementado por rolamentos de ar protendido de alta precisão e autolimpantes. A estrutura monolítica de granito garante estabilidade dimensional e precisão de medição a longo prazo.
Os rolamentos de ar proporcionam uma distribuição de força estável e equilibrada ao longo da direção axial, reduzindo significativamente o desgaste e contribuindo para a longevidade dos componentes críticos da máquina. Esse projeto também minimiza o atrito e os efeitos de deslizamento, aumentando a repetibilidade da medição.
Foi implementada uma tecnologia patenteada de saída de ar por pequenos orifícios, com uma taxa de consumo de ar otimizada de 30 L/min. Essa inovação cria um efeito de condensação localizado dentro da folga do rolamento, neutralizando efetivamente o calor gerado pelo atrito residual do movimento do rolamento e melhorando a estabilidade térmica geral do equipamento.
O princípio físico subjacente aproveita o comportamento do gás que passa por um orifício circular sob pressão. Embora a sabedoria convencional sugira que esse processo gera calor por atrito, o que pode ser prejudicial para medições de alta precisão, o design de orifício pequeno induz a um fenômeno único. Quando o diâmetro do orifício de saída é reduzido abaixo de um limite crítico, ocorre um efeito de condensação na vizinhança imediata do orifício. Esse resfriamento localizado compensa efetivamente o calor mínimo gerado pelo atrito com o ar durante as operações de medição.
Ao aproveitar esse princípio físico por meio da implementação da tecnologia de saída de gás de pequeno orifício, a CMM pode manter uma estabilidade de temperatura excepcional por longos períodos. Essa estratégia de gerenciamento térmico é fundamental para garantir a precisão e a confiabilidade consistentes da medição em aplicações de metrologia de precisão.
Comparação de rolamentos de MMCs dos principais fornecedores
Os três eixos incorporam as escalas ópticas banhadas a ouro premium da Renishaw, oferecendo uma resolução excepcional de 0,1μm (micrômetros). Este sistema de codificação linear de alta precisão assegura um feedback exato da posição e capacidades de medição.
O projeto de montagem da balança emprega uma configuração livre de fixação, com uma extremidade firmemente ancorada e a outra podendo flutuar. Esse arranjo compensa efetivamente a expansão e a contração térmicas, minimizando os erros de medição devido às flutuações de temperatura do ambiente.
O sistema de movimento utiliza um design cinemático de última geração que desacopla as forças de acionamento das superfícies do rolamento. Essa abordagem avançada elimina as tensões induzidas nas guias, maximizando a precisão da medição e a estabilidade mecânica de longo prazo.
Para o acionamento do eixo, é empregado um sistema de transmissão por correia síncrona reforçada com aço. Esse projeto oferece características superiores de amortecimento de vibração durante travessias rápidas, ao mesmo tempo em que proporciona alta resistência à tração, excelente velocidade de posicionamento e vida útil operacional prolongada.
A CMM opera com o software Rational-DMIS, um pacote de metrologia líder do setor, certificado pelo Physikalisch-Technische Bundesanstalt (PTB). Essa plataforma de software potente e intuitiva permite que os usuários se concentrem nas tarefas de medição em vez de na programação complexa, simplificando o processo de inspeção.
2. Componentes básicos do CMM
X-beam:
Incorpora uma avançada tecnologia de feixe inclinado de precisão, aprimorando a rigidez estrutural e minimizando a deformação térmica para melhorar a precisão da medição.
Trilho guia na direção Y:
Apresenta uma estrutura de posicionamento exclusiva com ranhuras de cauda de andorinha inferiores integradas, usinadas diretamente na bancada de trabalho, garantindo um alinhamento superior e reduzindo os erros de montagem.
Sistema de trilhos-guia:
Utiliza rolamentos de ar de alta precisão, autolimpantes e pré-carregados, compreendendo trilhos-guia flutuantes de ar com pressão estática em quatro direções. Esse projeto minimiza o atrito, melhora a suavidade do movimento e mantém a precisão consistente ao longo do tempo.
Sistema de acionamento:
Implementa servomotores CC de alto desempenho acoplados a mecanismos flexíveis de acionamento por correia dentada síncrona. Cada eixo é controlado eletronicamente e limitado mecanicamente, resultando em transmissão rápida, melhor desempenho de movimento e maior precisão de posicionamento.
Eixo Z:
Integra um dispositivo de balanceamento pneumático ajustável, melhorando significativamente a precisão do posicionamento e a repetibilidade das medições do eixo z. Esse recurso compensa as variações de peso da sonda e garante uma força de contato consistente.
Sistema de controle:
Emprega um avançado sistema de controle especializado de três coordenadas com dois computadores importados, permitindo o processamento paralelo e a redundância para melhorar a confiabilidade e o desempenho.
Sistema de máquina:
Incorpora a tecnologia de correção de erros 3D auxiliada por computador (CAA), garantindo estabilidade de longo prazo e alta precisão do sistema. Essa tecnologia adaptativa compensa os erros geométricos e as variações térmicas em tempo real.
Software de medição:
Utiliza o abrangente pacote de software de medição 3D-DMIS, que oferece um espectro completo de funções de medição, recursos avançados de análise de dados e integração on-line perfeita com sistemas CAD/CAM para processos de inspeção eficientes.
3. Princípio funcional da CMM
Uma máquina de medição por coordenadas (CMM) é um instrumento de metrologia de precisão projetado para medir as características geométricas de objetos com alta precisão. Ela consiste em três componentes principais: um mecanismo de guia, elementos de medição de comprimento e dispositivos de exibição digital, todos alinhados ao longo de três eixos perpendiculares entre si (X, Y e Z). O sistema também inclui uma mesa de trabalho para apoiar o objeto medido, embora o tamanho dessa mesa possa variar de acordo com as aplicações pretendidas da CMM.
O cabeçote de medição, geralmente equipado com um apalpador ou sensor óptico, pode ser movido para pontos de medição específicos manualmente ou por meio de motorização controlada por computador. Quando o apalpador entra em contato com a peça de trabalho (ou captura dados opticamente), ele gera um sinal de disparo. Simultaneamente, codificadores lineares de alta precisão (normalmente escalas ópticas ou escalas de vidro) ao longo de cada eixo medem a posição exata da ponta da sonda no espaço 3D.
A principal funcionalidade de uma CMM está em sua capacidade de determinar e exibir com precisão as coordenadas espaciais de qualquer ponto em seu volume de medição. Isso é obtido por meio de uma sofisticada integração de precisão mecânica, tecnologia de sensores e processamento de dados:
- Interação da sonda: Quando a sonda entra em contato com a peça de trabalho (ou captura dados opticamente), ela envia um sinal de ponto de amostragem para o sistema de controle da CMM.
- Leitura da posição: O sistema de controle registra instantaneamente a posição atual da ponta de prova em relação à origem da máquina (ponto 0,0,0), lendo os valores dos codificadores lineares em cada eixo.
- Processamento de dados: O sistema de computador da CMM processa esses valores de coordenadas brutas, aplicando várias compensações (por exemplo, compensações de calibração da sonda, compensação de temperatura) para garantir a precisão.
- Exibição e análise: Os dados de coordenadas processados são exibidos na interface da CMM e podem ser usados para várias finalidades analíticas, como medições dimensionais, tolerância geométrica ou comparação com modelos CAD.
As CMMs modernas geralmente incorporam recursos avançados além desse princípio básico, incluindo:
- Sistemas de compensação de temperatura para levar em conta a expansão térmica da máquina e da peça de trabalho
- Rolamentos de ar para um movimento suave e de baixo atrito do cabeçote de medição
- Sistemas automatizados de troca de sonda para flexibilidade nas tarefas de medição
- Software avançado para análise de geometria complexa, avaliação de GD&T e comparação de CAD
Embora isso descreva a operação fundamental de uma CMM, é importante observar que a tecnologia continua a evoluir, com desenvolvimentos em áreas como medição sem contato, sistemas multissensor e integração com os conceitos da Indústria 4.0, expandindo ainda mais os recursos e as aplicações dessas ferramentas cruciais de metrologia.
4. Classificação da CMM
De acordo com a estrutura do CMM, ele pode ser dividido nas seguintes categorias:
1. Tipo de ponte móvel
A máquina de medição por coordenadas (CMM) mais comumente usada é a do tipo ponte móvel.
O eixo, o eixo principal que se move na direção vertical, é guiado por uma estrutura em forma de caixa para se mover ao longo da viga horizontal.
A viga horizontal, que é perpendicular ao eixo, é apoiada em ambas as extremidades por duas colunas, formando uma "ponte". A ponte se move ao longo de duas ranhuras de guia que são perpendiculares ao eixo no plano horizontal.
Devido ao suporte fornecido pelos suportes em ambas as extremidades da viga, o tipo de ponte móvel tem uma deflexão mínima menor e maior precisão em comparação com o tipo cantilever.
2. Tipo de cama de ponte
No tipo de leito de ponte, o eixo principal se move na direção vertical e é guiado por uma estrutura em forma de caixa para se mover ao longo da viga do eixo vertical. A viga se move ao longo de dois trilhos de guia horizontais na direção axial, localizados na superfície superior dos pilares fixados no corpo da máquina.
Esse tipo é semelhante ao tipo de ponte móvel, pois ambas as extremidades da viga são apoiadas, resultando em uma deflexão mínima da viga e maior precisão em comparação com o tipo cantilever.
Além disso, somente a viga se move na direção axial, o que reduz a inércia geral e facilita a operação manual em comparação com o tipo de ponte móvel.
3. Tipo de pórtico
O tipo de pórtico de ponte, também conhecido como tipo de porta ou montado no piso, é diferente do tipo de cama de ponte, pois é fixado diretamente no piso.
Esse tipo de estrutura oferece maior rigidez e estabilidade em comparação com a ponte do tipo leito e é comumente usado em instrumentos de medição de três coordenadas maiores.
Cada eixo é acionado por um motor, proporcionando uma ampla faixa de medição. O operador também pode trabalhar dentro da estrutura da ponte.
4. Tipo de ponte fixa
O tipo de ponte fixa apresenta um eixo principal que se move na direção vertical e é guiado por uma estrutura em forma de caixa para se mover ao longo da viga horizontal do eixo vertical.
A ponte, ou pilar, é fixada no corpo da máquina, enquanto a mesa de medição se move ao longo do trilho-guia do plano horizontal, que é perpendicular ao eixo, na direção axial.
Cada eixo é acionado por um motor para manter a precisão da posição. Entretanto, esse modelo não foi projetado para operação manual.
5. Tipo de ponte em L
A ponte em forma de L foi projetada para reduzir a inércia da ponte à medida que o eixo se move.
Em comparação com o tipo de ponte móvel, esse projeto tem menos inércia em seus componentes móveis, o que facilita a operação. No entanto, ele tem um nível menor de rigidez.
6. Mesa fixa tipo braço cantilever
O tipo cantilever móvel apresenta um eixo principal que se move na direção vertical e é guiado por uma estrutura em forma de caixa para se mover ao longo da viga cantilever horizontal do eixo vertical na direção axial. A viga cantilever se move ao longo de uma ranhura de guia no plano horizontal, que é perpendicular ao eixo.
Esse tipo de estrutura é aberto em três lados e é conveniente para a montagem e desmontagem de peças de trabalho, pois elas podem se estender além da mesa. No entanto, a precisão é menor devido ao design do cantilever.
7. Tipo móvel de coluna única
O tipo móvel de pilar único apresenta um eixo principal que se move na direção vertical, e o pilar inteiro se move ao longo da ranhura de guia do plano horizontal, que é perpendicular ao eixo, conectado ao eixo.
A mesa de medição se move na direção axial ao longo da ranhura de guia do plano horizontal, que é perpendicular ao eixo.
Esse tipo de estrutura apresenta boa rigidez tanto na mesa de medição quanto no pilar, o que leva a uma deformação mínima. Além disso, a escala linear de cada eixo é posicionada próxima ao eixo de medição, garantindo a conformidade com o teorema de Abbe.
8. Tipo de tabela xy de coluna única
A mesa de medição de pilar único é do tipo móvel, com um eixo principal que se move na direção vertical.
O pilar é equipado com uma ranhura de guia do eixo e é fixado ao corpo do instrumento de medição.
Durante a medição, a mesa de medição se move ao longo do eixo na direção do plano horizontal.
9. Mesa móvel tipo braço horizontal
A mesa de medição de braço horizontal é do tipo móvel, com uma estrutura de caixa que suporta o braço horizontal para se mover na direção vertical (eixo) ao longo do pilar vertical. A sonda é presa ao cantilever na direção horizontal.
O pilar se move na direção axial ao longo da ranhura da guia no plano horizontal, que é perpendicular ao eixo. A mesa de medição também se move na direção axial ao longo da ranhura da guia no plano horizontal, que é perpendicular ao eixo e ao eixo.
Esse projeto é um aprimoramento do tipo cantilever horizontal, pois elimina a deflexão causada pela extensão ou retração do braço horizontal na direção axial.
10. Mesa fixa do tipo braço horizontal
A plataforma de medição de braço horizontal é do tipo fixo e tem uma estrutura semelhante à do tipo móvel.
A mesa de medição é fixa e os eixos X, Y e Z se movem ao longo da ranhura da guia. Durante a medição, o pilar se move na ranhura de guia do eixo, enquanto a mesa deslizante presa ao eixo se move na direção do eixo vertical.
11. Braço horizontal do tipo móvel
O tipo de movimento de braço horizontal apresenta um eixo cantilever que se move na direção horizontal e uma estrutura de caixa que suporta o braço horizontal e se move ao longo da coluna na direção axial. A coluna é perpendicular ao eixo.
O pilar se move na direção axial ao longo da ranhura de guia do plano horizontal, que é perpendicular ao eixo, tornando-o inadequado para medições de alta precisão, a menos que o braço horizontal seja estendido ou retraído para compensar os erros causados pelo peso.
Esse tipo de estrutura é usado principalmente para inspeção de veículos.
12. Tipo de ponte em anel
O tipo de ponte de circuito fechado é conhecido por sua estabilidade, pois o mecanismo de acionamento está localizado no centro da bancada de trabalho. Esse design ajuda a reduzir o impacto causado pelo movimento da ponte, tornando-a a mais estável entre todos os instrumentos de medição de três coordenadas.
5. Principais vantagens
- Liga de alumínio de aviação com superfície anodizada;
- Rolamento de ar autolimpante de alta precisão;
- Régua de grade de alta precisão importada da Europa;
- Tecnologia patenteada de feixe triangular de precisão.
6. Campos de aplicativos
O tipo de ponte de loop fechado é amplamente utilizado em diversos setores, incluindo automóveis, eletrônicos, maquinário, aviação e militar, para a medição de vários objetos, como caixas, quadros, engrenagens, cames, rodas sem-fim, sem-fins, lâminas, curvas, superfícies curvas, ferragens, plásticos e muito mais. Ele também é comumente usado no setor de moldes.
7. Método de uso
As máquinas de medição de três coordenadas (CMMs) são normalmente classificadas em três categorias: medição com contato, medição sem contato e medição combinada com contato e sem contato.
A medição por contato é um método comumente usado para medir produtos usinados, produtos prensados e filmes metálicos. A digitalização de pontos de dados na superfície do objeto medido com uma CMM é frequentemente necessária para analisar dados de processamento ou para fins de engenharia reversa.
Usando a CMM Foundation-Pro como exemplo, este artigo descreverá os diferentes métodos comuns de escaneamento e as etapas de operação das CMMs.
A operação de digitalização de uma CMM envolve a coleta de pontos de dados em uma área específica da superfície do objeto que está sendo medido usando o programa DMIS do PC. Essa área pode ser uma linha, um remendo, uma seção da peça, uma curva da peça ou uma circunferência a uma determinada distância da borda.
O tipo de varredura depende do modo de medição, do tipo de sonda e da disponibilidade de arquivos CAD. A opção "digitalização" na tela de controle é determinada pelo botão de status (manual/DCC).
Se o método DCC for usado para medição e os arquivos CAD estiverem disponíveis, os métodos de escaneamento disponíveis são escaneamento de "linha aberta", "linha fechada", "patch", "seção" e "perímetro". Se apenas os arquivos CAD de wireframe estiverem disponíveis, os métodos de escaneamento disponíveis serão "linha aberta", "linha fechada" e "patch".
Se o modo de medição manual for usado, somente o modo básico de "varredura manual de TTP" estará disponível. Se a medição manual for usada com uma sonda rígida, as opções disponíveis são delta fixo, delta variável, delta de tempo e varredura do eixo do corpo.
Este artigo fornecerá uma explicação detalhada dos cinco modos de varredura que podem ser selecionados quando o menu "utilitário" é acessado e a opção "varredura" é selecionada no status DCC.
1. varredura linear aberta
A varredura de linha aberta é o modo de varredura mais simples. A sonda começa no ponto inicial, faz a varredura ao longo de uma direção especificada com um tamanho de passo predeterminado e termina no ponto final.
A digitalização de linha aberta pode ser dividida em dois casos com base na disponibilidade de um modelo CAD.
(1) Sem modelo CAD:
Se a peça de trabalho medida não tiver um modelo CAD, primeiro insira os valores nominais dos pontos de limite. Abra a opção "boundary point" (ponto de limite) na caixa de diálogo e clique em "1" para inserir os dados do ponto inicial. Em seguida, clique duas vezes em "d" para inserir os novos valores de coordenadas X, Y e Z do ponto de direção (o ponto de coordenadas que indica a direção da varredura). Por fim, clique duas vezes em "2" para inserir os dados do ponto final.
Em seguida, insira o tamanho do passo. Insira um novo valor de comprimento de passo na coluna "Max Inc" na coluna "Direction 1 Tech" na caixa de diálogo de digitalização. Por fim, verifique se o vetor de direção definido está correto, o que define o vetor normal da superfície do primeiro ponto de medição após o início da digitalização, a seção transversal e o vetor normal da superfície do último ponto antes do fim da digitalização. Clique em "create" (criar) depois que todos os dados tiverem sido inseridos.
(2) Com modelo CAD:
Se a peça de trabalho medida tiver um modelo CAD, clique na superfície correspondente do modelo CAD com o botão esquerdo do mouse no início da digitalização, e o programa PC DMIS gerará um ponto no modelo CAD e o marcará como "1", o ponto inicial. Em seguida, clique no próximo ponto para definir a direção da varredura. Por fim, clique no ponto final (ou ponto de limite) e marque-o como "2". Conecte a linha entre "1" e "2".
Para cada ponto selecionado, o programa PC DMIS digitará o valor da coordenada e o vetor correspondentes na caixa de diálogo. Depois de determinar o tamanho do passo e outras opções (como plano de segurança, ponto único etc.), clique em "measure" (medir) e depois em "create" (criar).
2. Varredura linear fechada
O modo de varredura de linha fechada permite a varredura da superfície interna ou externa de uma peça de trabalho. Ele requer apenas dois valores, o "ponto inicial" e o "ponto de direção" (o PC DMIS considera o ponto inicial como o ponto final).
(1) Operação de entrada de dados:
Clique duas vezes no ponto de limite "1" para inserir sua posição na caixa de diálogo de edição. Clique duas vezes no ponto de direção "d" para inserir seu valor de coordenada. Selecione o tipo de varredura ("linear" ou "variável"), insira o tamanho do passo e defina o tipo de toque ("vetor", "superfície" ou "borda").
Clique duas vezes no "vetor inicial" e insira o vetor no ponto "1". Verifique o vetor de seção. Depois de inserir outras opções, clique em "create" (criar).
Também é possível tocar o primeiro ponto de medição na superfície da peça de trabalho usando o painel de controle da máquina de medição por coordenadas e, em seguida, tocar o ponto de direção. O programa DMIS para PC inserirá automaticamente o valor medido na caixa de diálogo e calculará o vetor inicial.
Depois de selecionar o modo de controle de digitalização, o tipo de ponto de medição e outras opções, clique em "create" (criar).
(2) Varredura de linha fechada com modelo CAD:
Se a peça de trabalho medida tiver um modelo CAD, confirme a "varredura de linha fechada" antes da medição. Primeiro, clique no ponto inicial da superfície para gerar o símbolo "1" no modelo CAD (ao clicar, a superfície e os pontos de limite são destacados para ajudar a selecionar a superfície correta). Em seguida, clique no ponto de direção da digitalização.
O PC DMIS fornecerá as coordenadas e os vetores correspondentes dos pontos selecionados na caixa de diálogo. Depois de selecionar o método de controle de digitalização, o tamanho da etapa e outras opções, clique em "create" (criar).
3. Verificação de patches
O modo Patch Scanning permite que você escaneie uma área, em vez de apenas uma única linha de escaneamento.
Esse método de escaneamento requer pelo menos quatro informações de ponto de limite, incluindo o ponto inicial, o ponto de direção, o comprimento do escaneamento e a largura do escaneamento.
O PC DMIS pode calcular a área triangular com base nos pontos de limite 1, 2 e 3, que são definidos pelas informações básicas ou padrão. A direção da varredura é determinada pelo valor da coordenada do ponto D.
Se você adicionar um quarto ou quinto ponto de limite, o patch poderá ter a forma quadrada ou pentagonal.
Ao usar o Patch Scanning Method, certifique-se de selecionar "Closed Line Scanning" na caixa de seleção para digitalizar elementos fechados, como cilindros, cones, ranhuras, etc. Em seguida, insira o ponto inicial, o ponto final e o ponto de direção.
A posição do ponto final representa a distância para cima ou para baixo movida durante a varredura do elemento medido.
O vetor do plano de seção pode ser definido pelo ponto inicial, ponto de direção e vetor inicial (que normalmente é paralelo ao elemento medido).
São apresentados três métodos para definir a varredura de patches, usando a criação de patches quadrilaterais como exemplo:
(1) Entrada de valor de coordenadas:
- Clique duas vezes no ponto de limite "1" e insira os valores das coordenadas X, Y e Z do ponto inicial.
- Clique duas vezes no ponto de direção do limite "d" e insira o valor da coordenada do ponto de direção da varredura.
- Clique duas vezes no ponto de limite "2" e insira a largura da varredura para definir a primeira direção.
- Clique duas vezes no ponto de limite "3" e insira a largura da varredura para definir a segunda direção.
- Clique em "3" e pressione o botão "Add" (Adicionar) para exibir o quarto ponto de limite na caixa de diálogo.
- Clique duas vezes no ponto de limite "4" e digite o valor da coordenada do ponto final.
- Depois de definir o tamanho da etapa e o tamanho máximo da etapa necessários para a digitalização, clique em "Create" (Criar).
(2) Modo de teste de toque:
- Selecione o modo "Patch Scanning" e toque o primeiro ponto no ponto inicial desejado usando o apalpador da máquina de medição por coordenadas.
- O valor da coordenada desse ponto será exibido no item "#1" da caixa de diálogo "Boundary Point" (Ponto de limite).
- Toque no segundo ponto, que representa o ponto final da primeira direção de varredura, e seu valor de coordenada será exibido no item "d" da caixa de diálogo.
- Toque no terceiro ponto, que representa a largura da amostra digitalizada, e seu valor de coordenada será exibido no item "#3" da caixa de diálogo.
- Clique em "3" e selecione "Add" para adicionar o quarto ponto à lista.
- Toque no ponto final e a caixa de diálogo será fechada.
- Por fim, defina o espaçamento da linha de varredura e o comprimento da etapa em ambas as direções.
- Depois de selecionar o tipo de toque de digitalização e as opções necessárias, clique em "Create" (Criar).
(3) Modo de modelo de superfície CAD:
- Esse método de escaneamento só é aplicável a peças de trabalho com um modelo de superfície CAD.
- Selecione o modo "Patch Scanning" e clique com o botão esquerdo do mouse na superfície de trabalho do CAD.
- Destaque "1" na caixa de diálogo "Boundary Point" e clique com o botão esquerdo do mouse no ponto inicial da digitalização na superfície.
- Destaque "d" e clique na superfície para definir o ponto de direção.
- Clique na superfície para definir a largura da varredura (#2).
- Clique na superfície para definir a largura da varredura (#3).
- Clique em "3", selecione "Add" (Adicionar), adicione o ponto adicional "4", destaque "4", clique para definir o ponto final da varredura e feche a caixa de diálogo.
- Depois de definir as etapas em ambas as direções e selecionar as opções necessárias, clique em "Create" (Criar).
4. Verificação de seção
O modo Section Scanning só é aplicável a peças com um modelo de superfície CAD.
Ele permite a digitalização de uma seção específica da peça de trabalho.
A seção digitalizada pode estar ao longo da direção do eixo X, Y ou Z ou em um ângulo específico com o eixo de coordenadas.
Várias varreduras de seção podem ser realizadas definindo o tamanho da etapa.
É possível definir o ponto de limite da varredura de seção na caixa de diálogo.
Ao pressionar o botão de conversão "Cut CAD" (Cortar CAD), você pode localizar qualquer orifício no modelo de superfície CAD e definir sua linha de limite da mesma forma que a digitalização de linha aberta.
O programa DMIS para PC ajustará automaticamente o caminho de escaneamento para evitar buracos no modelo de superfície CAD.
Para cortar o modelo de superfície CAD por uma superfície definida pelo usuário, siga estas etapas:
- Digite a opção "Boundary Point" (Ponto de limite).
- Entre na caixa "CAD Element Selection" (Seleção de elementos CAD).
- Selecione a superfície.
- Selecione a opção "Cut CAD" (Cortar CAD) sem desmarcar a caixa "CAD Element Selection" (Seleção de elementos CAD).
Nesse ponto, o programa PC DMIS cortará a superfície selecionada para encontrar buracos.
Se não houver furos definidos no modelo de superfície CAD, não será necessário selecionar a opção "Cut CAD" (Cortar CAD). Nesse caso, o PC DMIS fará a varredura de acordo com os pontos de limite inicial e final definidos.
Para gráficos CAD complexos com várias superfícies, diferentes superfícies podem ser seccionadas em grupos. O número de grupos é restrito aos modelos de superfície CAD locais.
5. Varredura de perímetro
O método de varredura de perímetro só é aplicável a peças de trabalho com um modelo de superfície CAD.
Esse modo de digitalização usa o modelo matemático CAD para calcular o caminho de digitalização, que é deslocado do limite ou do contorno externo por uma distância selecionada pelo usuário.
Para criar uma varredura de limite, siga estas etapas:
- Primeiro, selecione a opção "Boundary Scan".
- Se for uma varredura de limite interno, selecione "Internal Boundary Scan" (Varredura de limite interno) na caixa de diálogo.
- Ao selecionar uma superfície de trabalho, inicie a caixa de seleção "Select" (Selecionar), destaque cada superfície selecionada e saia da caixa de seleção depois de selecionar todas as superfícies desejadas.
- Clique na superfície para determinar o ponto inicial do escaneamento.
- Clique na mesma superfície para determinar o ponto de direção da varredura.
- Clique na superfície para determinar o ponto final da varredura. Se nenhum ponto final for fornecido, o ponto inicial será usado como ponto final.
- Insira os valores correspondentes na caixa de edição "Scan Structure" (incluindo "Value Added", "CAD Tolerance", etc.).
- Selecione a opção "Calculate Boundary" (Calcular limite) para calcular o limite da varredura.
- Depois de confirmar que o valor do desvio está correto, pressione o botão "Generate Measuring Point" (Gerar ponto de medição). O programa DMIS para PC calculará automaticamente o valor teórico da varredura.
- Clique em "Create" (Criar).
6. Pontos de aplicação
(1) Para melhorar a precisão da aquisição de dados e a eficiência da medição, é importante escolher o modo de medição por escaneamento adequado com base nas características específicas e nos requisitos de modelagem da peça de trabalho que está sendo medida.
(2) O fixação A posição da peça de trabalho deve ser planejada cuidadosamente para facilitar o processo de medição e o movimento da sonda. Para garantir a precisão da modelagem, tente organizar a sonda de modo que ela conclua as medições de varredura de todos os objetos de uma só vez ao fixar a peça de trabalho.
(3) A seleção dos pontos de medição de escaneamento deve incluir pontos-chave das informações geométricas do contorno da peça de trabalho, e os pontos de medição devem ser adicionados adequadamente em peças com mudanças significativas de curvatura.
8. Gerenciamento de dados
1. Conversão de dados
Tarefas e requisitos para a conversão de dados:
(1) Converta o formato dos dados de medição no formato IGES reconhecido pelo software CAD e salve-o com um nome de produto ou um nome especificado pelo usuário após a combinação.
(2) Os dados com diferentes produtos, diferentes atributos e diferentes posicionamentos que podem causar confusão devem ser armazenados em arquivos separados e devem ser organizados e separados em arquivos IGES.
A conversão de dados é realizada pelo sistema de processamento de dados de medição por coordenadas.
Para saber o método de operação, consulte o manual do usuário do software.
2. Realocação e integração
Histórico do aplicativo
Durante o processo de levantamento e mapeamento de produtos, muitas vezes não é possível medir os dados geométricos do produto no mesmo sistema de coordenadas por vários motivos.
O primeiro motivo é que o tamanho do produto excede o curso da máquina de medição.
O segundo motivo é que a sonda de medição não consegue alcançar o lado oposto do produto.
O terceiro motivo é a falta de dados após a remoção da peça de trabalho e a necessidade de nova medição.
Nesses casos, é necessário medir cada parte do produto em diferentes estados de posicionamento (ou seja, diferentes sistemas de coordenadas), o que é conhecido como Medição de realocação do produto.
Na modelagem, os dados de diferentes sistemas de coordenadas em diferentes estados de posicionamento devem ser transformados no mesmo sistema de coordenadas, o que é chamado de Integração de dados de realocação.
Para modelos complexos ou grandes, muitas vezes são necessárias várias medições de posicionamento no processo de medição.
Os dados de medição finais devem ser realocados e integrados várias vezes de acordo com um caminho de conversão específico, para converter os dados medidos em cada posicionamento em dados de medição sob uma referência de posicionamento comum.
Princípio de integração de realocação
Há uma discrepância entre os dados de medição depois que a peça de trabalho é movida (realocada) e os dados de medição antes do movimento.
Para integrar os dados de medição realocados aos dados antes do movimento, é necessário estabelecer uma forma que possa ser medida antes e depois da realocação na peça de trabalho (chamada de Referência de Realocação). Desde que os resultados de medição da forma após a realocação correspondam aos resultados de medição antes da realocação por meio de uma série de transformações, os dados de medição realocados podem ser integrados aos dados antes do movimento.
O Benchmark de realocação serve como um elo na integração dos dados realocados.
Controle PID significa controle proporcional, integral e diferencial.
Parâmetro P:
O processo de resposta do sistema ao erro de posição pode ser determinado pela análise da relação entre a estabilidade, a rigidez e o erro de posicionamento do sistema.
Um valor mais baixo indica um sistema mais estável com oscilação reduzida, mas com rigidez mais fraca e maior erro de posicionamento.
Por outro lado, um valor mais alto resulta em maior rigidez e menor erro de posicionamento, mas o sistema pode sofrer oscilações.
I Parâmetro:
O controle do erro de posicionamento estático causado por atrito e carga é determinado pela relação entre o valor de controle e o tempo de chegada à posição teórica.
Um valor mais baixo resulta em um tempo de chegada mais longo.
Um valor mais alto aumenta a probabilidade de oscilação na posição teórica.
Parâmetro D:
O parâmetro fornece estabilidade e amortecimento ao sistema, evitando alterações excessivas de erro.
Um valor mais baixo resulta em uma resposta mais rápida do sistema ao erro de posição.
Um valor mais alto resulta em uma resposta mais lenta do sistema.
9. Manutenção diária
Para evitar a "síndrome das férias", é necessário alterar o modo de gerenciamento do CMM.
A CMM é composta de componentes complexos, incluindo peças mecânicas, peças de controle elétrico e sistemas de computador.
É importante fazer a manutenção adequada da MMC enquanto a estiver usando para medir peças de trabalho, a fim de prolongar sua vida útil.
A seguir, explicamos a manutenção básica do CMM a partir de três perspectivas.
Peças mecânicas
Há vários tipos de componentes mecânicos em uma máquina de medição por coordenadas (CMM). Para garantir o funcionamento adequado, é importante realizar a manutenção diária do sistema de transmissão e dos componentes do sistema de circuito de ar.
A frequência da manutenção deve ser determinada com base no ambiente operacional da CMM. Em salas de medição fina com condições ideais, recomenda-se a manutenção regular a cada três meses. Entretanto, em ambientes com altos níveis de poeira ou onde a temperatura e a umidade não atendem aos requisitos para a operação adequada, a manutenção deve ser realizada mensalmente.
Para a manutenção regular das máquinas de medição, é preciso entender os fatores que afetam as máquinas de medição:
Influência do ar comprimido na máquina de medição
Para escolher um compressor de ar adequado, é aconselhável incorporar um tanque de ar adicional. Isso aumentará a longevidade e a estabilidade da pressão do compressor de ar.
É importante que a pressão inicial do compressor de ar seja maior do que a pressão operacional necessária.
Ao ligar o equipamento, é recomendável ativar primeiro o compressor de ar e, em seguida, ligar a fonte de alimentação.
Influência do óleo e da água na máquina de medição
O ar comprimido é fundamental para o bom funcionamento de uma máquina de medição, portanto, é essencial fazer a manutenção adequada do circuito de ar.
As tarefas a seguir devem ser realizadas regularmente:
- Antes de usar a máquina de medição todos os dias, inspecione os tubos e filtros e drene a água e o óleo do filtro e do compressor de ar/tanque de ar.
- Limpe os elementos filtrantes do filtro e do pré-filtro conectados pelo menos a cada três meses.
- Reduza o intervalo se a qualidade do ar for ruim. Com o tempo, a poluição por óleo pode entupir os elementos do filtro, reduzindo a pressão real do ar operacional da máquina de medição e comprometendo sua operação normal.
- É necessário limpar regularmente os elementos do filtro.
- A limpeza diária do trilho-guia para remover manchas de óleo e poeira ajudará a manter o trilho-guia flutuante em boas condições de funcionamento.
Para proteger o trilho-guia da máquina de medição, devem ser criados bons hábitos de trabalho
Para garantir a segurança do trilho-guia, coloque um pano ou uma almofada de borracha embaixo dele.
Após o trabalho ou a conclusão das peças, certifique-se de limpar o trilho-guia.
Durante o uso da máquina de medição, procure manter uma temperatura ambiente consistente na sala de medição e durante a calibração.
Lembre-se de que os equipamentos elétricos, os computadores e o pessoal geram calor. Durante a instalação, organize os equipamentos elétricos, computadores etc. de modo que fiquem a uma distância suficiente da máquina de medição.
Gerencie rigorosamente a sala de medição e minimize a presença de pessoal extra.
O gerenciamento do ambiente operacional das máquinas de medição de alta precisão deve ser especialmente rigoroso.
Influência da direção do vento do ar condicionado na temperatura da máquina de medição
Para o ar-condicionado na sala de medição, é melhor escolher um ar-condicionado de frequência variável.
O ar-condicionado de frequência variável tem excelentes recursos de economia de energia e, o mais importante, forte capacidade de controle de temperatura. Na capacidade normal, ele pode regular a temperatura em ±1 ℃.
Observe que o ar do ar-condicionado pode não estar a 20 ℃ e não deve ser direcionado diretamente para a máquina de medição. Para evitar que isso aconteça, a direção do vento pode ser redirecionada para uma parede ou lateral, levando a uma grande diferença de temperatura na sala.
O ar-condicionado deve ser instalado de forma planejada, soprando o ar para a área principal da sala. A direção do vento deve ser para cima para criar um grande ciclo (não em direção à máquina de medição) e equilibrar a temperatura interna o máximo possível.
Se for viável, um duto de ar pode ser instalado para fornecer ar para a parte superior da sala por meio de placas de orifício de camada dupla, com a saída de ar de retorno na parte inferior da sala. Isso criará um fluxo de ar irregular e tornará o controle de temperatura na sala de medição mais eficiente.
Influência do tempo de comutação do ar-condicionado na temperatura da sala de máquinas
Você deve ativar o sistema de ar condicionado em seu local de trabalho todas as manhãs e desligá-lo no final do dia.
Quando a temperatura na sala de espera tiver se estabilizado por aproximadamente quatro horas, a precisão da máquina de medição também ficará estável.
No entanto, esse procedimento operacional prejudica significativamente a eficiência da máquina de medição, o que torna difícil garantir a precisão tanto no inverno quanto no verão.
Isso também terá um efeito substancial na estabilidade normal da máquina de medição.
Influência da estrutura da sala de máquinas na temperatura da sala de máquinas
Para manter uma temperatura constante na sala da máquina de medição, devem ser implementadas medidas de isolamento térmico.
Se houver janelas, devem ser instaladas janelas com vidros duplos e a luz solar direta deve ser evitada.
O uso de uma sala de transição ajudará a reduzir a perda de temperatura.
O sistema de ar condicionado na sala de máquinas deve ter capacidade comparável à da sala ao redor.
Se a sala de máquinas for muito grande ou muito pequena, ela apresentará dificuldades no controle da temperatura.
Em áreas com alta umidade no sul ou durante o verão ou a estação chuvosa no norte, o desligamento repentino do ar-condicionado de resfriamento pode causar a rápida condensação do vapor de água no ar nas peças de baixa temperatura e nos trilhos de guia da máquina de medição, levando a uma corrosão grave dos flutuadores de ar e de algumas peças da máquina, afetando sua vida útil.
A umidade excessiva também pode causar corrosão ou curtos-circuitos nas placas de circuito de computadores e sistemas de controle.
A baixa umidade pode afetar gravemente a absorção de água do granito e causar deformação.
A poeira e a eletricidade estática podem danificar o sistema de controle.
Portanto, a umidade na sala de máquinas deve ser controlada dentro de 60% ± 5%.
A má vedação e a alta umidade do ar na sala da máquina de medição são as principais causas da alta umidade.
Em áreas com alta umidade, a sala de máquinas deve ter melhor vedação e, se necessário, devem ser adicionados desumidificadores.
Para resolver isso, o modo de gerenciamento deve ser alterado de "limpeza antes das férias" para "limpeza durante o trabalho", e o ar-condicionado e o desumidificador devem ser ligados para remover a umidade.
A limpeza regular da poeira no computador e no sistema de controle reduzirá ou evitará possíveis problemas.
O uso de peças padrão para a inspeção da máquina é eficaz, mas relativamente complicado e só pode ser realizado periodicamente.
Um método mais conveniente é usar uma peça representativa, compilar um programa de medição automática e realizar várias medições após verificar a precisão da máquina.
Os resultados podem ser calculados de acordo com as leis estatísticas, e um valor razoável e uma faixa de tolerância podem ser registrados.
O operador pode verificar essa peça com frequência para determinar a precisão da máquina.
Ajuste do equilíbrio do eixo Z
O equilíbrio do eixo Z da máquina de medição é dividido em equilíbrio pneumático e de peso, o que ajuda a equilibrar o peso do eixo Z e garante sua operação estável.
Se o interruptor de equilíbrio da pressão de ar for acionado acidentalmente, o eixo Z ficará desequilibrado.
Para resolver esse problema, siga estas etapas:
- Gire a base de medição em 90 graus para evitar que o cabeçote de medição entre em contato durante a operação.
- Ative o interruptor de "parada de emergência".
- Uma pessoa deve segurar fisicamente o eixo Z e movê-lo para cima e para baixo para avaliar seu equilíbrio.
- Outra pessoa deve ajustar a pressão do ar válvula de equilíbrioFaça pequenos ajustes de cada vez.
Duas pessoas podem trabalhar juntas para ajustar o equilíbrio do eixo Z até que ele pareça equilibrado ao se mover para cima e para baixo.
O interruptor de fim de curso serve para proteger a máquina e estabelecer sua posição inicial.
Normalmente, a chave de fim de curso é uma chave de contato ou uma chave fotoelétrica.
A chave de contato é propensa a mudar de posição ao empurrar manualmente o eixo, o que leva a um mau contato.
Para garantir um bom contato, a posição do interruptor pode ser ajustada adequadamente.
Ao usar uma chave fotoelétrica, é importante verificar se a posição do inserto está normal e remover regularmente qualquer poeira para manter sua operação adequada.
10. Precauções de uso e segurança da CMM
Somente pessoas que receberam treinamento e obtiveram certificação operacional têm permissão para operar a CMM.
Antes de iniciar a máquina todos os dias, o gabinete de controle só pode ser aberto quando a pressão de fornecimento de ar atender aos requisitos: a pressão de fornecimento de ar deve ser ≥ 0,65 MPa e a pressão de ar da máquina deve ser ≥ 0,4 MPa.
Se a altura da mistura de óleo e água no copo de armazenamento de água triplo exceder 5 mm, a água deverá ser drenada manualmente.
Se a pressão de suprimento de ar da máquina estiver normal, mas a pressão no tripleto não puder ser ajustada para o valor normal, o elemento do filtro precisará ser substituído.
O ambiente operacional da CMM deve ter uma temperatura de 20 ± 2°C e uma umidade relativa de 40-75%.
A fonte de alimentação regulada deve ter uma tensão de saída de 220 ± 10V.
Nenhum objeto deve ser colocado sobre o trilho-guia da máquina.
Não toque a superfície de trabalho do trilho-guia com as mãos.
Antes de ligar a máquina todos os dias, limpe a superfície do trilho-guia de três eixos com um pano de algodão puro de tecido alto embebido em álcool anidro, e a máquina só poderá ser operada quando a superfície do trilho-guia estiver seca.
Não se deve usar álcool para limpar a superfície pintada ou a régua da grade.
A sequência de inicialização é a seguinte:
- Ligue a caixa de força
- Ligue a fonte de ar total
- Ligue a secadora fria
- Ligue a válvula de ar
- Ligue a fonte de alimentação do gabinete de controle
- Ligue o controlador do pedestal
- Ligue o motor quando a luz da caixa de operação estiver acesa (a tecla de parada de emergência deve ser liberada)
- Após a conclusão da autoinspeção do sistema, inicie o software de medição, zere os três eixos (vá para casa) e entre no estado normal de trabalho após a conclusão automática.
A máquina deve retornar ao ponto zero após cada inicialização.
Antes de retornar ao ponto zero, mova a sonda para uma posição segura para garantir que não haja obstáculos durante a reinicialização da sonda e o movimento para cima no eixo Z.
Ao substituir a sonda, use as ferramentas especiais fornecidas com a máquina e calibre a nova sonda:
- Inicie o software antes de abrir o software de medição (método recomendado)
- Se o software de medição estiver ligado, pressione a chave de parada de emergência na caixa de operação e ligue-a após a substituição.
Se for exibida uma caixa de diálogo de mensagem de erro da sonda, feche-a (ou digite 100.0.0.1 na coluna de entrada do endereço da Web para visualizar o histórico e a mensagem de erro). Essa mensagem será automaticamente apagada durante a próxima inicialização.
Durante a operação manual, pressione a tecla slow ao se aproximar do ponto de amostragem.
Ao girar a sonda, calibrar a sonda, trocar automaticamente a sonda ou realizar qualquer outra operação, certifique-se de que não haja obstáculos no caminho de movimento da sonda.
Quando o programa não estiver em uso ou não estiver programado, defina a velocidade na caixa de operação como 0.
Durante a primeira operação do programa, reduza a velocidade para 10-30% e monitore se a trilha de operação atende aos requisitos.
Ao manusear e colocar peças de trabalho, primeiro mova a sonda para uma posição segura e certifique-se de que as peças de trabalho não colidam com a mesa de trabalho, especialmente com a superfície do trilho de guia da máquina.
A sequência de desligamento é a seguinte:
- Mova o eixo Z para a esquerda, a frente e a parte superior da máquina e gire o ângulo da sonda para A0B0.
- Limpe a superfície de trabalho.
- Desligue o controlador de pedestal, a fonte de alimentação do gabinete de controle, a válvula de ar, o secador, a fonte de ar principal e a caixa de força, nessa ordem.
As esferas padrão de aço que não forem usadas por um longo período de tempo devem ser vedadas com óleo para evitar ferrugem.
Ao fixar uma peça de trabalho com uma incrustação na superfície de trabalho de granito, o torque não deve exceder 20 Nm.
Se alguma condição anormal for detectada (exceto mensagens de erro relacionadas à substituição da sonda), registre as informações de erro exibidas pelo software, entre em contato com o departamento de assistência técnica da Hexcon por fax ou telefone e não faça inspeção ou manutenção sem orientação e permissão.
Não instale nenhum software que não esteja relacionado às três coordenadas no computador para garantir a operação confiável do sistema.
O ar-condicionado deve permanecer funcionando 24 horas por dia e sua manutenção deve ser realizada no outono para garantir a operação normal das três coordenadas.
Perguntas frequentes sobre a máquina CMM
O que é CMM?
A máquina de medição de três coordenadas é comumente referida como um sistema de medição que determina as coordenadas tridimensionais dos pontos de superfície de uma peça de trabalho por meio do movimento relativo do sistema de sonda e da peça de trabalho.
Também é conhecida como máquina de medição por coordenadas (CMM) ou instrumento de medição de três coordenadas.
A temperatura tem grande influência nos resultados de medição da CMM?
A CMM é um sistema de medição complexo que combina luz, maquinário, eletricidade, computador e tecnologia de controle, o que significa que há muitos fatores que podem afetar a incerteza dos resultados da medição.
Entretanto, para sistemas de coordenadas médios e pequenos, o principal fator que afeta a incerteza dos resultados da medição é o desvio da temperatura padrão de medição (20°C) da temperatura ambiente. Para obter resultados precisos de medição de coordenadas, a temperatura ambiente deve ser rigorosamente controlada dentro da faixa especificada pelas instruções da máquina de coordenadas.
Quais itens da CMM precisam ser calibrados e qual é o intervalo de calibração?
O padrão de calibração atual para três coordenadas é a especificação de calibração JJF1064-2000 para máquinas de medição por coordenadas, que especifica que os itens de calibração são o erro de indicação de medição de comprimento e o erro de detecção.
Recomenda-se que a calibração seja feita uma vez por ano.
Quando a CMM precisa calibrar 21 erros?
O erro de 21 pontos é a base da precisão da CMM, e sua calibração é complexa.
Embora não esteja especificado na norma, a calibração do erro de 21 pontos é necessária nas seguintes circunstâncias: ao aceitar uma nova máquina, quando o resultado da calibração do erro de medição do comprimento estiver fora da faixa de tolerância, após a máquina de coordenadas ter sido realocada e após a máquina de coordenadas ter sido reparada.