Motores EV: Tipos, estruturas e análise de desempenho
O que alimenta seu veículo elétrico? De motores assíncronos CA a motores síncronos de ímã permanente e até mesmo motores de relutância comutada, cada tipo oferece vantagens e desvantagens exclusivas. Este artigo explora as estruturas, os princípios e as aplicações desses principais tipos de motores, ajudando você a entender como eles afetam o desempenho e a eficiência dos veículos elétricos. Mergulhe de cabeça e descubra qual motor poderá ser usado em seu próximo passeio!
Com base nos requisitos fundamentais de desempenho do motor de acionamento para veículos de energia nova, os tipos de motores de acionamento comumente usados são divididos em três categorias principais: Motores assíncronos CA, motores síncronos de ímã permanente e motores de relutância comutada.
Atualmente, cada modelo de carro equipado por várias montadoras usa diferentes tipos de motores de acionamento.
Portanto, para escolher o tipo de motor para um veículo de energia nova, é importante entender a estrutura, o princípio de funcionamento e as vantagens e desvantagens do motor de acionamento.
I. Motor assíncrono CA
1. Estrutura do motor assíncrono CA
O motor assíncrono CA, também conhecido como motor de indução, consiste principalmente de estator, rotor, eixo do motor, rolamentos dianteiros e traseiros, tampa da extremidade, sensor de posição, sensor de temperatura, chicote de fiação de baixa tensão e chicote de fiação de energia de alta tensão.
O estator consiste no núcleo de ferro do estator e no enrolamento trifásico; o rotor geralmente usa um rotor de gaiola de esquilo, que inclui o núcleo de ferro do rotor e o enrolamento de gaiola de esquilo.
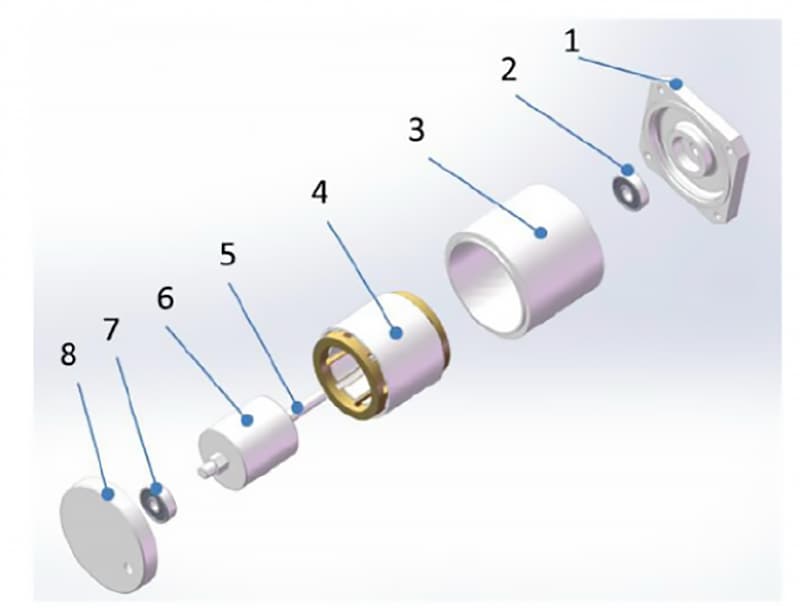
Dependendo da potência do motor, é possível escolher entre os métodos de resfriamento a água ou a ar. (Figura 1)
Figura 1 Diagrama esquemático estrutural do motor assíncrono CA
1- Tampa da extremidade dianteira 2 - Rolamento dianteiro 3- Carcaça do motor 4- Rotor gaiola de esquilo 5- Eixo do motor 6- Estator 7- Rolamento traseiro 8- Tampa da extremidade traseira 9- Sensor de posição 10- Tampa de manutenção do sensor
2. Princípio de funcionamento do motor assíncrono CA
(1) Princípio de funcionamento do acionamento de motor assíncrono CA
1) O estator fornece um campo magnético rotativo. Para fornecer torque, o motor assíncrono CA precisa passar energia CA trifásica pela bobina do estator, criando um campo magnético de rotação contínua (com uma velocidade de rotação do campo magnético de ns).
O motor assíncrono de corrente alternada exige que os enrolamentos trifásicos do estator sejam simétricos e que o núcleo de ferro do estator esteja espaçado em 120 graus elétricos. A corrente que passa pelo enrolamento trifásico simétrico também deve ser simétrica, com o mesmo tamanho, frequência e diferença de fase de 120 graus. A velocidade de rotação do campo magnético rotativo é dada pela equação (1).
ns=60f/p (1)
Nessa equação, ns é a velocidade de rotação do campo magnético giratório (também conhecida como velocidade síncrona), r/min; f é a frequência da alimentação CA trifásica, Hz; p é o número de pares de polos.
Para um motor de acionamento que foi projetado e colocado em produção, o número de pares de polos é fixo, portanto, o fator que determina a velocidade de rotação do campo magnético é a frequência da energia CA trifásica. Como a frequência da rede elétrica em nosso país é f=50Hz, há uma relação linear entre a velocidade do motor e o número de pares de polos. (Figura 2)
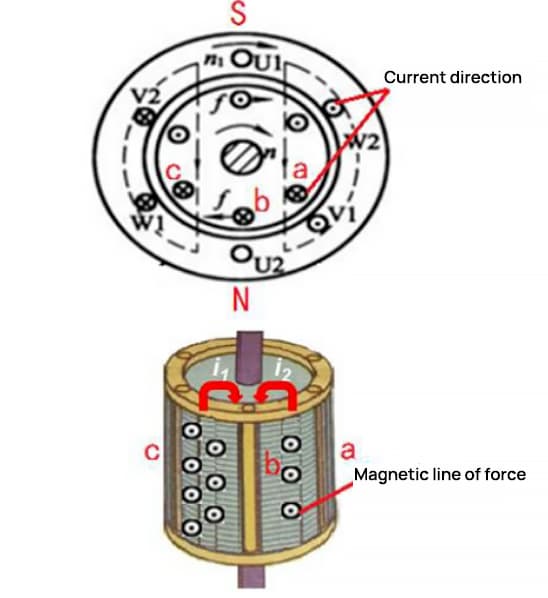
Figura 2 Diagrama do campo magnético rotativo dos enrolamentos do estator de dois polos
2) O rotor em gaiola de esquilo fornece correntes de Foucault induzidas. Como o estator fornece um campo magnético rotativo, uma corrente de Foucault é induzida no condutor do rotor em gaiola de esquilo, conforme mostrado na Figura 3.
Figura 3 Corrente parasita nos enrolamentos do rotor gaiola
Na área magnética entre os condutores c e b do enrolamento em gaiola de esquilo, há linhas de força magnéticas externas, e essas linhas de força magnéticas são aprimoradas sob a ação do campo magnético giratório.
Portanto, uma corrente parasita i1 será induzida nos condutores c, b; da mesma forma, o enfraquecimento das linhas de força magnética na área entre o condutor a e o condutor b induzirá uma corrente parasita i2 no condutor.
A corrente no condutor b, sob a ação do campo magnético giratório do estator, fará com que o condutor b do enrolamento em gaiola de esquilo fique sujeito à força eletromagnética, fazendo com que o rotor gere um torque eletromagnético e comece a girar. O rotor giratório gradualmente alcança o campo magnético giratório, girando a uma velocidade n ligeiramente mais lenta do que a "velocidade síncrona ns" do campo magnético.
Esse fenômeno, em que a velocidade de rotação do rotor n é ligeiramente mais lenta do que a velocidade do campo magnético do estator ns, é chamado de deslizamento do rotor. Esse deslizamento assíncrono permite que o condutor do rotor em gaiola de esquilo corte continuamente as linhas de força magnéticas, produzindo correntes parasitas induzidas.
Consequentemente, no rotor, a energia elétrica é convertida em energia mecânica, garantindo uma saída externa contínua.
(2) O princípio da geração de energia em motores assíncronos CA
De acordo com a Lei de Faraday da Indução Eletromagnética, quando uma seção do condutor de circuito fechado atravessa as linhas do campo magnético em movimento, uma corrente induzida é gerada dentro do condutor, com a força eletromotriz gerada conhecida como força eletromotriz induzida.
Em um motor assíncrono CA, quando o motor é usado como gerador, o estator é energizado com uma corrente trifásica para fornecer o campo magnético, e o enrolamento do rotor fornece o condutor.
Quando uma força mecânica externa, como o eixo de acionamento de um carro, aciona o eixo do rotor, fazendo com que o rotor se mova, se a velocidade do rotor for maior do que a velocidade síncrona do campo magnético rotativo do estator, o motor assíncrono CA atuará como um gerador.
A direção do rotor que corta o campo magnético giratório é oposta à de quando ele funciona como um motor de acionamento, portanto, a direção da força eletromotriz induzida do rotor também é invertida.
Durante o processo de geração de energia, o rotor do motor sofre um torque eletromagnético que é oposto à força de arrasto externa, fazendo com que a velocidade do rotor diminua.
3. Vantagens, desvantagens e aplicações de motores assíncronos CA
Os motores assíncronos CA são excelentes no fornecimento de torque de saída ajustável em uma ampla faixa, capazes de aumentar forçosamente o torque de saída em períodos curtos durante a aceleração ou a subida. Os veículos elétricos acionados por motores síncronos de ímã permanente geralmente empregam mecanismos adicionais de caixa de engrenagens para aumentar o torque para aumentar a velocidade.
Entretanto, os motores assíncronos CA apresentam várias desvantagens. Devido à excitação unilateral, eles exigem correntes de partida maiores e mais corrente por unidade de torque produzido. O estator abriga correntes de excitação reativas, resultando em maior consumo de energia do que os motores síncronos de ímã permanente, com um fator de potência defasado.
As condições de sobrecarga ocorrem com frequência durante acionamentos de serviço pesado. Sua estrutura relativamente complexa exige alta especialização em tecnologia de controle, o que torna sua fabricação mais cara, além de ter uma densidade de potência comparativamente menor.
Atualmente, os motores assíncronos CA são comumente usados como motores de acionamento em veículos elétricos desenvolvidos nos Estados Unidos.
II. Motor síncrono de ímã permanente
1. Estrutura do motor síncrono de ímã permanente
A estrutura de um motor síncrono de ímã permanente é composta por estator, rotor, eixo do motor, rolamentos dianteiros e traseiros, tampa da extremidade, canal de água de resfriamento, sensor de posição, sensor de temperatura, chicote de baixa tensão e chicote de alimentação.
O estator é formado pelo núcleo de ferro do estator e pelos enrolamentos trifásicos; o rotor é composto por polos de ímã permanente e um núcleo de ferro, sendo o núcleo de ferro feito de materiais empilhados. chapas de aço silício.
A disposição dos ímãs permanentes no rotor inclui principalmente rotores de ímã permanente montados na superfície, embutidos na superfície e internos, sendo que os rotores de ímã permanente internos são comumente usados em motores de energia nova. (Figura 4)
Figura 4 Diagrama esquemático de um sistema síncrono de ímã permanente estrutura do motor
1- Tampa da extremidade dianteira 2 - Rolamento da extremidade dianteira 3- Carcaça do motor 4- Estator 5- Eixo do motor 6- Rotor de ímã permanente integrado 7- Rolamento da extremidade traseira 8- Tampa da extremidade traseira (sensor de posição incorporado)
2. Princípio de funcionamento do motor síncrono de ímã permanente
(1) Princípio de acionamento do motor síncrono de ímã permanente
O campo magnético giratório é fornecido pelo estator, produzido da mesma forma e na mesma velocidade que um motor assíncrono CA. Os polos magnéticos são fornecidos pelos ímãs permanentes do rotor.
Assim, o campo magnético giratório gerado pelo estator forma um circuito com os polos de ímã permanente e o núcleo de ferro do rotor. Seguindo o princípio da relutância magnética mínima, ou seja, o fluxo magnético sempre se fecha ao longo do caminho de menor resistência magnética, o rotor é atraído para a rotação pela força eletromagnética do campo giratório.
Consequentemente, o rotor de ímã permanente gira de forma síncrona com o campo magnético rotativo gerado pelo estator, impulsionando assim a rotação do eixo do motor.
(2) Princípio de geração de energia do motor síncrono de ímã permanente
Seguindo a lei de Faraday da indução eletromagnética, uma parte do condutor do circuito fechado é fornecida pelos enrolamentos trifásicos do estator, com o campo magnético fornecido pelos ímãs permanentes no rotor.
Quando o torque externo faz o rotor girar, ele gera um campo magnético rotativo, cortando parte dos condutores nos enrolamentos trifásicos do estator e induzindo uma corrente trifásica simétrica.
Nesse ponto, a energia cinética do rotor é convertida em energia elétrica, e o Motor Síncrono de Ímã Permanente funciona como um gerador.
3. Vantagens, desvantagens e escopo de aplicação do motor síncrono de ímã permanente
As vantagens de um motor síncrono de ímã permanente incluem seu tamanho pequeno, peso leve, alta densidade de potência, menor consumo de energia, menor aumento de temperatura e maior eficiência em comparação com os motores assíncronos.
Ele pode ser projetado como um motor estruturado de alto torque de partida e alta capacidade de sobrecarga com base nos requisitos.
O motor síncrono de ímã permanente é rigorosamente sincronizado e tem bom desempenho de resposta dinâmica, adequado para controle de frequência; o torque e a velocidade do motor podem ser ajustados em uma ampla faixa, alterando a corrente e a frequência.
No entanto, o material de ímã permanente usado nos motores síncronos de ímã permanente geralmente é um material magnético forte de neodímio, ferro e boro, que é relativamente frágil e pode quebrar sob vibração intensa.
Além disso, o uso de material de ímã permanente no rotor pode levar à deterioração magnética na operação do motor e a situações de superaquecimento, resultando em uma diminuição da potência.
Atualmente, os motores síncronos de ímã permanente são amplamente utilizados em motores de veículos de energia nova, com os novos mercados de energia na Ásia e na Europa utilizando principalmente motores síncronos de ímã permanente como motores de energia nova.
III. Motor de relutância comutada
1. Estrutura do motor de relutância comutada
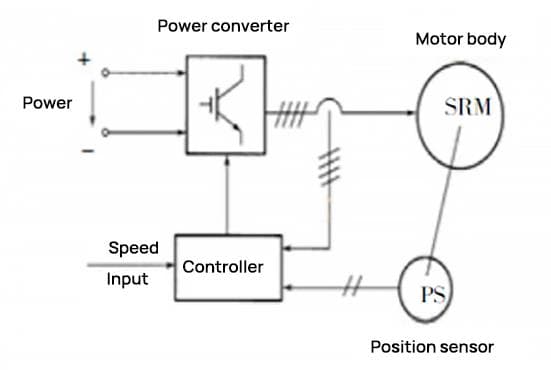
O Motor de Relutância Comutada (SRM) é um motor mecatrônico típico, também conhecido como "Sistema de Acionamento de Relutância Comutada". O motor inclui principalmente quatro componentes: o próprio SRM, um conversor de energia, sensores de posição do rotor e um controlador, conforme mostrado na Figura 5.
Figura 5 Diagrama de blocos do sistema do motor de relutância comutada
A estrutura principal do SRM inclui o estator, o rotor, os sensores de posição, os rolamentos dianteiros e traseiros, as tampas das extremidades dianteira e traseira e a carcaça do motor, conforme ilustrado na Figura 6. O estator compreende o núcleo do estator e os enrolamentos.
Figura 6 Estrutura do motor de relutância comutada
1- Tampa da extremidade dianteira 2 - Rolamento da extremidade dianteira 3- Rotor 4- Eixo do motor 5- Estator 6- Carcaça do motor 7- Rolamento da extremidade traseira 8- Tampa da extremidade traseira 9- Sensor de posição 10- Tampa de manutenção do sensor 11- Ventilador de resfriamento 12- Tampa da extremidade do ventilador
Tanto o núcleo do estator quanto o rotor utilizam estruturas de polo saliente e são feitos de chapas laminadas de aço silício. Os polos salientes do estator são equipados com enrolamentos, enquanto o rotor não tem enrolamentos nem ímãs permanentes.
A estrutura trifásica de 6/4 polos indica que o estator do motor tem seis polos salientes e o rotor tem quatro polos salientes. Os enrolamentos concentrados em dois polos salientes simétricos do estator são conectados em série para formar uma fase, e o número de fases é igual ao número de polos salientes do estator dividido por dois, conforme mostrado na Figura 7(a).
Figura 7 Pólo saliente e estrutura do enrolamento do motor de relutância comutada
A estrutura trifásica de 12/8 polos indica que o estator do motor tem doze polos salientes e o rotor tem oito polos salientes. Os enrolamentos em quatro polos salientes simétricos do estator são conectados em série para formar uma fase, e o número de fases é igual ao número de polos salientes do estator dividido por quatro, conforme mostrado na Figura 7(b).
Quanto mais fases um motor de relutância comutado tiver, menor será o ângulo de passo, mais suave será a operação e mais favorável será a redução da ondulação de torque. No entanto, o controle se torna mais complexo, o que leva a um aumento no número de dispositivos de comutação principais e nos custos.
O cálculo do ângulo de passo é mostrado na equação (2):
α = 360° × (Número de polos do estator - Número de polos do rotor) / (Número de polos do estator)
Por exemplo, para um motor trifásico de 6/4 polos, o ângulo de passo α = 360° × 2/(6×4) = 30°.
2. Princípio de funcionamento do motor de relutância comutada
(1) Princípio de operação do acionamento do motor de relutância comutada
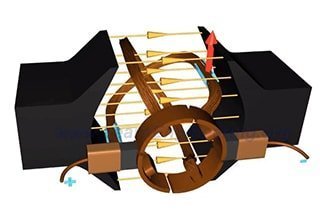
Conforme mostrado no diagrama do princípio de funcionamento do SRM trifásico de 12/8 polos na Figura 8, quando a corrente do enrolamento da fase A controla o fechamento da chave principal S1, S2, a fase A é energizada e magnetizada.
Figura 8 Princípio de funcionamento do motor de relutância comutada
A força do campo magnético gerada dentro do motor forma um campo magnético radial com OA como eixo. As linhas de força magnética desse campo são dobradas quando passam pelo espaço de ar entre os polos salientes do estator e os polos salientes do rotor.
Nesse momento, a relutância magnética do circuito magnético é maior do que quando o polo saliente do estator e o polo saliente do rotor coincidem. Portanto, o polo saliente do rotor sofre a ação da atração magnética, que alinha o eixo do polo do rotor Oa com o eixo do polo do estator OA.
Isso gera um torque eletromagnético de propriedade de relutância magnética, fazendo com que o rotor comece a girar no sentido anti-horário. Quando a corrente da fase A é desligada e a fonte de alimentação da fase B é estabelecida, o campo magnético dentro do motor gira 30 graus.
Em seguida, o rotor gira mais 15 graus no sentido anti-horário sob a ação da tração eletromagnética. Se a energia for fornecida sequencialmente aos enrolamentos das fases A-B-C-A, o rotor girará continuamente no sentido anti-horário.
Quando os enrolamentos do estator em cada fase são energizados, o campo magnético do estator gira 3×30 graus e o rotor gira um passo do polo do rotor de 3×15 graus (ou seja, 360 graus / número de polos salientes do rotor).
Se a energia for fornecida sequencialmente aos enrolamentos da fase A-C-B-A, o rotor girará no sentido horário. O sentido de rotação do motor de relutância comutado não está relacionado ao sentido da corrente, mas é determinado pela sequência de ligação dos enrolamentos de fase do estator.
Na operação real de motores multifásicos, também é comum que dois ou mais enrolamentos de fase sejam energizados simultaneamente.
(2) Princípio de funcionamento de um gerador de relutância comutada
O estado de funcionamento de um gerador de relutância comutado envolve três condições: o estado de excitação, o estado de continuação e o estado de geração de energia, conforme demonstrado pela forma de onda da indutância de fase L na Figura 10.
Figura 9 Diagrama esquemático do estado de funcionamento de um motor de relutância comutado
Figura 10 Alterações na indutância de fase com a posição do rotor
Na Figura 9, o ângulo θ é definido como o ângulo entre o eixo do polo do dente do rotor e o eixo da ranhura do dente do estator. Quando o eixo do polo do dente do rotor se alinha com o eixo da ranhura do dente do estator correspondente, a indutância de fase está em seu mínimo (definido como θ=0°). A indutância de fase do enrolamento permanece constante em Lmin até que a borda dianteira do polo do rotor encontre a borda traseira do polo do estator (θ=θ1).
À medida que o rotor continua a girar e o polo do rotor começa a se sobrepor ao polo do estator, até que a borda de fuga do polo do rotor e a borda de fuga do polo do estator se alinhem totalmente (nesse momento, θ=θ2), a indutância de fase do enrolamento aumenta linearmente nessa região, atingindo um máximo de Lmax.
Quando o rotor continua a girar de modo que a borda dianteira do polo do rotor se alinhe com a borda dianteira do polo do estator (nesse momento, θ=θ4), a indutância de fase permanece em Lmax.
De acordo com a teoria básica do campo eletromagnético, a existência de um campo magnético é acompanhada pelo torque eletromagnético do rotor do motor, que pode ser representado pela equação (3).
Se os enrolamentos do motor de relutância comutado forem ligados e desligados entre θ3 e θ4, o motor funcionará como um gerador. Nesse momento, uma corrente se forma na região de indutância decrescente, portanto dL/dθ<0.
Se a corrente passar pelos enrolamentos de fase nesse momento, será gerado um torque de frenagem (T(θ, i)<0). Se uma força mecânica externa mantiver a rotação do motor, o motor absorve energia mecânica e a converte em saída elétrica, indicando que o motor de relutância comutado está operando no modo gerador.
3. Vantagens, desvantagens e escopo de aplicação dos motores de relutância comutada
As vantagens dos motores de relutância comutada são sua estrutura simples e confiável, bom desempenho de partida, alta eficiência e baixo custo. Eles oferecem uma ampla gama de recursos de controle de velocidade, variando a condução, os ângulos de desligamento e a tensão. No entanto, as desvantagens incluem ondulação de torque substancial e alto ruído.
Atualmente, eles são usados em alguns veículos pequenos movidos a eletricidade, como scooters elétricos de quatro rodas e carros de patrulha.
IV. Conclusão
Devido às características de desempenho distintas exigidas pelos motores de propulsão dos veículos de energia nova, o tipo de motor de acionamento selecionado varia entre os diferentes modelos do mercado.
Este artigo descreve a estrutura e os princípios de funcionamento dos motores de acionamento de energia nova comumente usados, como motores assíncronos CA, motores síncronos de ímã permanente e motores de relutância comutada. Essas informações ajudarão a entender melhor esses motores de acionamento.
Além disso, a estrutura e os princípios de cada tipo de motor são diferentes, o que leva a uma ampla gama de aplicações. De acordo com o planejamento estratégico industrial nacional, a pesquisa com foco nos sistemas de acionamento elétrico de veículos ecológicos de energia nova continuará a se expandir. Consequentemente, a variedade e o nível tecnológico dos motores também continuarão avançando.
Como fundador do MachineMFG, dediquei mais de uma década de minha carreira ao setor de metalurgia. Minha vasta experiência permitiu que eu me tornasse um especialista nas áreas de fabricação de chapas metálicas, usinagem, engenharia mecânica e máquinas-ferramentas para metais. Estou sempre pensando, lendo e escrevendo sobre esses assuntos, esforçando-me constantemente para permanecer na vanguarda do meu campo. Permita que meu conhecimento e experiência sejam um trunfo para sua empresa.
Você já se perguntou como os trens podem flutuar sobre os trilhos ou como os robôs conseguem realizar movimentos precisos? Este artigo revela o fascinante mundo dos motores lineares, explicando seus princípios, tipos e vantagens exclusivas....
Os sistemas servo são parte integrante dos produtos eletromecânicos, fornecendo o mais alto nível de resposta dinâmica e densidade de torque. Por isso, a tendência no desenvolvimento de sistemas de acionamento é substituir os...
Você já se perguntou o que diferencia os motores CC dos motores CA? Neste artigo, exploramos as diferenças fundamentais entre esses dois tipos de motores, incluindo seus princípios operacionais,...
No mundo acelerado da automação industrial, os servomotores são os heróis anônimos que impulsionam a precisão e a eficiência. Mas, com inúmeros fabricantes disputando a atenção, como saber quais são...
Você já se perguntou como as máquinas convertem forças invisíveis em movimentos poderosos? Nesta postagem do blog, exploraremos o fascinante mundo das transmissões pneumáticas e hidráulicas. Você aprenderá como essas...
Você já se perguntou o que mantém o mundo girando sem problemas? Os heróis desconhecidos nos bastidores são os rolamentos. Esses componentes pequenos, mas poderosos, desempenham um papel fundamental na redução do atrito...
Você já se perguntou o que alimenta as máquinas que movem nosso mundo? As caixas de engrenagens são os heróis desconhecidos por trás de muitos setores, do automotivo à energia eólica. Neste artigo, você explorará...
Escolher o servomotor certo para seu projeto pode ser uma tarefa difícil com tantas opções disponíveis. Este artigo simplifica o processo, detalhando as principais considerações: aplicação...
Como os motores elétricos convertem eletricidade em movimento? Imagine um mundo em que quase metade de nossa energia é acionada por esses motores. Este artigo analisa a ciência por trás dos motores elétricos, explicando...