Explorando os tipos e princípios de motores na fabricação
Imagine o mundo sem o zumbido dos motores - sem carros, sem eletrodomésticos, sem máquinas industriais. Os motores convertem energia elétrica em energia mecânica, alimentando tudo, desde brinquedos até gigantes da manufatura. Neste artigo, exploraremos vários tipos de motores, seus princípios de funcionamento e suas aplicações. Ao compreender esses fundamentos, você terá uma visão de como esses dispositivos indispensáveis moldam nossa vida moderna e as inovações que eles impulsionam no cenário industrial.
Quase metade do consumo mundial de energia é atribuído a motores, o que torna o uso eficiente de motores uma das medidas mais eficazes para lidar com os problemas globais de energia.
Um motor é um dispositivo que converte energia elétrica em energia mecânica. Ele utiliza uma bobina energizada (o enrolamento do estator) para gerar um campo magnético rotativo, que atua sobre o rotor (como uma estrutura de alumínio fechada em gaiola de esquilo) para criar um torque magnético rotativo.
Os motores são divididos em motores de corrente contínua (CC) e motores de corrente alternada (CA) com base no tipo de fonte de alimentação usada. A maioria dos motores no sistema de energia são motores CA, que podem ser síncronos ou assíncronos (a velocidade de rotação do campo magnético do estator do motor não está sincronizada com a velocidade de rotação do rotor).
Um motor consiste principalmente em um estator e um rotor. A direção do movimento do condutor energizado no campo magnético está relacionada à direção da corrente e à direção das linhas do campo magnético. O princípio de funcionamento de um motor é a força do campo magnético sobre a corrente, fazendo com que o motor gire.
O controle do motor refere-se ao controle da partida, da aceleração, da operação, da desaceleração e da parada do motor. Há diferentes requisitos e objetivos, dependendo do tipo de motor e das circunstâncias em que o motor é usado. Para motores, por meio do controle do motor, as metas de partida rápida, resposta rápida, alta eficiência, alta saída de torque e alta capacidade de sobrecarga são alcançadas.
Os motores padrão, servomotores, motores de passo e servomotores mencionados aqui se referem a micromotores CC, que encontramos com frequência. Um motor, também conhecido como "motor", refere-se a esse dispositivo de indução eletromagnética que mantém a transformação ou a transmissão de energia eletromagnética de acordo com a lei de Faraday da indução eletromagnética.
Um motor, também conhecido como "máquina elétrica", é representado no circuito de potência pela letra inglesa "M" (anteriormente representada por "D"). Sua principal função é gerar torque de acionamento como fonte de energia para aparelhos elétricos ou várias máquinas. Um gerador é representado pela letra "G" no circuito.
1. Tipos de motores
Em geral, os motores se referem a dispositivos que convertem a força gerada pelo fluxo de corrente elétrica em um campo magnético em movimento rotacional e, em um sentido mais amplo, também em movimento linear.
Os motores podem ser classificados em duas categorias com base em sua fonte de energia: Motores de corrente contínua e motores de corrente alternada.
Eles também podem ser categorizados de forma geral com base em seus princípios de rotação, com algumas exceções para tipos especiais de motores.
(1) Motor CC
Motor escovado
O motor com escovas, amplamente utilizado, é geralmente chamado de motor CC. O rotor gira alternando a corrente por meio de eletrodos chamados "escovas" (no lado do estator) e um "comutador" (no lado da armadura).
Motor CC sem escova
Esse motor não requer escovas ou um comutador, mas usa funções de comutação, como transistores, para alternar as correntes e girar o motor.
Motor de passo
Esse motor opera de forma sincronizada com a potência de pulso e, portanto, também é chamado de motor de pulso. Sua característica é a operação de posicionamento fácil e precisa.
(2) Motor CA
Motor assíncrono
A corrente alternada faz com que o estator produza um campo magnético rotativo, o que faz com que o rotor produza uma corrente induzida e gire sob sua interação.
Motor síncrono
A CA cria um campo magnético rotativo, e o rotor com o campo magnético gira devido à atração. A taxa de rotação é sincronizada com a frequência de energia.
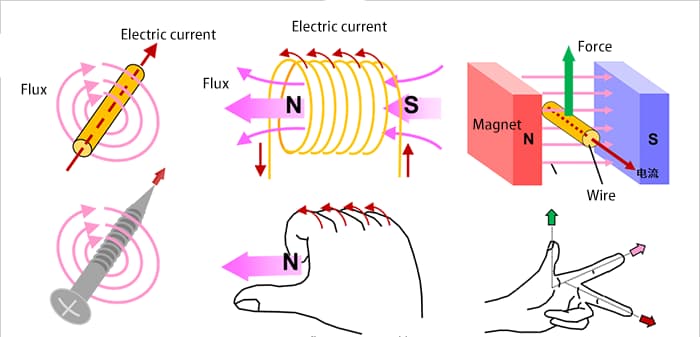
Sobre corrente elétrica, campos magnéticos e força
Em primeiro lugar, para facilitar a explicação dos princípios do motor, vamos revisar as leis básicas da corrente elétrica, dos campos magnéticos e da força. Embora isso possa trazer uma sensação de nostalgia, é fácil esquecer esse conhecimento se não usarmos componentes magnéticos com frequência.
Usaremos imagens e fórmulas para ilustrar isso.
Diagrama esquemático da rotação do motor
Quando o loop do fio é um retângulo, precisamos considerar a força que atua sobre a corrente.
A força F que atua nos lados a e c pode ser calculada pela seguinte fórmula:
Isso produz um torque sobre o eixo central.
Por exemplo, ao considerar o estado em que o ângulo de rotação é apenas θ, a força que atua em b e d em ângulos retos é sinθ. Portanto, o torque Ta no lado a pode ser expresso pela seguinte fórmula:
Da mesma forma, considerando o lado c, o torque dobra e gera um torque calculado pela fórmula a seguir:
Como a área do retângulo é S = h x l, substituindo-a na fórmula acima, obtemos os seguintes resultados:
Essa fórmula não se aplica apenas a retângulos, mas também a outras formas comuns, como círculos. Os motores utilizam esse princípio.
Motor padrão
Um motor padrão, frequentemente visto em itens do cotidiano, como brinquedos elétricos e barbeadores elétricos, é normalmente um motor de corrente contínua com escovas. Caracterizado por alta velocidade e baixo torque, ele requer apenas dois pinos para funcionar. Quando conectado aos terminais positivo e negativo de uma bateria, o motor começa a girar. Inverter a conexão fará com que o motor gire na direção oposta.
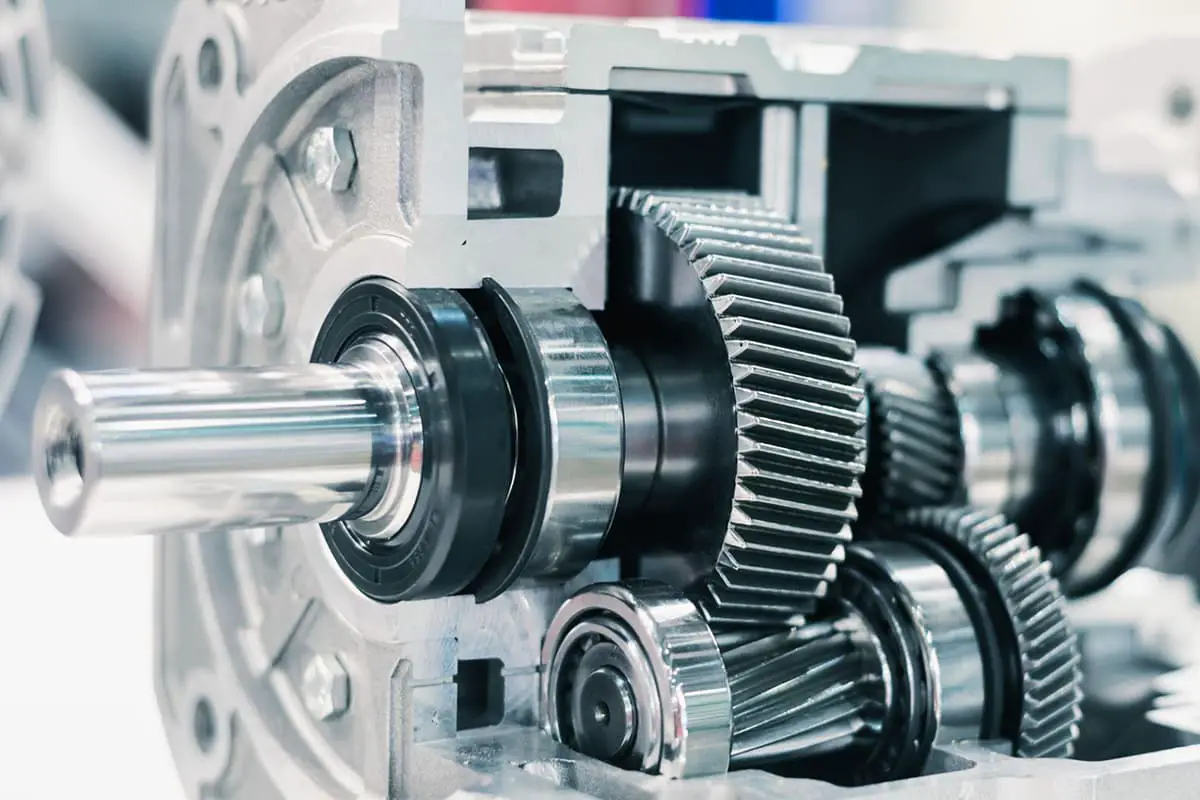
Motor de redução de engrenagem
Um motor de redução de engrenagem é um motor padrão equipado com uma caixa de engrenagens. Esse projeto reduz a velocidade de rotação e aumenta o torque, expandindo a gama de aplicações práticas do motor padrão.
Servo motor
Um servomotor consiste principalmente em uma carcaça, placa de circuito, motor sem núcleo, engrenagens e detector de posição. Ele opera recebendo um sinal do receptor para o servomotor. O CI integrado determina o sentido de rotação e aciona o motor sem núcleo para iniciar a rotação.
O movimento é transmitido ao braço oscilante por meio das engrenagens de redução, e o detector de posição envia simultaneamente sinais de retorno para verificar se a posição pretendida foi alcançada. O detector de posição é essencialmente um resistor variável, que altera os valores de resistência à medida que o servomotor gira. Ao detectar esses valores de resistência, o ângulo de rotação pode ser determinado.
Especificações fornecidas por fabricantes de servomotores Geralmente incluem dimensões (mm), torque (kg/cm), velocidade (seg/60°), tensão de teste (V) e peso (g). A unidade de torque é kg/cm, indicando quantos quilogramas podem ser levantados em um comprimento de braço oscilante de 1 cm.
Esse é o conceito de um braço de alavanca, portanto, quanto maior o braço, menor o torque. A unidade de velocidade é seg/60°, representando o tempo necessário para que o servomotor gire 60°.
Motor de passo
Um motor de passo é um elemento de controle de loop aberto que converte sinais de pulso elétrico em deslocamento angular ou linear. Em condições sem sobrecarga, a velocidade e a posição de parada do motor dependem exclusivamente da frequência e do número de sinais de pulso, independentemente das alterações de carga.
Quando um driver de passo recebe um sinal de pulso, ele aciona o motor de passo para girar um ângulo fixo, conhecido como "ângulo de passo", em uma direção predeterminada. Sua rotação progride em incrementos de ângulo fixo. O número de pulsos pode ser controlado para gerenciar o deslocamento angular, obtendo um posicionamento preciso. Da mesma forma, a frequência de pulso pode ser usada para controlar a velocidade de rotação e a aceleração do motor, obtendo-se, assim, a regulagem da velocidade.
Um servomotor, também conhecido como motor atuador, funciona como uma unidade executora em sistemas de controle automático, convertendo os sinais elétricos recebidos em um deslocamento angular ou velocidade angular de saída no eixo do motor.
Ele está disponível em duas categorias principais: servomotores de corrente contínua (CC) e de corrente alternada (CA). A principal característica desses motores é que não há fenômeno de auto-rotação quando a tensão do sinal é zero e a velocidade de rotação diminui uniformemente à medida que o torque aumenta.
Os servomotores dependem principalmente de pulsos para posicionamento. Essencialmente, o servomotor gira em um ângulo correspondente ao pulso para cada pulso recebido, obtendo assim o deslocamento. Como o próprio servomotor tem a capacidade de emitir pulsos, ele emite um número correspondente de pulsos para cada grau de rotação.
Isso forma um sistema responsivo ou de "loop fechado" com os pulsos recebidos. Dessa forma, o sistema sabe quantos pulsos foram enviados ao servomotor e quantos pulsos foram recebidos de volta. Consequentemente, ele pode controlar a rotação do motor com muita precisão, permitindo um posicionamento preciso de até 0,001 mm.
Os servomotores são amplamente divididos nas categorias servo CA e servo CC.
Os servomotores CA são divididos em servomotores CA assíncronos e servomotores CA síncronos.
Os servomotores CC são divididos em motores com escova e sem escova. Os motores com escovas são de baixo custo, de estrutura simples, produzem um alto torque de partida, têm uma ampla faixa de controle de velocidade e são fáceis de controlar. Eles exigem manutenção, mas ela é inconveniente (por exemplo, substituição de escovas), produzem interferência eletromagnética e têm requisitos ambientais específicos. Portanto, são adequados para aplicações industriais e civis gerais sensíveis ao custo.
2. Como os motores giram?
1)Os motores giram com a ajuda de ímãs e força magnética
Em torno de um ímã permanente com um eixo rotativo,
① Girar o ímã (para produzir um campo magnético rotativo),
De acordo com o princípio de que polos opostos se atraem e polos iguais se repelem, entre o polo N e o polo S,
③ O ímã com o eixo giratório irá girar.
Esse é o princípio básico da rotação do motor.
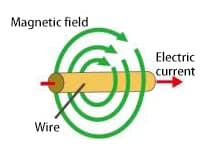
O fluxo de corrente através de um fio gera um campo magnético rotativo (força magnética) em torno dele, o que faz com que o ímã gire.
De fato, esse é o mesmo estado operacional descrito anteriormente.
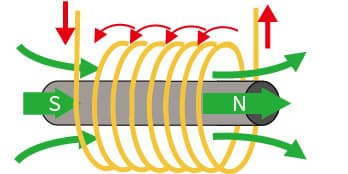
Além disso, se o fio for enrolado em uma bobina, as forças magnéticas são combinadas para formar um grande fluxo de campo magnético (fluxo magnético), que produz os polos N e S.
A inserção de um núcleo de ferro no fio em forma de bobina facilita a passagem das linhas do campo magnético e gera uma força magnética mais forte.
2)Motores rotativos práticos
Aqui, apresentaremos o método prático de usar CA trifásica e bobinas para produzir um campo magnético rotativo como um motor rotativo.
(CA trifásico é um sinal CA com uma diferença de fase de 120°).
O campo magnético combinado no estado acima ① corresponde à figura ① abaixo.
O campo magnético combinado no estado acima ② corresponde à figura ② abaixo.
O campo magnético combinado no estado acima ③ corresponde à figura ③ abaixo.
Como mencionado acima, a bobina enrolada em torno do núcleo de ferro é dividida em três fases, com a bobina de fase U, a bobina de fase V e a bobina de fase W dispostas em intervalos de 120°.
A bobina com alta tensão gera um polo N, enquanto a bobina com baixa tensão gera um polo S.
Cada fase muda de acordo com uma onda senoidal, de modo que a polaridade (polo N, polo S) e o campo magnético (força magnética) de cada bobina serão alterados.
Nesse momento, se observarmos a bobina que produz um polo N, ela muda sequencialmente de bobina de fase U para bobina de fase V para bobina de fase W para bobina de fase U, causando rotação.
3. Estrutura de motores pequenos
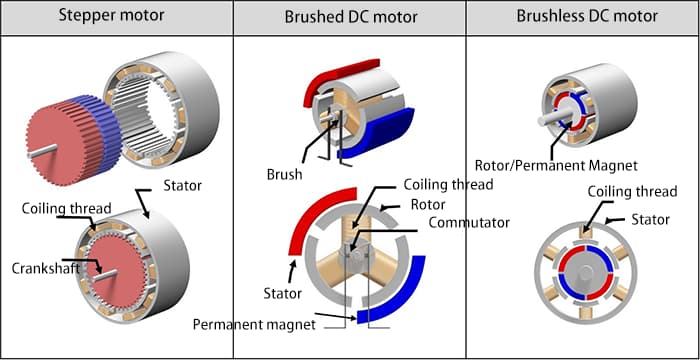
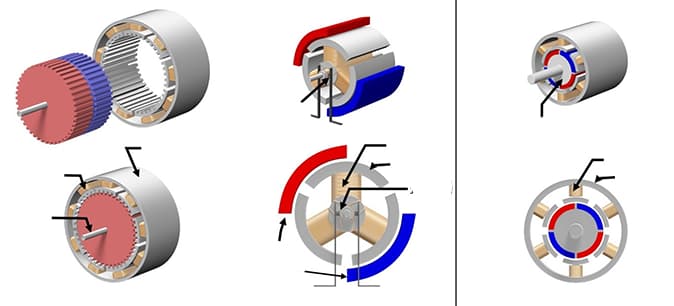
A figura a seguir mostra as estruturas aproximadas e as comparações de três tipos de motores: o motor de passo, o motor CC com escovas e o motor CC sem escovas.
Os componentes básicos desses motores são principalmente bobinas, ímãs e rotores, e eles são classificados como do tipo com bobina fixa e do tipo com ímã fixo devido aos seus diferentes tipos.
A seguir, apresentamos uma explicação estrutural relacionada ao diagrama de exemplo. Como pode haver outras estruturas se as dividirmos mais detalhadamente, entenda que este artigo descreve a estrutura geral.
No motor de passo mostrado aqui, a bobina é fixa no lado externo e o ímã gira no lado interno.
No motor CC com escovas mostrado aqui, o ímã é fixado no lado externo e a bobina gira no lado interno. As escovas e o comutador são responsáveis por fornecer energia à bobina e mudar a direção da corrente.
No motor sem escovas mostrado aqui, a bobina é fixa no lado externo e o ímã gira no lado interno.
Devido aos diferentes tipos de motor, mesmo que os componentes básicos sejam os mesmos, a estrutura pode ser diferente. A explicação detalhada será dada em cada seção.
4. Motor escovado
Estrutura do motor com escova
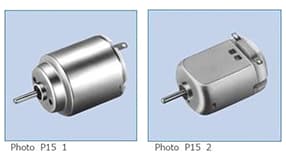
Abaixo é mostrada a aparência de um motor CC escovado usado com frequência em modelos, bem como um diagrama explodido de um motor típico de dois polos (2 ímãs) e três ranhuras (3 bobinas). Muitas pessoas podem ter experiência em desmontar motores e remover ímãs.
Como pode ser visto, o ímã permanente de um motor CC com escovas é fixo, e as bobinas podem girar em torno do centro interno do motor. O lado fixo é chamado de "estator", enquanto o lado giratório é chamado de "rotor".
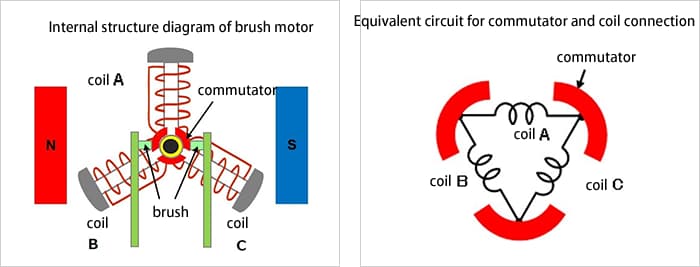
A seguir, um diagrama esquemático que representa o conceito da estrutura do motor.
Há três comutadores (placas de metal curvas para alternar a corrente) na periferia do eixo central rotativo. Para evitar que entrem em contato uns com os outros, os comutadores são dispostos em intervalos de 120 graus (360 graus ÷ 3). Os comutadores giram junto com a rotação do eixo.
Cada comutador é conectado a uma extremidade da bobina e a outra extremidade da bobina, e os três comutadores e as três bobinas formam uma rede de circuito como um todo (em forma de anel).
Duas escovas são fixadas a 0° e 180° para entrar em contato com os comutadores. A fonte de alimentação CC externa é conectada às escovas, e a corrente flui ao longo do caminho da escova → comutador → bobina → escova.
Princípio de operação de um motor com escova.
① Rotação no sentido anti-horário a partir do estado inicial
No estado inicial, a bobina A está na parte superior e a fonte de alimentação está conectada às escovas com os lados esquerdo (+) e direito (-) definidos. Uma grande corrente flui da escova esquerda através do comutador para a bobina A, e o lado superior (externo) da bobina A se torna uma estrutura de polo S.
Como metade da corrente que flui pela bobina A a partir da escova esquerda em direção às bobinas B e C está na direção oposta à da bobina A, o lado externo das bobinas B e C se torna um polo N mais fraco (representado por letras menores no diagrama).
Os campos magnéticos gerados nessas bobinas e a repulsão e atração entre os ímãs fazem com que a bobina gire no sentido anti-horário.
② Rotação adicional no sentido anti-horário
Supondo que a bobina A esteja em um estado de rotação de 30 graus no sentido anti-horário, a escova direita entra em contato com dois comutadores.
A corrente na bobina A continua a fluir da escova esquerda para a escova direita, e o lado externo da bobina A continua sendo um polo S.
A mesma corrente da bobina A flui pela bobina B, e o lado externo da bobina B se torna um polo N mais forte.
Como as duas extremidades da bobina C estão em curto-circuito com as escovas, nenhuma corrente flui e nenhum campo magnético é gerado.
Mesmo nesse caso, a bobina é submetida a uma força de rotação no sentido anti-horário.
De ③ a ④, a bobina superior continua a ser submetida a uma força para a esquerda e a bobina inferior continua a ser submetida a uma força para a direita, continuando a girar no sentido anti-horário.
Cada vez que a bobina gira 30 graus para os estados ③ e ④, o lado externo da bobina se torna um polo S quando a bobina está localizada acima do eixo horizontal central e um polo N quando a bobina está localizada abaixo dele, realizando esse movimento repetidamente.
Em outras palavras, a bobina superior recebe repetidamente uma força para a esquerda e a bobina inferior recebe repetidamente uma força para a direita (ambas no sentido anti-horário). Isso faz com que o rotor gire continuamente no sentido anti-horário.
Se a fonte de alimentação estiver conectada à escova esquerda (-) e à escova direita (+) opostas, a bobina gera um campo magnético na direção oposta e a direção da força aplicada à bobina é invertida, causando a rotação no sentido horário.
Além disso, quando a fonte de alimentação é desconectada, o rotor do motor com escovas para de girar porque não há campo magnético para mantê-lo girando.
5. Motor sem escova trifásico de onda completa
Aparência e estrutura do motor sem escova trifásico de onda completa
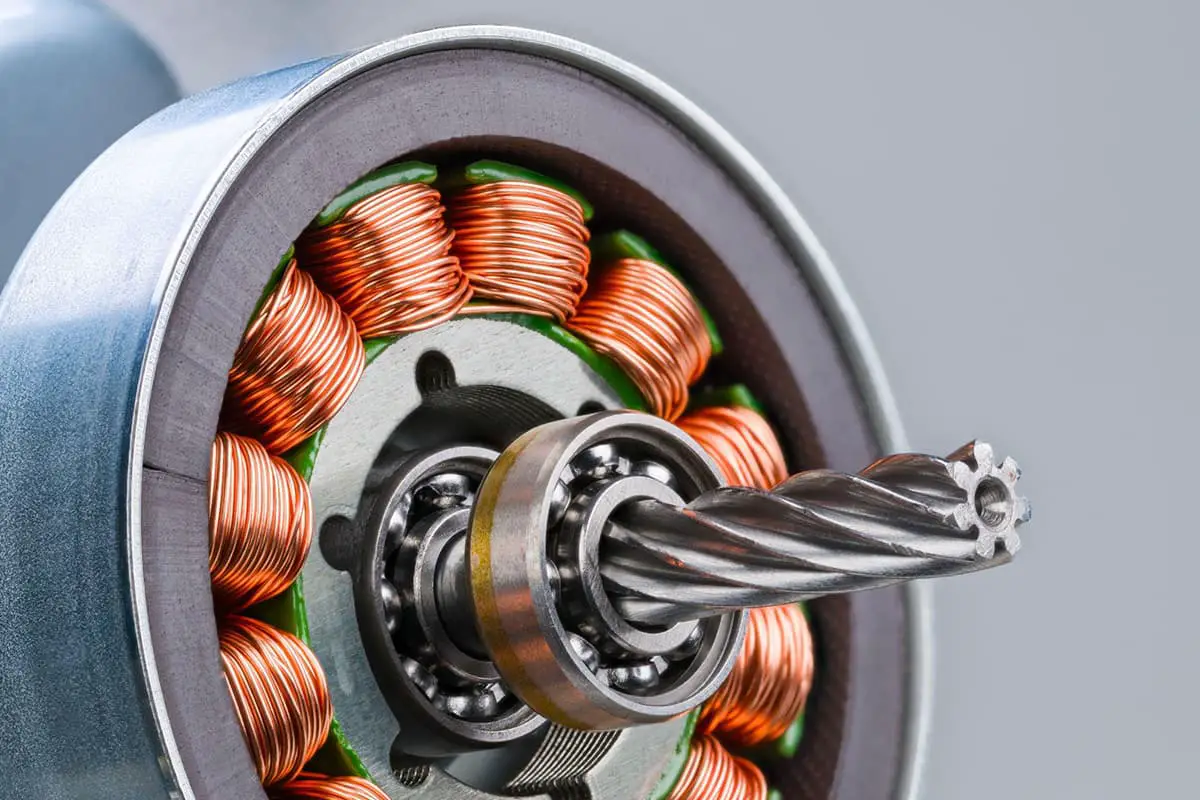
A figura a seguir mostra um exemplo da aparência e da estrutura de um motor sem escovas.
À esquerda está um exemplo de um motor de eixo para girar discos em um dispositivo de reprodução de discos. Há um total de nove bobinas, que consistem em três fases vezes três.
À direita está um exemplo de um motor de fuso para um dispositivo FDD, que tem 12 bobinas (três fases vezes quatro). As bobinas são fixadas na placa de circuito e enroladas em um núcleo de ferro.
O componente em forma de disco à direita da bobina é um rotor de ímã permanente. A borda externa é feita de um ímã permanente, e o eixo do rotor é inserido no centro da bobina e cobre parte dela. O ímã permanente gira em torno da borda externa da bobina.
O diagrama da estrutura interna de um motor sem escovas trifásico de onda completa e o circuito equivalente para conexões de bobina.
A seguir, são apresentados diagramas simplificados da estrutura interna e do circuito equivalente para conexões de bobina.
O diagrama simplificado mostra um motor de 2 polos (2 ímãs) e 3 ranhuras (3 bobinas) com uma estrutura simples. Ele é semelhante a um motor de escovas estrutura do motor com o mesmo número de polos e ranhuras, mas o lado da bobina é fixo, enquanto os ímãs podem girar. Obviamente, não há escovas.
Nesse caso, as bobinas são conectadas em uma configuração em forma de Y, e os componentes semicondutores são usados para fornecer corrente às bobinas. O fluxo de corrente é controlado com base na posição dos ímãs rotativos.
Neste exemplo, os elementos Hall são usados para detectar a posição dos ímãs. Os elementos Hall são colocados entre as bobinas e detectam a tensão gerada pela intensidade do campo magnético, que é usada como informação de posição. Na imagem do motor do eixo do dispositivo FDD fornecida anteriormente, os elementos Hall também podem ser vistos entre as bobinas para detecção de posição (acima das bobinas).
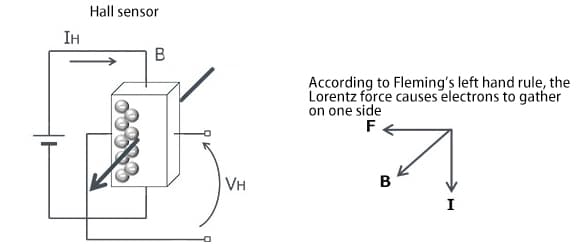
Os elementos Hall são sensores magnéticos bem conhecidos que convertem o tamanho do campo magnético em tamanho da tensão e representam a direção do campo magnético com tensão positiva ou negativa.
A seguir, um diagrama esquemático que ilustra o efeito Hall.
O elemento Hall utiliza o fenômeno de que "quando uma corrente IH passa por um semicondutor e um fluxo magnético B passa perpendicularmente à corrente, uma tensão VH é gerada na direção perpendicular à corrente e ao campo magnético". O físico americano Edwin Herbert Hall descobriu esse fenômeno e o chamou de "efeito Hall". A tensão VH gerada é expressa pela seguinte fórmula:
VH = (KH / d)・IH・B
※KH: coeficiente Hall, d: espessura da superfície de penetração do fluxo magnético
Conforme mostrado na fórmula, quanto maior a corrente, maior a tensão. Essa característica é comumente usada para detectar a posição do rotor (ímã).
Princípio de rotação de motores sem escovas trifásicos de onda completa
O princípio de rotação de um motor sem escovas será explicado nas etapas 1 a 6. Para facilitar a compreensão, o ímã permanente foi simplificado de uma forma circular para uma forma retangular.
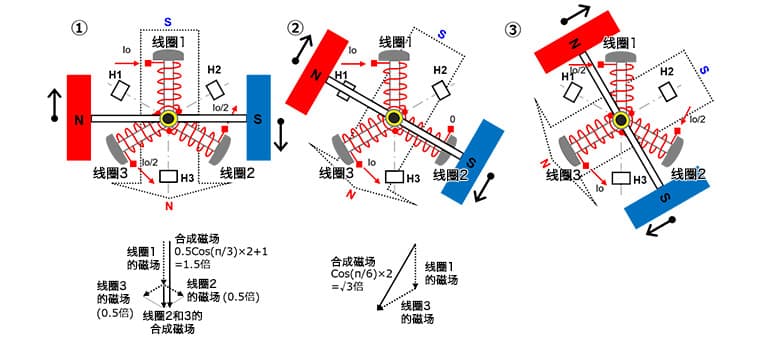
① Em um sistema de bobina trifásico, a bobina 1 é fixada na posição de 12 horas, a bobina 2 é fixada na posição de 4 horas e a bobina 3 é fixada na posição de 8 horas no mostrador do relógio. Um ímã permanente de 2 polos com o polo N à esquerda e o polo S à direita é capaz de girar.
Passe uma corrente Io pela bobina 1 para produzir um campo magnético de polo S na parte externa da bobina. Passe uma corrente de Io/2 pelas bobinas 2 e 3 para produzir um campo magnético de polo N na parte externa da bobina.
Quando os campos magnéticos das bobinas 2 e 3 são combinados vetorialmente, é produzido um campo magnético de polo N apontando para baixo. Esse campo magnético é 0,5 vez o campo magnético produzido pela corrente Io que passa por uma única bobina e, quando adicionado ao campo magnético da bobina 1, torna-se 1,5 vez mais forte. Isso produz um campo magnético combinado perpendicular ao ímã permanente, que gera torque máximo e faz com que o ímã permanente gire no sentido horário.
Como a corrente através da bobina 2 é reduzida e a corrente através da bobina 3 é aumentada com base na posição de rotação, o campo magnético combinado também gira no sentido horário, fazendo com que o ímã permanente continue a girar.
② Em um estado rotacionado de 30 graus, uma corrente Io passa pela bobina 1, tornando a corrente na bobina 2 zero e fazendo com que a corrente Io flua para fora da bobina 3.
A parte externa da bobina 1 se torna um polo S e a parte externa da bobina 3 se torna um polo N. Quando combinados vetorialmente, o campo magnético produzido é √3 (≈1,72) vezes mais forte do que o campo magnético produzido pela corrente Io que passa por uma única bobina. Isso também produz um campo magnético combinado perpendicular ao ímã permanente, que gira no sentido horário.
À medida que a posição de rotação muda, a corrente que flui para a bobina 1 é reduzida, a corrente que flui para a bobina 2 começa do zero e aumenta, e a corrente que sai da bobina 3 aumenta para Io. Como resultado, o campo magnético combinado também gira no sentido horário, fazendo com que o ímã permanente continue a girar.
※ Supondo que cada corrente de fase seja uma onda senoidal, o valor da corrente aqui é Io × sin(π⁄3) = Io × √3⁄2. Por meio da combinação vetorial dos campos magnéticos, a magnitude do campo magnético total é 1,5 vez o campo magnético produzido por uma única bobina.
Quando cada corrente de fase é uma onda senoidal, independentemente da posição do ímã permanente, a magnitude do campo magnético combinado vetorialmente é sempre 1,5 vezes o campo magnético produzido por uma única bobina, e o campo magnético é perpendicular ao campo magnético do ímã permanente em um ângulo de 90 graus.
③ Em uma rotação contínua de 30 graus, uma corrente de Io/2 flui pela bobina 1, uma corrente de Io/2 flui pela bobina 2 e uma corrente de Io flui pela bobina 3.
A parte externa da bobina 1 se torna um polo S, a parte externa da bobina 2 também se torna um polo S e a parte externa da bobina 3 se torna um polo N. Quando combinados vetorialmente, o campo magnético produzido é 1,5 vezes o campo magnético produzido quando uma corrente de Io passa por uma única bobina (o mesmo que na etapa 1). Isso também produz um campo magnético combinado perpendicular ao campo magnético do ímã permanente em um ângulo de 90 graus e gira no sentido horário.
④-⑥
Continue girando da mesma forma que nas etapas 1 a 3.
Dessa forma, se a corrente que flui para as bobinas for continuamente alternada com base na posição do ímã permanente, o ímã permanente girará em uma direção fixa. Da mesma forma, se a corrente fluir na direção oposta e a direção do campo magnético combinado for invertida, a rotação será no sentido anti-horário.
O diagrama a seguir mostra a corrente que flui em cada bobina para cada etapa de 1 a 6.
Com a explicação acima, a relação entre as mudanças atuais e a rotação deve ser entendida agora.
6. Motor de passo
Um motor de passo é um tipo de motor que pode ser controlado com precisão em termos de ângulo de rotação e velocidade por meio da sincronização com um sinal de pulso. Os motores de passo também são conhecidos como "motores de pulso".
Devido à sua capacidade de obter um posicionamento preciso sem o uso de sensores de posição e apenas com controle de malha aberta, os motores de passo são amplamente usados em equipamentos que exigem posicionamento.
Estrutura do motor de passo (bipolar de duas fases)
As imagens a seguir, da esquerda para a direita, mostram exemplos da aparência de um motor de passo, um diagrama esquemático de sua estrutura interna e um diagrama conceitual de sua estrutura.
No exemplo da aparência, são mostrados os tipos HB (híbrido) e PM (ímã permanente) de motores de passo. O diagrama esquemático no meio também mostra a estrutura dos tipos HB e PM.
Um motor de passo tem uma estrutura na qual as bobinas são fixas e o ímã permanente gira. O diagrama conceitual da estrutura interna do motor de passo à direita é um exemplo de um motor PM com bobinas bifásicas (dois conjuntos).
No exemplo da estrutura básica do motor de passo, as bobinas estão dispostas do lado de fora e o ímã permanente está disposto do lado de dentro. Além do tipo bifásico, há tipos com mais fases, como o trifásico e o pentafásico.
Alguns motores de passo têm estruturas diferentes, mas, para explicar o princípio básico de funcionamento dos motores de passo, este artigo apresenta o motor de passo com a estrutura básica de bobinas fixas e ímãs permanentes rotativos.
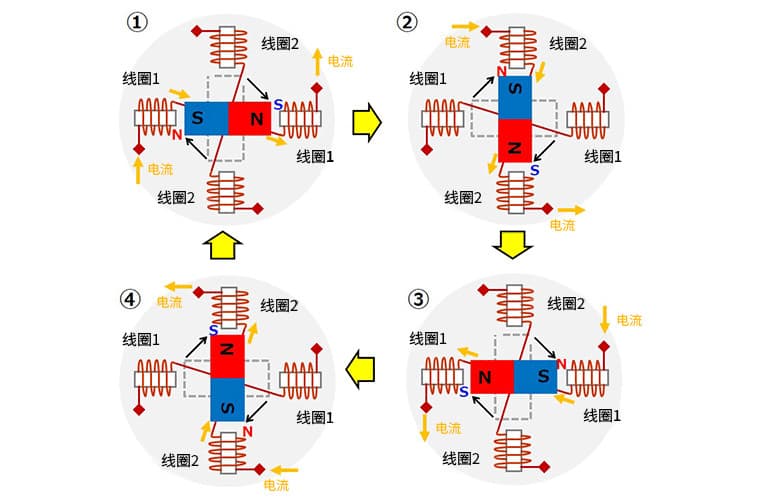
O diagrama a seguir é usado para explicar o princípio básico de funcionamento do motor de passo. Este é um exemplo de excitação de cada fase (um conjunto de bobinas) das bobinas bipolares bifásicas mostradas na imagem anterior, assumindo uma mudança de estado de ① para ④. As bobinas são compostas pelas bobinas 1 e 2, e a seta de corrente indica a direção do fluxo de corrente.
①
A corrente elétrica flui do lado esquerdo da bobina 1 e sai do lado direito.
Não permita que a corrente elétrica flua pela bobina 2.
Nesse ponto, a parte interna da bobina esquerda 1 se torna norte, e a parte interna da bobina direita 1 se torna sul.
Como resultado, o ímã permanente do meio é atraído pelo campo magnético da bobina 1 e para em um estado em que o lado esquerdo está para o sul e o lado direito para o norte.
②
Interrompa a corrente na bobina 1 e permita que a corrente flua da parte superior da bobina 2 e saia pela parte inferior.
A parte interna da bobina superior 2 fica ao norte, e a parte interna da bobina inferior 2 fica ao sul.
O ímã permanente é atraído por seu campo magnético, gira 90° no sentido horário e para.
③
Interrompa a corrente na bobina 2 e permita que a corrente flua do lado direito da bobina 1 e saia pelo lado esquerdo.
A parte interna da bobina esquerda 1 se torna o sul, e a parte interna da bobina direita 1 se torna o norte.
O ímã permanente é atraído por seu campo magnético, gira mais 90° no sentido horário e para.
④
Interrompa a corrente na bobina 1 e permita que a corrente flua da parte inferior da bobina 2 e saia pela parte superior.
A parte interna da bobina superior 2 fica ao sul, e a parte interna da bobina inferior 2 fica ao norte.
O ímã permanente é atraído por seu campo magnético, gira mais 90° no sentido horário e para.
Ao alternar a corrente que flui pelas bobinas na ordem das etapas ① a ④ usando circuitos eletrônicos, o motor de passo pode ser girado. Neste exemplo, cada ação de comutação girará o motor de passo em 90°.
Além disso, com o fluxo contínuo de corrente por uma bobina específica, o motor de passo pode manter sua posição de parada e ter torque de retenção. Vale a pena mencionar que a inversão da ordem da corrente que flui pelas bobinas pode fazer com que o motor de passo gire na direção oposta.
Como fundador do MachineMFG, dediquei mais de uma década de minha carreira ao setor de metalurgia. Minha vasta experiência permitiu que eu me tornasse um especialista nas áreas de fabricação de chapas metálicas, usinagem, engenharia mecânica e máquinas-ferramentas para metais. Estou sempre pensando, lendo e escrevendo sobre esses assuntos, esforçando-me constantemente para permanecer na vanguarda do meu campo. Permita que meu conhecimento e experiência sejam um trunfo para sua empresa.
Você já se perguntou o que mantém um motor elétrico funcionando sem problemas e sem superaquecimento? Compreender as temperaturas seguras de operação dos motores é fundamental para sua longevidade e desempenho. Neste artigo,...
No mundo acelerado da automação industrial, os servomotores são os heróis anônimos que impulsionam a precisão e a eficiência. Mas, com inúmeros fabricantes disputando a atenção, como saber quais são...
Você já se perguntou como as escavadeiras e outras máquinas pesadas realizam suas poderosas tarefas? Neste artigo, exploraremos as diferenças fascinantes entre bombas e motores hidráulicos. Você aprenderá como...
Você já se perguntou como as máquinas conseguem movimentos precisos? Este blog mergulha no fascinante mundo dos modos de controle de servomotores. Do controle por pulso ao analógico, exploraremos como cada método funciona...
Você já se perguntou como os trens podem flutuar sobre os trilhos ou como os robôs conseguem realizar movimentos precisos? Este artigo revela o fascinante mundo dos motores lineares, explicando seus princípios, tipos e vantagens exclusivas....
Você já se perguntou como escolher o motor perfeito para o seu projeto? O segredo está em entender os tipos de motores - CC, assíncrono e síncrono - e suas vantagens exclusivas. Este artigo detalha...
Por que os rolamentos do motor esquentam tanto e o que pode ser feito a respeito? Este artigo analisa as causas da geração de calor nos rolamentos do motor, desde cargas excessivas e...
O que acontece quando o equilíbrio magnético de um motor está desativado? A tração magnética unilateral ocorre devido a um espaço de ar desequilibrado nos motores, causando forças desiguais que tensionam os rolamentos do motor. Este artigo...
Como os rolamentos afetam a eficiência e a durabilidade dos motores de engrenagens helicoidais? Este artigo se aprofunda na função crítica dos rolamentos, discutindo sua seleção e disposição, e como eles lidam com...