Caso Um
Dado:
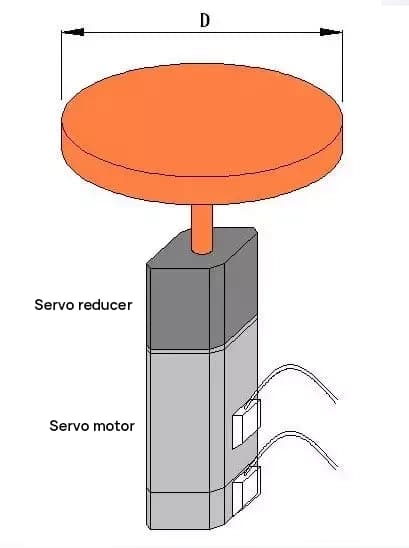
- Massa do disco M=50 kg
- Diâmetro do disco D=500 mm
- Velocidade máxima do disco 60 rpm
Selecione o servomotor e a engrenagem de redução, com o esquema de componentes a seguir:
Cálculo do momento de inércia para a rotação do disco
JL = MD2/8 = 50 * 502 / 8 = 15625 [kg-cm2]
Considerando uma relação de redução de engrenagem de 1:R, a inércia da carga refletida no eixo do servomotor é 15625/R2.
De acordo com o princípio de que a inércia da carga deve ser menor que três vezes a inércia do rotor, JM do motor,
Se for selecionado um motor de 400 W, JM = 0,277 [kg-cm2],
então: 15625 / R2 < 3*0.277, R2 > 18803, R > 137,
a velocidade de saída = 3000/137 = 22 [rpm],
que não atende ao requisito.
Se for selecionado um motor de 500 W, JM = 8,17 [kg-cm2],
então: 15625 / R2 < 3*8.17, R2 > 637, R > 25,
a velocidade de saída = 2000/25 = 80 [rpm],
que satisfaz o requisito.
Esse tipo de transmissão tem resistência mínima, portanto, os cálculos de torque são ignorados.
Caso dois
Dado:
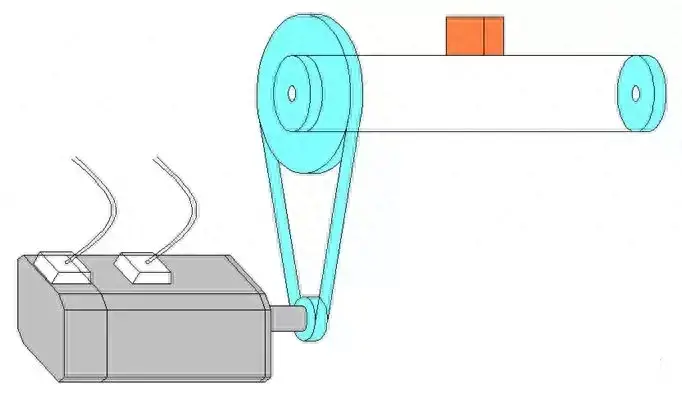
- Peso da carga M = 50 kg
- Correia síncrona diâmetro da roda D = 120 mm
- Taxa de redução R1 = 10, R2 = 2
- Coeficiente de atrito entre a carga e a mesa da máquina µ = 0,6
- Velocidade máxima de movimento da carga: 30 m/min
- Tempo para a carga acelerar do repouso até a velocidade máxima: 200 ms
Ignorando o peso de cada roda da correia transportadora,
Qual é o requisito mínimo de potência para um motor acionar essa carga?
O diagrama esquemático do componente é o seguinte:
1. Cálculo da inércia da carga refletida no eixo do motor:
JL = M * D2 / 4 / R12
= 50 * 144 / 4 / 100
= 18 [kg-cm2]
De acordo com o princípio de que a inércia da carga deve ser menor que três vezes a inércia do rotor do motor (JM):
JM > 6 [kg-cm2]
2. Calcular o torque necessário para acionar a carga do motor:
Torque necessário para superar o atrito:
Tf = M * g * µ * (D / 2) / R2 / R1
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10
= 0,882 [N-m]
Torque necessário para a aceleração:
Ta = M * a * (D / 2) / R2 / R1
= 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10
= 0,375 [N-m]
O torque nominal do servomotor deve ser maior que Tfe o torque máximo deve ser maior que Tf + Ta.
3. Cálculo da velocidade necessária do motor:
N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10
= 796 [rpm]
Caso três
Dado:
- Peso da carga M = 200 kg
- Passo do parafuso PB = 20 mm
- Diâmetro do parafuso DB = 50 mm
- Peso do parafuso MB = 40 kg
- Coeficiente de atrito µ = 0,2
- Eficiência mecânica η = 0,9
- Velocidade de movimentação da carga V = 30 m/min
- Tempo total de movimento t = 1,4 s
- Tempo de aceleração e desaceleração t1 = t3 = 0.2 s
- Tempo de repouso t4 = 0.3 s
Selecione o servomotor com a potência mínima que atenda aos requisitos de carga,
O diagrama de componentes é o seguinte:
1. Cálculo da inércia da carga convertida para o eixo do motor
Inércia de carga do peso convertida para o eixo do motor
JW = M * (PB / 2π)²
= 200 * (2 / 6.28)²
= 20,29 [kg-cm²]
A inércia rotacional do parafuso
JB = MB * DB² / 8
= 40 * 25 / 8
= 125 [kg-cm²]
Inércia total da carga
JL = JW + JB = 145,29 [kg-cm²]
2. Cálculo da velocidade do motor
Velocidade necessária do motor
N = V / PB
= 30 / 0.02
= 1500 [rpm]
3. Cálculo do torque necessário para acionar a carga do motor
O torque necessário para superar o atrito
Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9
= 1,387 [N-m]
Torque necessário quando o peso está sendo acelerado
TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9
= 1,769 [N-m]
Torque necessário quando o parafuso está acelerando
TA2 = JB * α / η
= JB * (N * 2π / 60 / t1) / η
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9
= 10,903 [N-m]
Torque total necessário para a aceleração
TA = TA1 + TA2 = 12,672 [N-m]
4. Seleção do servomotor
Torque nominal do servomotor
T > Tf e T > Trms
Torque máximo do servomotor
Tmáximo > Tf + TA
Por fim, foi selecionado o motor ECMA-E31820ES.