Braços robóticos para estamparia: o guia definitivo
Como as fábricas podem acompanhar as demandas incansáveis da produção moderna? Os braços robóticos de estampagem oferecem uma solução atraente, transformando a produção com eficiência e precisão inigualáveis. Este artigo analisa sua função na automação de tarefas, no aumento da produção e na redução de erros. Os leitores descobrirão os principais benefícios da integração desses braços robóticos em suas operações, desde a relação custo-benefício até as melhorias na segurança. Mergulhe de cabeça para entender como essas maravilhas tecnológicas estão moldando o futuro da automação industrial.
O braço robótico de estampagem é um componente crucial da fabricação inteligente.
As matrizes de estampagem automática desempenham um papel fundamental no processo de estampagem. Sem matrizes adequadas, é um desafio realizar a produção de estampagem em massa e, sem matrizes avançadas, a tecnologia de estampagem avançada não pode ser implementada.
Os três elementos que compõem o processamento de estampagem são o processo e a matriz de estampagem, o equipamento de estampagem e os materiais de estampagem. Somente quando eles são combinados é que as peças de estampagem podem ser produzidas. O custo de um robô de estampagem é relativamente baixo e ele pode se pagar em meio ano.
O preço de um braço robótico varia de 60.000 a 100.000 yuans, dependendo do número de eixos e da marca. Embora o custo inicial possa ser alto, ele equivale ao salário de vários funcionários se calculado por hora e mês.
Além disso, a eficiência operacional de um braço robótico de estampagem é significativamente maior, e a taxa de erro é muito menor em comparação com a operação manual.
O crescimento do setor de robótica apresenta novas oportunidades para o setor de manufatura inteligente de ponta da China.
Devido à sua alta eficiência de produção, baixo custo de processamento e qualidade consistente, produção de estamparia é fundamental para os setores automotivo, de eletrodomésticos, eletrônicos e outros.
O braço robótico de estampagem é um objeto de controle comumente encontrado no campo da automação industrial.
As modernas oficinas de estamparia geralmente empregam braços robóticos de estamparia para aumentar a eficiência da produção e realizar tarefas desafiadoras ou perigosas que, de outra forma, seriam executadas por trabalhadores.
Um braço robótico de estampagem pode executar várias tarefas, como movimentação de objetos, montagem, corte, pulverização e muito mais.
O que é um carimbo braço robótico?
O braço robótico de estampagem é um tipo de equipamento auxiliar de produção de precisão que substitui as operações manuais por dispositivos inteligentes.
Ele apresenta uma interface homem-máquina e um Controle PLC O sistema de controle de qualidade do carimbo facilita a configuração da velocidade de alimentação e da distância do passo. Ele também permite que o usuário defina a saída do alvo de estampagem e exibe a quantidade atual de estampagem.
O braço robótico de estamparia também tem uma função de alerta anormal, simplificando a manutenção. Ele integra um braço robótico, um mecanismo de alimentação, um mecanismo de recebimento e um rack de empilhamento.
Com o dispositivo de alimentação totalmente automático e o mecanismo de alimentação auxiliar, o braço robótico de estampagem pode realizar estampagem, retirada e alimentação totalmente automáticas, substituindo com eficácia as operações manuais.
Ele também pode adotar a alimentação por servo duplo para aumentar a precisão, a eficiência e a facilidade de ajuste da velocidade de alimentação e da distância do passo.
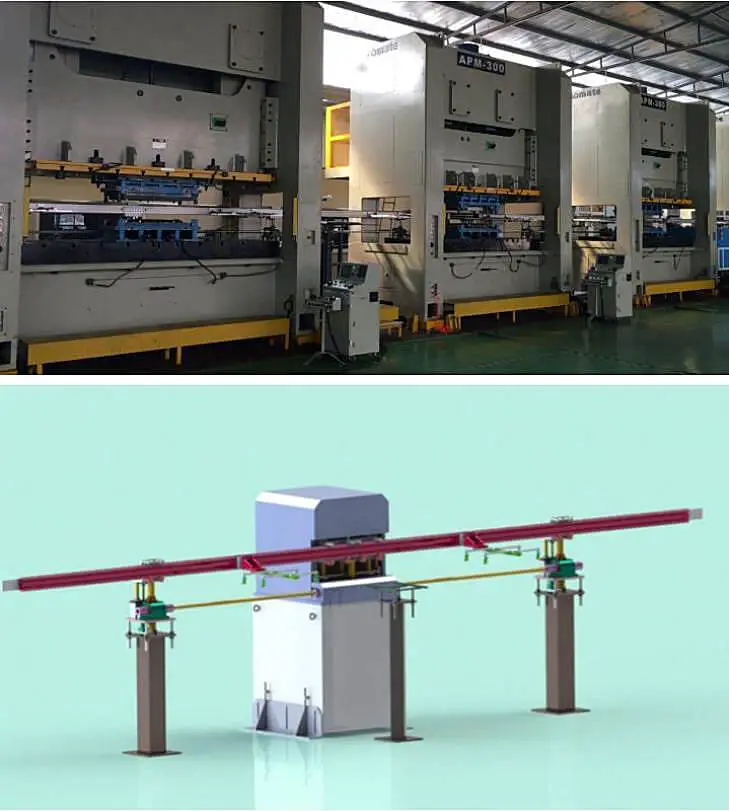
O braço robótico de estamparia é amplamente utilizado para uma variedade de grandes chapa metálica peças de estampagem, peças de estiramento, operações de estação única e linhas de produção automáticas.
Características da estampagem braço robótico
Todo o braço robótico da prensa foi projetado e fabricado para atender aos padrões CE, garantindo alta eficiência de transferência. O acionamento principal é alimentado por um servomotor importado, controlado por um microcomputador e operado por meio de uma interface homem-máquina.
O modo de alimentação do braço robótico de estampagem permite o uso de um alimentador de ar ou de um alimentador de rolos NC com material em bobina e um rack de empilhamento duplo com material em folha. O número de mesas de punção, mesas de rotação e outros equipamentos que exigem ação contínua podem ser facilmente selecionados.
Para acomodar diferentes peças de trabalho, o braço robótico de estampagem é equipado com várias opções de preensão, incluindo ventosas a vácuo, sucção eletromagnética de ferro e fixações pneumáticas, selecionadas com base nas características das peças (como material e características estruturais).
O braço robótico de estampagem apresenta um design modular funcional, com módulos funcionais especializados criados com base nos requisitos exclusivos do processo de estampagem de diferentes setores. Isso resulta em um sistema estável e de fácil combinação.
Utilizando uma combinação de tecnologia alemã e experiência local, o braço robótico de estampagem é projetado para atender às necessidades específicas dos clientes, resultando em um sistema de estampagem ideal.
Os principais componentes do braço robótico de estampagem, incluindo o computador de controle, são todos de marcas europeias de renome e têm reputação de qualidade estável e confiável, ajudando a reduzir os custos de manutenção do cliente.
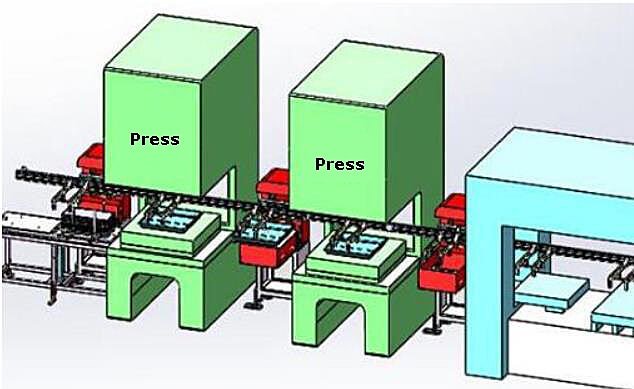
O braço robótico da prensa, o equipamento de estampagem e a matriz são todos integrados em um sistema de estampagem profissional e automático, permitindo a automação total do processo de produção.
O braço robótico de estampagem reduz os custos de mão de obra e de material e economiza espaço físico.
O braço robótico da prensa é equipado com um sistema de controle computadorizado, que permite a configuração de parâmetros, velocidade de alimentação, configurações de etapas, saída do alvo de estampagem e exibe a quantidade atual de estampagem. Ele também inclui uma função de aviso de falha e simplifica a manutenção.
Tipos de punção braço robótico
O uso de um braço robótico para a troca de ferramentas é o mais popular devido à sua flexibilidade na troca de ferramentas e à capacidade de reduzir o tempo de troca de ferramentas.
Na troca automática de ferramentas Máquina CNC ferramentas, há várias formas e tipos de braços robóticos usados.
O braço desse braço robótico é capaz de girar em vários ângulos para facilitar a troca automática de ferramentas.
No entanto, ele apresenta apenas um fixação garra.
O tempo de troca de ferramenta é prolongado, pois a garra de fixação é responsável por carregar e descarregar a ferramenta, esteja ela localizada no magazine de ferramentas ou no fuso.
2. Balanço de garra dupla de braço único braço robótico
O braço desse tipo de braço robótico apresenta duas garras de fixação, cada uma com uma função específica.
Uma das garras é a única responsável por remover a ferramenta usada do fuso e devolvê-la ao magazine de ferramentas, enquanto a outra é dedicada a recuperar a nova ferramenta do magazine e colocá-la no fuso.
Como resultado, o tempo de troca de ferramenta é reduzido em comparação com o braço robótico rotativo de garra única mencionado anteriormente.
3. Garra dupla rotativa de braço único braço robótico
Esse tipo de braço robótico apresenta uma garra de fixação em ambas as extremidades do braço.
Essas duas garras são capazes de segurar ferramentas simultaneamente, tanto no magazine de ferramentas quanto no fuso.
Com uma rotação de 180 graus, o NC ferramentas de perfuração são devolvidas ao magazine de ferramentas e instaladas no fuso ao mesmo tempo, o que reduz o tempo de troca de ferramentas em comparação com os braços robóticos de braço único mencionados anteriormente. Essa é a forma mais amplamente utilizada.
4. Duplo braço robótico
Isso Torre CNC O braço robótico de punção é equivalente a dois braços robóticos de garra única que trabalham juntos para a troca automática de ferramentas. O primeiro braço robótico remove a "faca antiga" do fuso e a devolve ao magazine de ferramentas. O segundo braço recupera uma "nova ferramenta" do magazine e a instala no eixo da máquina.
5. Os dois braços dessa máquina de cardar podem se mover para frente e para trás e se cruzar em um determinado ângulo.
Um braço recupera a "faca antiga" do fuso e a devolve ao magazine de ferramentas, enquanto o outro braço recupera a "faca nova" do magazine de ferramentas e a instala no fuso. O braço robótico inteiro pode se mover em linha reta ao longo de um trilho-guia ou girar em torno de um eixo rotativo para facilitar a transferência de ferramentas entre o magazine de ferramentas e o fuso.
6. Fixação da face final do braço duplo braço robótico
Esse tipo de braço robótico difere dos anteriores em seu mecanismo de fixação da ferramenta. Enquanto os modelos anteriores de braços robóticos prendiam a ferramenta pela circunferência externa do cabo da ferramenta, esse tipo de braço prende as duas faces finais do cabo da ferramenta.
Três componentes principais do braço robótico de punção
Os principais componentes básicos do braço robótico de perfuração referem-se às unidades de componentes essenciais que compõem o braço robótico de perfuração. sistema de transmissãoO sistema de controle e o sistema de interação homem-computador do braço robótico. Esses componentes desempenham um papel fundamental na operação do maquinário de perfuração e são caracterizados por sua universalidade e design modular.
Os componentes são divididos basicamente em três partes: um redutor de alta precisão, um servomotor e um driver CA/CC de alto desempenho e um controlador de robô de alto desempenho.
1. Redutor
Os redutores são os principais componentes dos braços robóticos de punção. Atualmente, há principalmente dois tipos em uso: o redutor de engrenagem harmônica e o redutor RV. Esses redutores são aplicados às juntas da base e do braço do braço robótico de puncionamento.
O método Harmonic Drive foi inventado pelo inventor americano C. Walt Musser em meados da década de 1950. Um redutor de engrenagem harmônica é composto de três partes principais: um gerador de ondas, uma engrenagem flexível e uma engrenagem rígida. O gerador de ondas controla a deformação elástica da engrenagem flexível, que, por sua vez, engrena com a engrenagem rígida para transmitir movimento e potência. A taxa de velocidade de transmissão de estágio único pode chegar de 70 a 1000. A deformação da engrenagem flexível permite a engrenagem reversa sem folga.
Em comparação com outros redutores, o Harmonic Gear Reducer é mais leve e compacto, com uma redução de volume e peso de 2/3 e 1/2, respectivamente, para o mesmo torque de saída. A engrenagem flexível deve ser feita de um material com alta resistência à fadiga e deve passar por um complexo processamento e tratamento térmico, pois suporta grandes cargas alternadas. O desempenho da engrenagem flexível é crucial para um redutor de engrenagens harmônicas de alta qualidade.
2. Servomotor e driver
Com relação a servomotores e acionamentos, as marcas europeias de destaque são Lenz, Lust e Bosch Rexroth. Esses motores e acionamentos europeus apresentam impressionante capacidade de sobrecarga, resposta dinâmica e forte abertura do driver e interface de barramento; no entanto, eles têm um preço alto.
As marcas japonesas, como Yaskawa, Panasonic e Mitsubishi, oferecem preços relativamente baixos, mas seus recursos de resposta dinâmica e abertura são insuficientes, e a maioria delas apresenta apenas modos de controle de quantidade analógica e de pulso.
3. Controlador
Em relação aos controladores de braço robótico de punção, a plataforma atual de controladores multieixos é dividida principalmente em duas categorias: placas de controle de movimento com processadores incorporados (como DSP e PowerPC) como núcleo, e sistemas PLC com computadores industriais e sistemas em tempo real como núcleo.
Os representantes dessas categorias são o cartão PMAC da DeltaTau e o sistema TwinCAT da Beckhoff, respectivamente.
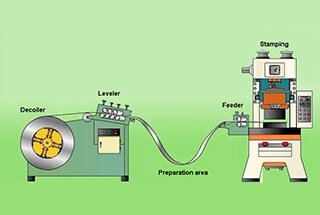
Principais formas de trabalho do braço robótico de punção
A formação de peças por estampagem é composta por um mecanismo de material superior e inferior e um punção. Os processos superior e inferior do punção são projetados para atender aos requisitos de operação automática e às condições de produção de acordo com as necessidades do processo de produção.
O braço robótico de puncionamento desempenha uma função crucial na linha de produção de estamparia. Ele controla a coordenação do movimento entre o braço robótico e a mesa giratória de alimentação, garantindo o carregamento e o descarregamento eficientes dos materiais. O braço tem uma manutenção estável, baixo tempo de resposta, alta confiabilidade e controle econômico.
No processo de estampagem, o braço robótico de punção executa automaticamente uma série de ações especificadas com base em um programa pré-selecionado, permitindo a fixação e o transporte automáticos de objetos. A distância do material alimentado pelo robô de alimentação automática para cada estampagem é chamada de "etapa de alimentação", que pode ser determinada com base na forma e no tamanho da peça estampada e nas necessidades do processo de estampagem.
O ciclo é sincronizado com o punção, o que permite a produção contínua. A estrutura geral é simples e compacta, com transmissão estável, desempenho confiável, uso seguro e operação conveniente. O braço também é fácil de processar, desmontar, ajustar e manter, além de ter uma fabricação econômica.
Ele tem um grande potencial de aplicação no setor de extrusão a frio, especialmente no processo de estampagem de rolamentos.
Formas de acionamento do braço robótico de punção
1. Acionamento hidráulico
O braço robótico acionado hidraulicamente da Punch Robotics é normalmente composto por componentes hidráulicos, como vários cilindros de óleo, motores de óleo, uma servoválvula, uma bomba de óleo e um tanque de óleo. O sistema é operado pelo atuador do braço robótico de acionamento.
Ele possui uma capacidade de elevação substancial, com a capacidade de levantar até centenas de quilos.
O braço robótico acionado hidraulicamente é conhecido por sua estrutura compacta, estabilidade durante a operação, resistência ao impacto, resistência à vibração e bom desempenho à prova de explosão. No entanto, para garantir seu funcionamento adequado, os componentes hidráulicos devem ser fabricados com alta precisão e ter forte capacidade de vedação para evitar vazamento de óleo e poluição ambiental.
2. Acionamento pneumático
O sistema de acionamento do braço robótico é normalmente composto de cilindros, válvulas de ar, tanques de ar e compressores de ar.
Esse sistema é caracterizado por sua conveniente fonte de ar, ação rápida, design simples, baixo custo e facilidade de manutenção.
No entanto, o controle da velocidade pode ser desafiador e a pressão do ar não deve ser muito alta, o que resulta em uma capacidade limitada de arrebatamento.
3. Acionado eletricamente
O acionamento elétrico do braço da Punch Robotics é o método mais comumente usado para alimentar o braço.
Ele é conhecido por sua fonte de alimentação conveniente, tempo de resposta rápido, força motriz forte (com peso de retenção da junta chegando a 400 kg), fácil detecção e processamento de sinais e capacidade de usar uma variedade de métodos de controle flexíveis.
O motor de acionamento normalmente usa um motor de passo, enquanto os servomotores CC (CA) são o principal modo de operação.
Para lidar com a alta velocidade do motor, é necessário usar um mecanismo de redução, como acionamento harmônico, acionamento por cata-vento cicloide RV, acionamento por engrenagem, acionamento por parafuso ou mecanismo de várias hastes.
No entanto, há uma tendência crescente de usar motores de alto torque e baixa velocidade para acionamento direto (DD) sem a necessidade de um mecanismo de redução, o que simplifica o sistema e melhora a precisão do controle.
4. Acionado mecanicamente
O acionamento mecânico do braço da Punch Robotics só é utilizado em situações em que é necessária uma ação fixa.
Normalmente, um mecanismo de articulação de came é usado para obter a ação especificada.
Esse método de acionamento é conhecido por sua operação confiável, alta velocidade de trabalho e baixo custo. No entanto, pode ser difícil fazer ajustes.
Como lidar com a falha do braço robótico de punção?
Embora o braço da Punch Robotics seja um produto de alta tecnologia, ele ainda pode apresentar problemas. No caso de um problema, há várias etapas que você pode seguir para resolvê-lo.
Normalmente, o braço da Punch Robotics apresenta poucos problemas. Entretanto, se você encontrar um problema, não entre em pânico. Primeiro, tente resolver o problema usando os métodos recomendados pelo fabricante.
Se não conseguir resolver o problema por conta própria, você pode entrar em contato diretamente com o fabricante para obter assistência. Todos os braços da Punch Robotics vêm com garantia de um ano e oferecem suporte pós-venda contínuo.
No caso de um problema, é melhor entrar em contato diretamente com o fabricante para obter uma solução.
1. Verifique se há fontes de perturbação próximas aos elementos de controle do braço robótico de estampagem
Se o sinal analógico de um braço robótico de estampagem estiver instável, depois de eliminar o problema com a fonte do sinal, é aconselhável considerar a possibilidade de perturbação do sinal. Para resolver o problema, é necessário identificar o tipo e a intensidade da fonte de perturbação. Isso pode ser feito instalando um isolador, usando fios de cola com blindagem dupla ou adicionando um ponto de aterramento do equipamento.
2. Verifique todas as fontes de energia, ar e hidráulicas do braço robótico de estampagem
O braço robótico de estampagem pode apresentar problemas devido a problemas com a fonte de alimentação, a fonte de ar e a fonte hidráulica. Para solucionar esses problemas, é importante verificar o seguinte:
Fonte de alimentação: Verifique se a tensão do circuito principal e do circuito de controle está normal e se não há perda de fase.
Fonte de ar: De acordo com os requisitos da fonte de ar, verifique se a pressão do sistema está normal, se a qualidade do ar comprimido atende aos padrões e se não há vazamentos ou bloqueios na tubulação.
Sistema hidráulico: Verifique se a pressão e a temperatura do sistema estão dentro das faixas normais, se não há vazamentos ou bloqueios na tubulação e se o sistema não está contaminado com impurezas.
3. Verifique os componentes de controle do braço robótico de estampagem
Em caso de problemas com o braço robótico de estampagem, é importante verificar se há algum problema no motor e na válvula que possa estar causando o problema. Em geral, esses problemas são relativamente simples de identificar e resolver.
Em seguida, é necessário inspecionar os componentes de controle, pois esses defeitos podem ser mais difíceis de detectar. Medições e testes cuidadosos, de acordo com o diagrama esquemático, devem ser realizados para determinar se as condições de operação dos componentes estão normais.
Se alguns componentes do controlador não puderem ser medidos ou avaliados, como um conversor de frequênciaSe o sistema de controle de qualidade não for testado, ele pode ser testado trocando-se os componentes ou substituindo-os por novos.
4. Verifique se a orientação do sensor ou do componente testado do braço robótico de estampagem está deslocada
A negligência da equipe de proteção do equipamento pode resultar na orientação incorreta de alguns sensores, como desalinhamento, mau funcionamento do sensor ou problemas de sensibilidade. Para evitar isso, é importante verificar regularmente a orientação e a sensibilidade dos sensores no braço robótico de estampagem e fazer os ajustes necessários. Se for constatado que um sensor está quebrado, ele deve ser substituído imediatamente.
Além disso, devido ao uso contínuo do equipamento de automação, a maioria dos sensores e blocos de detecção pode se soltar com o tempo. Portanto, durante a manutenção diária, é importante verificar se a orientação dos sensores no braço robótico de estampagem está correta e bem fixada.
Manutenção do braço robótico de estampagem
Devem ser realizadas inspeções e manutenções regulares de cada conjunto de braços robóticos de punção, e uma pessoa designada deve ser responsável por essa tarefa.
Antes de começar a trabalhar todos os dias, certifique-se de que o braço robótico de puncionamento esteja ligado. A máquina-ferramenta só pode ser operada após a confirmação de que está em condições normais de funcionamento.
Estabeleça uma rotina de limpeza regular do braço robótico de perfuração, prestando atenção especial à limpeza da placa do filtro para evitar o acúmulo de óleo e poeira. Se for viável, considere a possibilidade de construir uma cobertura protetora para o braço robótico de perfuração.
Se a máquina-ferramenta exigir a substituição ou a depuração da matriz, ajuste a altura e a distância de segurança do braço robótico do punção em uma posição adequada após a conclusão dessas tarefas.
Evite empilhar itens perto da instalação do braço robótico de perfuração para evitar possíveis danos ao braço.
As inspeções e a manutenção profissionais do braço robótico de estampagem devem ser realizadas pelo menos uma vez por ano, se possível. Se o braço robótico apresentar algum problema de funcionamento, não tente fazer reparos sem a devida autorização e procure a ajuda de um técnico profissional.
Análise do braço robótico de impressão
O primeiro modo de exame simulado (modo 1 e modo contínuo) enfatiza a importância da segurança ao viajar.
Com relação ao número de punções escravas, há duas opções: multiestação única e multiconexão.
Observação: o termo "aqui" refere-se tanto a uma única unidade quanto a várias unidades. Entretanto, uma linha de produção formada por várias unidades únicas está fora do escopo desta descrição.
Os quatro quadrantes a seguir podem ser obtidos:
Instalação única
Instalações múltiplas
Único Contínuo
Múltiplos contínuos
O nível de dificuldade aumenta gradualmente, começando do mais fácil para o mais difícil.
1. Instalação única
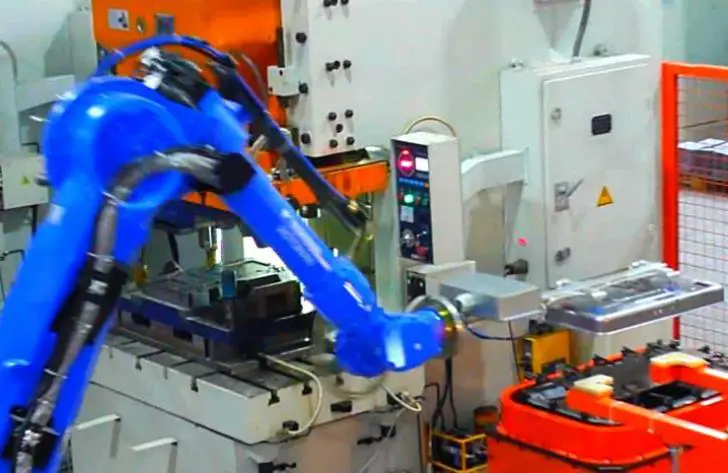
1) Muitas pessoas deveriam pensar em um robô de seis articulações imediatamente
As quatro principais famílias de robôs do setor, KUKA, YASKAWA, ABB e FANUC, são conhecidas por sua confiabilidade.
Vale a pena mencionar que, embora os robôs de seis juntas estejam bem estabelecidos no campo da soldagem, eles são mais adequados para aplicações de estampagem.
Por exemplo, a YASKAWA oferece robôs gerais e especializados para estamparia. É fundamental escolher o tipo especializado para tarefas de estampagem.
No entanto, esses robôs especializados têm um custo muito mais alto devido às várias configurações de redutores e motores.
Campo de aplicação: O campo mais versátil, com opções de design flexíveis.
Eficiência: Em média, esses robôs podem concluir de 6 a 8 ciclos por minuto.
Alguns modelos de alto desempenho podem até atingir 10 ciclos por minuto.
Preço: Apesar de sua alta eficiência, esses robôs têm um custo muito alto.
2) Simples braço robótico
Recentemente, esse tipo de robô se tornou muito popular, com centenas de fabricantes em Guangdong, na China.
Ele tem uma estrutura simples, baixo custo e pode ser operado por duas pessoas.
No entanto, deve-se observar que esse tipo de robô não está disponível na Europa, nos Estados Unidos, no Japão e na Coreia do Sul, o que destaca a conquista da China em fornecer a substituição mais econômica e rentável para robôs de seis juntas no campo de estampagem.
Esse tipo de robô me lembra o evento da onda gravitacional.
Para ir direto ao ponto, esse robô só é adequado para situações em que seu produto é único e produzido em grandes lotes.
Não há necessidade de trocar o molde com frequência ou depurar o braço robótico.
Caso contrário, você não deve escolher esse robô apenas por causa de seu baixo custo.
Campo de aplicação: Conhecido por seu design flexível, ele substitui todos os braços robóticos clássicos e domina o mercado.
Eficiência: Difícil de determinar.
Preço: Tão baixo quanto você quiser (alguns marcaram o preço público em 30.000).
3) No molde braço robótico (herança clássica)
Agora que já discutimos a "nova estrela", vamos passar para a discussão do design maduro.
De modo geral, esse tipo de equipamento é usado para lidar com tarefas entre vários processos de uma única máquina.
É importante observar que a garra mecânica é posicionada no espaço entre as estações da matriz quando a prensa é pressionada para baixo. Portanto, é necessário reservar espaço suficiente no projeto.
Aplicação: Usado no manuseio de moldes.
Eficiência: 8 a 10 ciclos por minuto.
Preço: Econômico.
2. Instalação múltipla
1) Link braço robótico
Esse tipo de equipamento apresenta uma haste de conexão que passa por uma fileira de punções, o que o torna ideal para conectar vários conjuntos de punções de pequena tonelagem.
Uma estação intermediária é colocada no centro da prensa, o que pode ajudar no processo de rotação.
Aplicação: Usado no manuseio de moldes.
Eficiência: 8 a 10 ciclos por minuto.
Preço: Econômico.
2) Independente braço robótico
Esse tipo de equipamento é adequado para o manuseio de chapas metálicas pequenas com um espaçamento de punção não superior a 1500.
Campos de aplicação: Manuseio de pequenas chapas metálicas e conexão de várias prensas.
Eficiência: 8 a 12 ciclos por minuto.
Preço: Econômico.
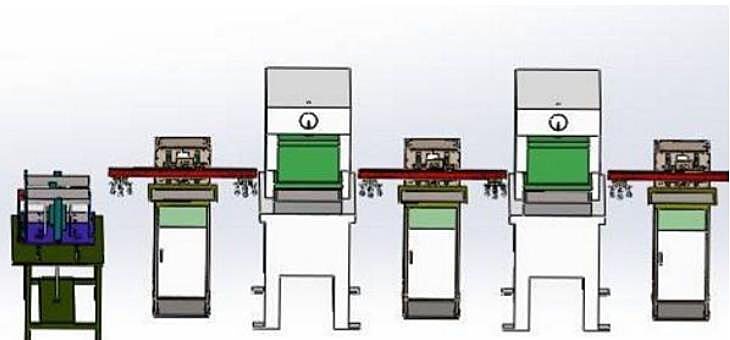
3. Único contínuo
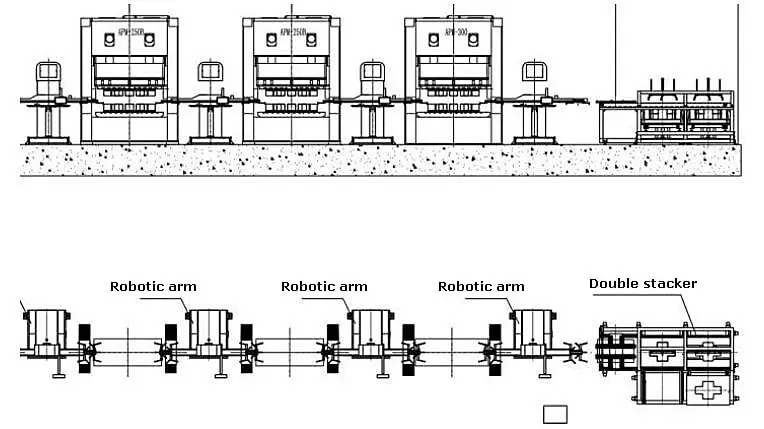
1) NC 3D duas barras braço robótico
Aproximadamente 70% de peças estampadas em países desenvolvidos são processadas usando esse método, que é simples e eficiente.
Atualmente, apenas alguns fabricantes nacionais de braços robóticos se destacam nessa área, especialmente no setor de ponta de braços robóticos de estampagem nacionais.
É importante considerar o projeto da curva de interferência do equipamento no início do processo de planejamento.
Aplicação: Esse tipo de equipamento tem uma ampla gama de aplicações, incluindo punções de grande tonelagem e estampagem em várias estações.
Eficiência: A eficiência é bastante afetada pelo curso e, normalmente, varia de 15 a 40 ciclos por minuto.
Preço: Essa é a opção mais econômica.
2) NC 2D de duas barras braço robótico
Esse tipo de equipamento tem um eixo de elevação a menos do que um braço robótico tridimensional.
É importante manter a mesma altura horizontal das peças processadas após a desmoldagem durante o processo de projeto do molde.
Aplicação: Adequado para peças pequenas, como caixas de bateria e caixas de motor.
Eficiência: A eficiência é muito afetada pelo processo e pode chegar a 150 ciclos por minuto para caixas de baterias 18650. É normal que as peças perfuradas completem de 20 a 40 ciclos por minuto.
Preço: Econômico.
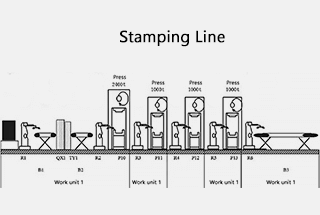
4. Múltiplo contínuo
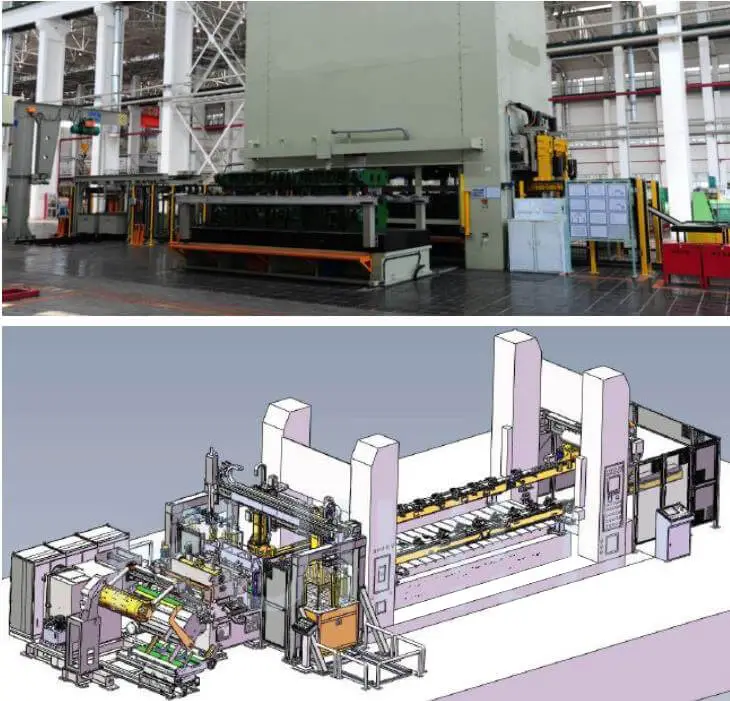
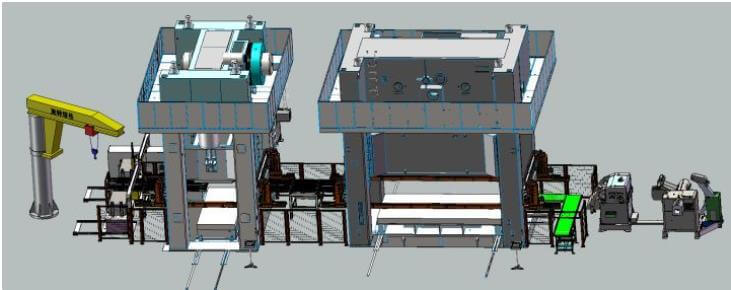
1) Linha de produção personalizada OEM
Centenas de bilhões de linhas de produção olham para cima com admiração, tudo parece pálido.
Como fundador do MachineMFG, dediquei mais de uma década de minha carreira ao setor de metalurgia. Minha vasta experiência permitiu que eu me tornasse um especialista nas áreas de fabricação de chapas metálicas, usinagem, engenharia mecânica e máquinas-ferramentas para metais. Estou sempre pensando, lendo e escrevendo sobre esses assuntos, esforçando-me constantemente para permanecer na vanguarda do meu campo. Permita que meu conhecimento e experiência sejam um trunfo para sua empresa.
Você já se perguntou como são feitas as peças de metal do seu carro ou dos eletrodomésticos? A estampagem de metal, um processo que envolve a modelagem de chapas de metal com matrizes, é fundamental. Esse método oferece alta...
Você já se perguntou como os carros são fabricados com tanta rapidez e segurança? Este artigo revela a mágica por trás das linhas de produção de estamparia automatizada, em que os robôs substituem o trabalho manual, aumentando a eficiência em...
Você já se perguntou sobre o fascinante mundo da estampagem de metais? Nesta postagem do blog, embarcaremos em uma jornada empolgante para explorar os meandros desse processo essencial de fabricação....
Imagine aumentar a eficiência de sua fábrica com uma oficina de estamparia perfeitamente projetada. Este artigo aborda os aspectos essenciais do planejamento de uma oficina para peças automotivas, desde a seleção de equipamentos até o layout...
Você já pensou no potencial revolucionário da tecnologia de prensa servo na fabricação? Neste artigo, exploraremos como essas máquinas avançadas estão revolucionando o setor, oferecendo precisão, eficiência e...
Você já se perguntou quais fabricantes dominam o setor de prensas de punção de torre? Este artigo apresenta os cinco principais fabricantes globais de prensas de punção de torre, detalhando suas histórias, inovações e destaques...