Бесщеточные двигатели постоянного тока (BLDC) и синхронные двигатели с постоянными магнитами (PMSM) - два широко распространенных типа двигателей в современной электротехнике.
Хотя они имеют много общего, между ними все же есть некоторые важные различия. В этой статье приводится исчерпывающее, фактическое и подробное сравнение этих двух типов двигателей по нескольким аспектам.
1. Принцип работы и структура бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока:
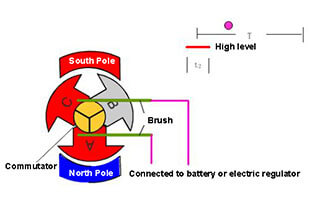
Бесщеточный двигатель постоянного тока работает на вращающемся магнитном поле, образованном магнитным потенциалом на конце вала, синхронизируя переключение фаз через чувствительный полюс для приведения в движение ротора.
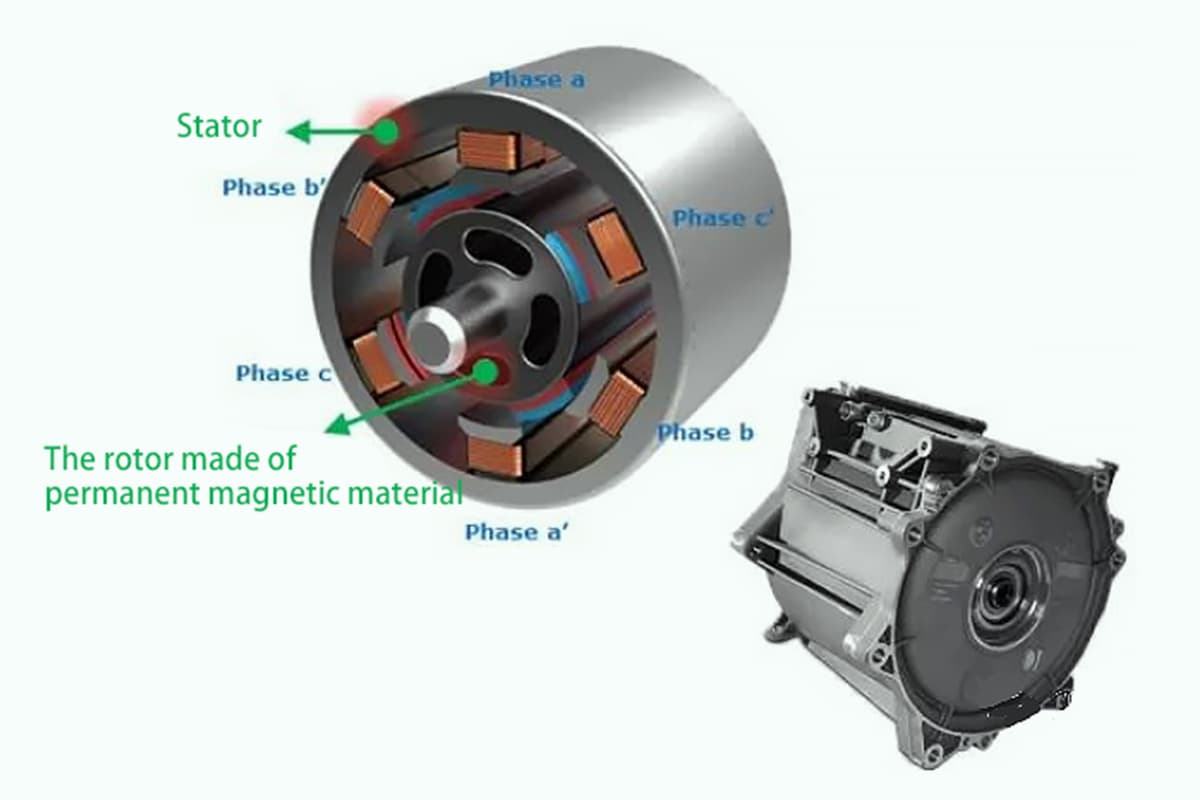
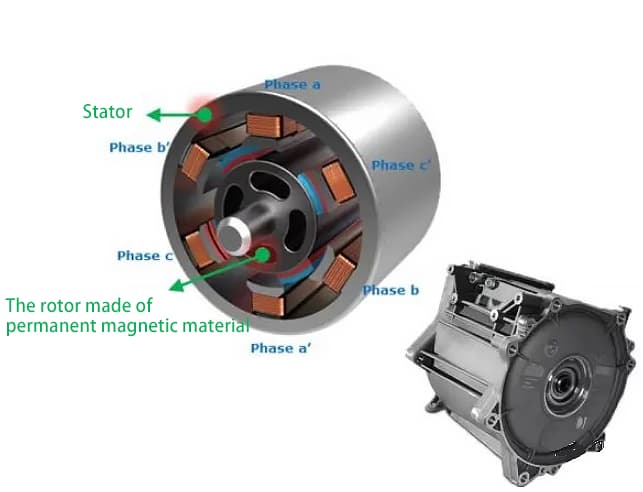
Его конструкция состоит из ротора, образованного постоянными магнитами, статора, обмотанного катушками, и датчика положения. Изменяя направление и величину тока, можно управлять движением ротора.
Синхронный двигатель с постоянным магнитом:
Синхронный двигатель с постоянными магнитами работает на основе взаимодействия магнитных потенциалов между статором и ротором, создавая крутящий момент, приводящий в движение ротор.
Ротор создает вращающееся магнитное поле с помощью постоянных магнитов, а катушки статора - возбуждающее магнитное поле. Взаимодействие этих двух магнитных полей приводит ротор в движение.
Структура синхронного двигателя с постоянными магнитами похожа на структуру бесщеточного двигателя постоянного тока, но разница заключается в функции статорных катушек: в бесщеточных двигателях постоянного тока они способствуют созданию магнитного поля, тогда как в синхронных двигателях с постоянными магнитами они генерируют магнитное поле возбуждения.
2. Методы управления бесщеточным двигателем постоянного тока:
Бесщеточный двигатель постоянного тока:
Управление бесщеточными двигателями постоянного тока в основном включает два метода: обратную связь с датчиком Холла и управление обратной электродвижущей силой. Метод обратной связи с датчиком Холла определяет время коммутации, определяя положение ротора, контролируя направление и величину тока.
Метод управления обратной электродвижущей силой оценивает положение ротора и измеряет обратную электродвижущую силу катушек якоря для управления. Этот метод обеспечивает высокий КПД и высокий крутящий момент.
Синхронный двигатель с постоянным магнитом:
Методы управления синхронными двигателями с постоянными магнитами в основном включают в себя управление по току и управление по полю. Метод управления по току контролирует крутящий момент и скорость двигателя путем измерения тока.
Управление, ориентированное на поле, оценивает положение ротора и измеряет обратную электродвижущую силу ротора для управления током, достигая более точного управления и реакции.
3. Плотность мощности и эффективность Бесщеточный двигатель постоянного тока:
Бесщеточный двигатель постоянного тока:
Бесщеточные двигатели постоянного тока обладают высокой удельной мощностью и эффективностью. Благодаря простой конструкции, отсутствию щеток и проблем с их износом, они могут достигать высокой выходной мощности.
Кроме того, использование системы управления обратной электродвижущей силой снижает потери меди и железа, обеспечивая эффективную работу.
Синхронный двигатель с постоянным магнитом:
Синхронные двигатели с постоянными магнитами имеют высокую удельную мощность, но относительно низкий КПД. Из-за сложной конструкции и необходимости поддерживать возбуждающее магнитное поле в катушках статора происходят потери меди и железа.
Кроме того, наличие вращающегося магнитного поля приводит к дополнительным потерям на вихревые токи. Тем не менее, эффективность может быть повышена благодаря оптимизированным стратегиям управления и передовым технологиям производства материалов.
4. Характеристики отклика и диапазон регулирования Бесщеточный двигатель постоянного тока
Бесщеточный двигатель постоянного тока:
Бесщеточные двигатели постоянного тока обладают хорошими характеристиками отклика и широким диапазоном регулирования. Поскольку их роторы изготовлены из постоянных магнитов, они обладают низкой инерцией ротора и быстрой скоростью отклика. Кроме того, бесщеточные двигатели постоянного тока позволяют добиться точного управления путем регулировки величины и направления тока в соответствии с различными эксплуатационными требованиями.
Синхронный двигатель с постоянным магнитом:
Синхронные двигатели с постоянными магнитами имеют относительно худшие характеристики отклика и более узкий диапазон регулирования. Из-за большей инерции ротора скорость его реакции ниже. Кроме того, управление синхронными двигателями с постоянными магнитами является более сложным, требующим точной оценки положения ротора и обратной электродвижущей силы для точного управления.
5. Завершите
В целом, бесщеточные двигатели постоянного тока и синхронные двигатели с постоянными магнитами имеют заметные различия в таких аспектах, как принцип и структура, методы управления, удельная мощность и эффективность, а также характеристики отклика и диапазон регулирования. В зависимости от требований приложения, необходимо выбрать подходящий тип двигателя можно выбрать.
Бесщеточные двигатели постоянного тока подходят для приложений, требующих высокой мощности и точного управления, а синхронные двигатели с постоянными магнитами - для приложений, требующих высокой плотности мощности и более широкого диапазона управления.