Достижение оптимальной конструкции кулачкового приводного механизма: Ключевые моменты для рассмотрения
Как простая система кулачков и последователей может привести к эффективному и точному движению в сложных механизмах? В этой статье рассматриваются тонкости проектирования кулачковых приводных механизмов, объясняются различные типы кулачков и последователей, пути их движения и способы достижения оптимальной производительности. Начиная с основных компонентов и заканчивая передовыми методами проектирования, читатели получат ценные сведения о создании высокоэффективных кулачковых систем. Ожидайте получить практические советы и подробный анализ, которые улучшат ваше понимание и применение кулачковых механизмов в инженерных проектах.
Кулачковый механизм обычно состоит из двух подвижных частей - кулачка и последователя, которые крепятся к раме. Кулачковое устройство очень универсально и может генерировать практически любое произвольное движение.
Кулачок можно определить как деталь с изогнутой поверхностью или канавкой. Качаясь или вращаясь, другой компонент, последователя, может обеспечить заданное движение. Для получения возвратно-поступательного движения путь следящего элемента в основном ограничен пазом.
Некоторые механизмы, полагаясь на собственный вес во время обратного хода, используют пружины в качестве возвращающей силы для достижения точных движений. Другие используют направляющие рельсы для перемещения по определенным траекториям.
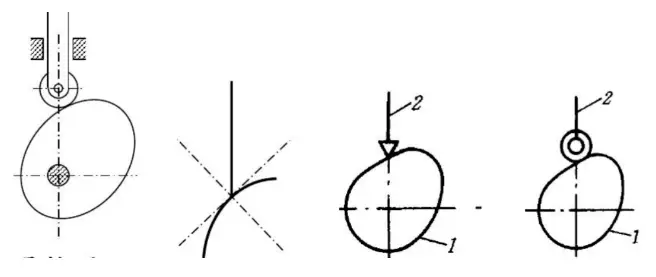
По форме кулачки можно разделить на три типа: дисковые, подвижные и цилиндрические.
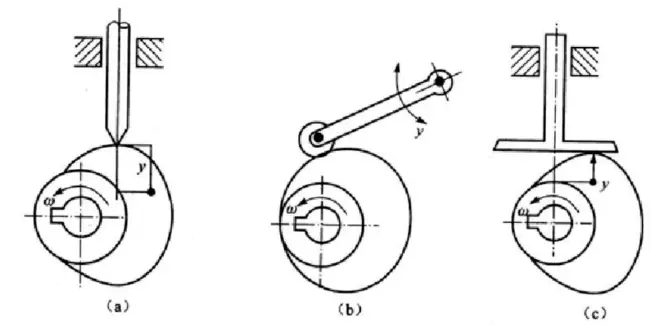
В соответствии с концами последователи можно разделить на три типа: остроконечные, роликовые и плоскодонные.
Типы кулачковых механизмов (a) Заостренный следящий элемент; (b) Роликовый следящий элемент: (c) Плоский нижний следящий элемент
Из-за точечного контакта остроносого следящего элемента с кулачком, который приводит к высоким напряжениям и быстрому износу, он не подходит для низкоскоростных кулачковых механизмов с большими ударами. Роликовый привод позволяет устранить эти недостатки.
Чтобы повысить эффективность передачи, мы также можем ввести последователя с плоским дном, которое перпендикулярно направлению силы на нижней поверхности.
Компоненты трансмиссии, которые мы рассматривали ранее, имеют форму прямолинейного движения, но они также могут быть в форме колебательного движения. Первый вариант называется прямолинейным, а второй - качающимся.
Мы также можем сделать так, чтобы центр вращения кулачка не совпадал с линейной траекторией движения последователя. В этом случае мы называем его смещенным. Соответственно, если центр вращения находится на линейной траектории движения последователя, мы можем назвать его концентрическим.
Кроме того, мы можем рассмотреть методы поддержания высоконапряженных связей блокировки и разделить механизм на геометрическую блокировку и силовую блокировку.
Комбинируя форму кулачка, конец следящего элемента и характер движения следящего элемента, мы можем определить название разработанного механизма, например: дисковый кулачок с остроносым следящим элементом прямого действия (относительное положение следящего элемента + конец следящего элемента + характер движения следящего элемента + форма кулачка).
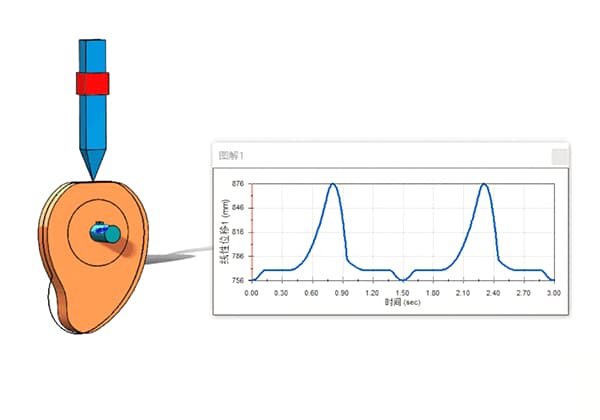
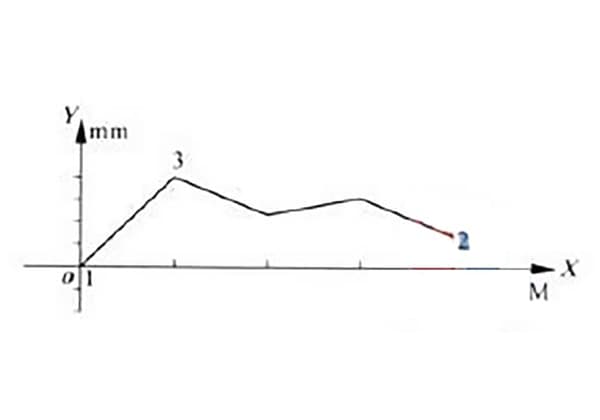
Процесс движения кулачковых механизмов
Кулачковый механизм
Во-первых, у нас есть кулачок с установленным на нем последователем. Когда кулачок поворачивается с угловой скоростью ω на φs градусов, следящий элемент не перемещается. В этот момент мы называем угол φs углом остановки, а соответствующую ему окружность - базовой окружностью. Аналогично, радиус этой окружности называется радиусом базовой окружности r0.
Затем, когда мы продолжаем вращать кулачок с угловой скоростью ω на φ градусов, следящий элемент поднимается на h. В этот момент мы называем φ углом хода, а h - ходом.
Затем, когда следящий элемент достигает точки h, мы оставляем его на некоторое время. Тем временем кулачок поворачивается на угол φs', который соответствует углу подъема.
Наконец, нам нужно вернуть следящий элемент в исходное положение, поэтому мы поворачиваем кулачок на φ'. В это время последователь возвращается в исходную точку. Угол φ' мы называем углом возврата.
Как сконструировать кулачковый механизм?
Существует два основных метода проектирования кулачковых механизмов: графический и аналитический.
Первый вариант относительно прост: требуется только предоставить требуемую диаграмму толчкового движения, а затем получить соответствующую контурную кривую на основе зависимости угла от процесса, представленной на диаграмме.
Точность не очень высокая. Последний вариант является расчетным, и его расчет относительно сложен, что подходит для проектирования кулачковых механизмов с высокими требованиями к точности.
Не забывайте, что делиться - значит заботиться! : )
Поделиться
Facebook
Twitter
LinkedIn
Reddit
VK
Электронная почта
Печать
Автор
Шейн
Основатель MachineMFG
Как основатель MachineMFG, я посвятил более десяти лет своей карьеры металлообрабатывающей промышленности. Мой обширный опыт позволил мне стать экспертом в области производства листового металла, механической обработки, машиностроения и станков для обработки металлов. Я постоянно думаю, читаю и пишу об этих предметах, постоянно стремясь оставаться на переднем крае своей области. Позвольте моим знаниям и опыту стать преимуществом для вашего бизнеса.
Вы когда-нибудь задавались вопросом, как настроить сервопривод для достижения максимальной производительности? Это руководство охватывает все, что вам нужно знать о настройке параметров усиления, от управления положением до регулирования скорости.....
Как предотвратить растрескивание пресс-форм во время термообработки? Эта статья посвящена сложному процессу термообработки пресс-форм и описывает такие распространенные дефекты, как закалочные трещины и недостаточная...
Задумывались ли вы когда-нибудь о том, какая точность требуется при затягивании фланцевых болтов? Правильная техника может предотвратить утечки и обеспечить безопасность в системах высокого давления. В этой статье рассматриваются основные методы...
Как измерить прямолинейность направляющей шины, чтобы обеспечить точность работы станка? В этой статье рассматриваются два распространенных метода: метод соединения двух концевых точек и метод минимальных условий...
Как полировальные машины добиваются идеальной отделки металлических поверхностей? В этой статье мы исследуем сложную механику, лежащую в основе этих важнейших инструментов. Начиная с компонентов и заканчивая двухступенчатой...
Эта статья погружает в увлекательный мир производства литья, раскрывая пошаговый процесс превращения сырья в необходимые компоненты. Узнайте о технике, материалах и проверке качества,...
Представьте себе ежедневное производство тысяч сложных пластиковых деталей с высокой точностью и скоростью. Литье под давлением, революционная технология производства, делает это возможным, впрыскивая расплавленный материал в формы для...
Представьте себе, что точность станков можно раскрыть с помощью простой стеклянной поверхности. Линейные решетчатые шкалы именно так и поступают, преобразуя тонкие линии в высокоточные измерения. В этой статье рассматривается, как эти...
Вы когда-нибудь задумывались о том, как плавно работают шестеренки в вашем автомобиле или самолете? В этой статье мы расскажем о ведущих производителях шестеренок, которые формируют будущее машиностроения. Вы узнаете...