Окончательное руководство по энкодерам: Типы, применение и преимущества
Вы когда-нибудь задумывались, как машины точно определяют свое положение и скорость? В этой статье мы познакомимся с увлекательным миром энкодеров - датчиков, которые необходимы для определения механического движения. Вы узнаете о различных типах энкодеров, принципах их работы и применении в современном оборудовании. Приготовьтесь раскрыть секреты точности управления двигателями и многое другое!
Энкодеры - это тип датчиков, используемых в основном для определения скорости, положения, угла, расстояния или количества механических движений.
Помимо использования в машинах, для многих систем управления двигателями, таких как серводвигатели, энкодеры необходимы для обеспечения обратной связи с контроллером двигателя для определения коммутации, скорости и положения.
2. Классификация кодирующих устройств
Энкодеры можно разделить на аналоговые и цифровые. Аналоговый энкодер можно разделить на поворотный трансформатор и Sin/Cos энкодер, а цифровой энкодер можно разделить на инкрементный и абсолютный энкодер.
3. Принципы работы широко используемых кодирующих устройств
3.1 Принцип работы цифровых энкодеров
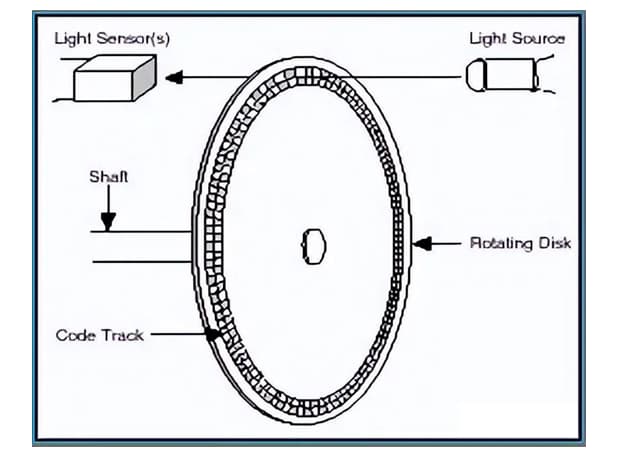
1) Используйте фотоэлектрические соединители для сканирования сегментированного диска, установленного на механическом валу.
Механический код преобразуется в пропорциональные электрические импульсные сигналы.
Источник света (как правило, светодиод) излучает узкий пучок света в сторону приемника (который может быть фотодиодом). Как источник света, так и приемник устанавливаются строго в неподвижных частях вращающегося соединительного подшипника.
Энкодер представляет собой затеняющий диск с прозрачным отверстием или окном, который устанавливается во вращающуюся часть подшипника.
3.2 Принцип работы фотоэлектрических цифровых энкодеров
Когда подшипник вращается, энкодер пропускает луч света (проходит через маленькое окошко на диске).
При изменении положения фотодиод выдает соответствующие сигналы высокого или низкого уровня. Выходной сигнал фотодиода может быть преобразован в информацию о положении и скорости с помощью специализированной схемы.
3.2.1 Выход инкрементальных энкодеров
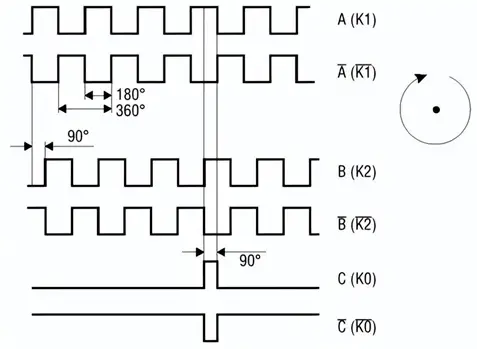
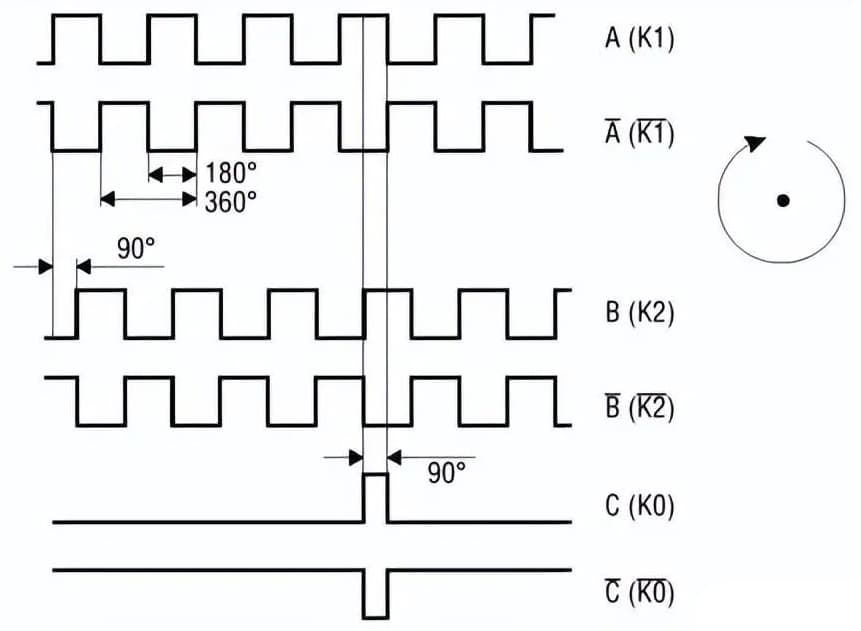
Выходной сигнал инкрементального энкодера состоит из фотоэлектрического диска с центральным валом и круговыми прозрачными и непрозрачными метками, которые считываются фотоэлектрическими излучателем и приемником для получения сигналов квадратной волны, объединенных в виде A, B, -A, -B.
Каждая пара сигналов имеет 90-градусную разность фаз C (один цикл равен 360 градусам).
Кроме того, имеется сигнал калибровки нулевой точки, и энкодер выдает один сигнал на каждый оборот диска.
Используется для однонаправленного счета и однонаправленного измерения скорости.
2. Двухфазное соединение A-B
Используется для двунаправленного подсчета и определения направления и скорости.
3. Трехфазное соединение A-B-C
Используется для определения скорости с коррекцией опорного положения.
Соединение A-A-B-B-C-C имеет симметричный отрицательный ток подключения сигнала, который имеет минимальное затухание и сильную защиту от помех, и может быть выведен на большие расстояния.
Как определить направление
Поскольку фазы A и B расходятся на 90 градусов, направление можно определить, определив, A или B возникает первым.
Как выполнить калибровку нулевого положения
Во время передачи импульсов энкодера могут возникать ошибки, вызванные, например, помехами, что приводит к ошибкам передачи.
В это время необходимо своевременно выполнить калибровку нулевого положения.
Энкодер C выдает один импульс при каждом обороте, который называется нулевым или идентификационным импульсом и используется для определения нулевого или идентификационного положения.
Для точного измерения нулевого импульса, независимо от направления вращения, нулевой импульс выводится в виде комбинации высокого уровня двух каналов.
Из-за разницы фаз между каналами нулевой импульс составляет лишь половину длины импульса.
Схема коррекции нулевой точки
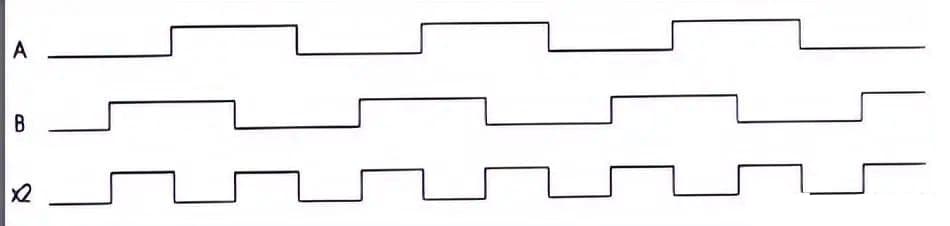
3.2.3 Множитель инкрементальных энкодеров
Из-за технологических ограничений и ограничений на выборку невозможно добиться более тонкого и точного физического разделения кодирующего диска.
Однако более высокие импульсы могут быть достигнуты за счет цифрового преобразования схемы.
Двухчастотный сигнал
Получен путем преобразования фаз A и B по принципу "исключающее или".
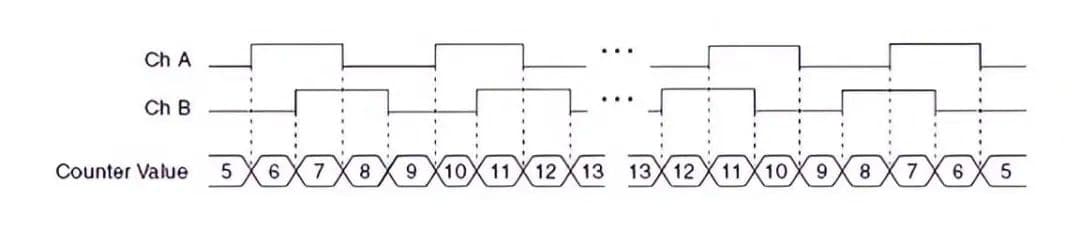
Четырехчастотный сигнал
Счетчик также увеличивается или уменьшается на каждом краю каналов A и B. Направление счетчика определяется тем, какой канал опережает другой.
Число в счетчике увеличивается или уменьшается на 4 за каждый цикл.
3.2.4 Особенности инкрементальных энкодеров
Энкодер выдает импульсный сигнал для каждого заданного угла поворота, а угол поворота рассчитывается путем подсчета количества импульсных сигналов.
Поэтому данные о положении, выдаваемые энкодером, являются относительными.
Поскольку используется фиксированный импульсный сигнал, начальное положение угла поворота может быть задано произвольно.
Из-за использования относительного кодирования данные об угле поворота будут потеряны, и после отключения питания их придется восстанавливать.
3.2.5 Проблемы с инкрементальными энкодерами
1) Инкрементальные энкодеры имеют суммарные ошибки в нулевой точке.
2) Они обладают слабой способностью противостоять помехам.
3) После отключения питания или выключения приемного устройства необходимо выключить его и снова найти опорную позицию.
Появление абсолютных энкодеров решает эти проблемы.
3.3 Принцип работы абсолютного энкодера
Абсолютный энкодер представляет собой диск со световым кодом, на котором выгравировано несколько световых каналов и линий.
Каждый канал кодируется с помощью 2, 4, 8, 16 и так далее последовательно расположенных линий.
В каждом положении энкодера считываются световые каналы, и их состояние включения/выключения используется для получения уникального двоичного кода, известного как код Грея, в диапазоне от 2^0 до 2^(n-1), где n - количество разрядов абсолютного энкодера.
Положение энкодера определяется механически с помощью диска со световым кодом, поэтому на него не влияют перебои в подаче электроэнергии или помехи.
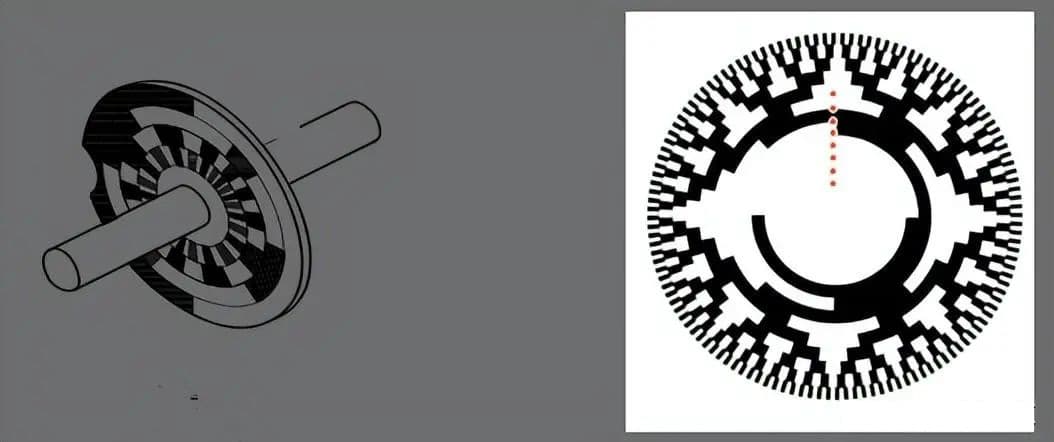
3.3.1 Кодовый диск абсолютного энкодера
Диск со световым кодом сканируется группой фотоэлектрических соединителей для получения уникального кода в каждой позиции. Каждая позиция имеет свой уникальный код.
Смежные целые числа в его цифровом представлении имеют только одну разницу, что позволяет избежать возникновения большого пикового тока в цепи цифрового преобразования (например, 3-4, 0011-0100).
Формат преобразования двоичных кодов в серые:
Старшие разряды сохраняются, а второй старший разряд получается путем выполнения операции "исключающее или" над старшими разрядами и вторым старшим разрядом (в двоичном формате).
Справочник по десятичным кодам и кодам Грея.
Десятичные
Серый код
0
0000
1
0001
2
0011
3
0010
4
0110
5
0111
6
0101
7
0100
Десятичные
Серый код
8
1100
9
1101
10
1111
11
1110
12
1010
13
1011
14
1001
15
1000
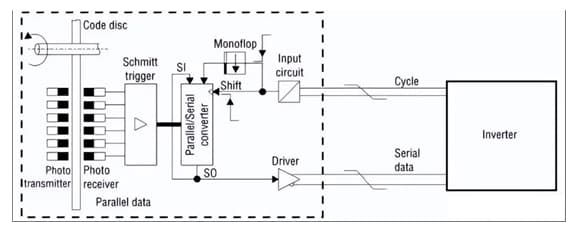
3.3.2 Выходные форматы абсолютных энкодеров
1. Режим параллельного вывода
В этом режиме на каждый бит данных (битовый канал) приходится один кабель, а уровень сигнала (высокий или низкий) на каждом кабеле представляет собой 1 или 0.
Физическое устройство похоже на инкрементальный энкодер и имеет различные типы, такие как коллекторный открытый PNP, NPN, дифференциальный привод, push-pull, дифференциальный высоко- или низкоэффективный в зависимости от формата физического устройства.
Параллельный выход обычно имеет форму кода Грея, также называемого кодировщиком кода Грея.
2. Выход синхронного последовательного интерфейса (SSI)
В этом режиме данные концентрируются и передаются по группе кабелей. Вывод данных упорядочивается протоколом связи, который определяет временные параметры.
Последовательный выход использует меньше соединительных линий и может передавать данные на большие расстояния, что значительно повышает защиту и надежность энкодера.
Высокоразрядные абсолютные энкодеры и многооборотные абсолютные энкодеры обычно используют последовательный выход.
3. Асинхронный последовательный формат
В этом режиме обмен инструкциями и данными происходит по принципу "вопрос-ответ", а интерфейс является дуплексным. Типичным примером является интерфейс RS485, для которого требуется всего два кабеля.
Содержимым данных может быть значение положения энкодера или другое содержимое, запрошенное инструкцией.
Например, если добавить адрес для каждого датчика, то несколько датчиков могут совместно использовать кабель передачи и последующего приема. Такая форма называется типом полевой шины.
4. Принцип работы гибридного кодера
Инкрементное и абсолютное кодирование интегрированы на одном диске.
Крайняя окружность диска содержит инкрементные полосы высокой плотности, а средняя часть - канал двоичного кода Грея абсолютного энкодера.
Вращение диска отображается путем подсчета количества импульсов за оборот, а угол поворота за неделю подсчитывается с помощью цифрового значения кода Грея.
Многооборотный абсолютный энкодер: в основе однооборотного абсолютного энкодера лежит принцип часового механизма, передающего вращение центрального диска на другой набор дисков (или несколько наборов шестеренок и дисков) посредством зубчатой передачи, что добавляет кодирование количества оборотов на основе однооборотного кодирования для расширения диапазона измерений энкодера.
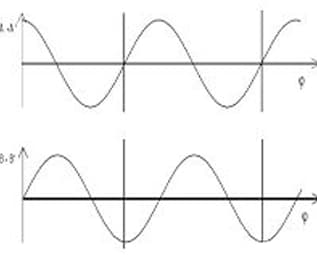
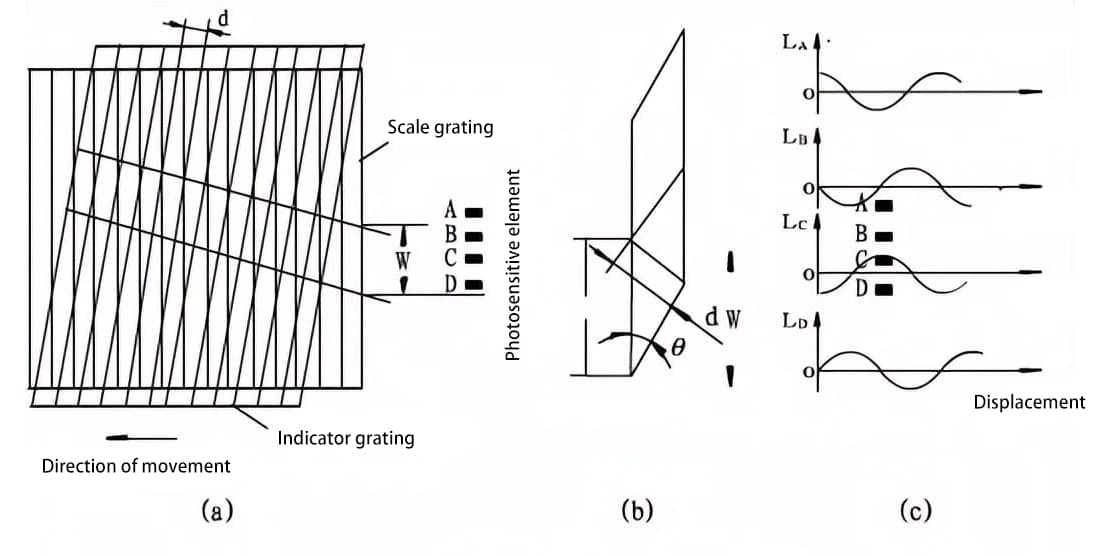
Когда параллельный свет проходит через решетку, интенсивность образующихся полос Муаре приближается к косинусоидальной функции.
При размещении четырех 1/4 бахромы Муаре фоточувствительных элементов в направлении движения бахромы Муаре можно получить четыре набора синусоидальных и косинусоидальных выходных сигналов.
Форма выходного сигнала синусно-косинусного кодера
Рисунок Принцип работы решетки
Линейный энкодер
Линейный энкодер измеряет расстояние линейного перемещения объекта и преобразует измеренное расстояние в импульсный электрический сигнал.
Проще говоря, принцип заключается в том, чтобы вытянуть диск поворотного энкодера в прямую линию.
Кодировщик шкалы решетки
Принцип работы датчика смещения решетки заключается в том, что при относительном смещении основной (т.е. масштабной) и вспомогательной (т.е. индикаторной) решеток в паре решеток в результате интерференции и дифракции света образуется регулярный черно-белый (или ярко-темный) полосатый узор, называемый бахромой Муаре.
Одинаковые черно-белые (или яркие и темные) полосы преобразуются в синусоидальные электрические сигналы с помощью фотоэлектрических устройств.
После усиления и формирования цепями формирования получаются два синусоидальных или квадратных сигнала с разностью фаз 90 градусов, которые поступают на цифровой дисплей решетки для подсчета и отображения.
Поворотный трансформатор
Вращающийся трансформатор, также известный как резольвер, - это тип микродвигателя, используемого для управления.
Это косвенное измерительное устройство, преобразующее механическое вращение в электрический сигнал, который связан с углом поворота определенной математической функцией.
Принцип работы поворотного трансформатора
1. Вращающийся трансформатор - это сигнальный компонент, который выдает напряжение, изменяющееся в зависимости от угла поворота ротора.
Когда обмотка возбуждения возбуждается переменным напряжением определенной частоты, амплитуда напряжения выходной обмотки находится в синусоидальной или косинусоидальной зависимости от угла поворота ротора, или поддерживает определенную пропорциональную зависимость, или имеет линейную зависимость от угла поворота ротора в определенном диапазоне.
2. Распределение магнитного потока между статором и ротором роторного трансформатора подчиняется правилу синуса.
Поэтому, когда напряжение возбуждения подается на обмотку статора, обмотка ротора генерирует индуцированную электродвижущую силу через электромагнитную связь, как показано на рисунке выше.
Величина выходного напряжения зависит от углового положения ротора и, следовательно, изменяется синусоидально со смещением ротора.
Согласно принципу работы трансформатора, если число витков в первичной обмотке равно N1, а число витков во вторичной обмотке равно N2, то k = N1 / N2 - это коэффициент трансформации. Когда к первичной обмотке прикладывается переменное напряжение
Таким образом, пока определяется фазовый угол выходного напряжения ротора, угол поворота ротора известен.
2. Режим обнаружения амплитуды
В практических приложениях, непрерывно изменяя электрический угол модулирующего напряжения, можно отслеживать изменение механического угла и измерять амплитуду индуцированного напряжения для получения данных о смещении механического угла.
5. Меры предосторожности при установке энкодеров
Механические аспекты:
1. При установке обратите внимание на допустимую нагрузку на вал;
2. Убедитесь, что разность осей вала энкодера и вала пользователя выходной вал составляет менее 0,20 мм, а угол отклонения от оси - менее 1,5°;
3. Во время установки избегайте ударов, падений и столкновений, чтобы не повредить вал и диск;
4. При длительной эксплуатации регулярно проверяйте, не ослабли ли винты, крепящие энкодер (раз в квартал).
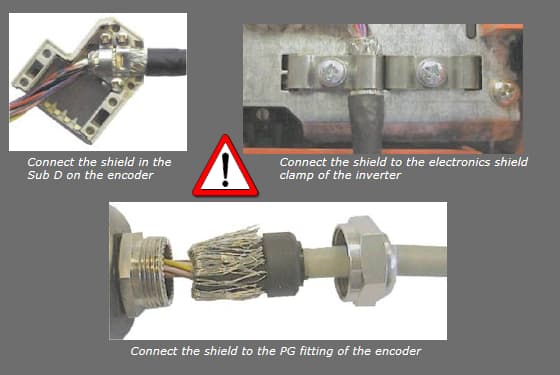
Электрические аспекты:
1) Провод заземления должен быть как можно толще, обычно более 1,5 квадратных миллиметров;
2) Выходные провода энкодера не должны пересекаться друг с другом во избежание повреждения выходной цепи;
3) Во избежание повреждения выходной цепи сигнальные провода энкодера не должны быть подключены к постоянному или переменному току;
4) Оборудование, например, двигатели, подключенные к энкодеру, должны быть хорошо заземлены и не подвержены статическому электричеству.
Не забывайте, что делиться - значит заботиться! : )
Поделиться
Facebook
Twitter
LinkedIn
Reddit
VK
Электронная почта
Печать
Автор
Шейн
Основатель MachineMFG
Как основатель MachineMFG, я посвятил более десяти лет своей карьеры металлообрабатывающей промышленности. Мой обширный опыт позволил мне стать экспертом в области производства листового металла, механической обработки, машиностроения и станков для обработки металлов. Я постоянно думаю, читаю и пишу об этих предметах, постоянно стремясь оставаться на переднем крае своей области. Позвольте моим знаниям и опыту стать преимуществом для вашего бизнеса.
Представьте себе, что точность станков можно раскрыть с помощью простой стеклянной поверхности. Линейные решетчатые шкалы именно так и поступают, преобразуя тонкие линии в высокоточные измерения. В этой статье рассматривается, как эти...
Вы когда-нибудь задумывались, как сглаживаются острые края металлических деталей? Этот процесс, известный как снятие фаски, превращает опасные зазубренные углы в более безопасные угловатые поверхности. В этой статье вы...
Вы когда-нибудь задумывались о том, какие марки подшипников являются лучшими в мире? В этой статье мы рассмотрим ведущих производителей подшипников, известных своим исключительным качеством, инновациями и...
Вы когда-нибудь задумывались о том, кто питает мир за кулисами? В этой статье мы подробно рассмотрим ведущих производителей генераторов, которые обеспечивают...
Вы начинающий инженер-механик, желающий добиться успеха в своей области? В этой статье мы рассмотрим 10 лучших программ для проектирования машиностроения, которые помогут вам повысить...
Вы когда-нибудь задумывались, как обеспечивается целостность приваренных гаек и винтов в вашем автомобиле? В этой статье рассказывается о тщательном процессе проверок и инспекций качества, благодаря которым ваш автомобиль...
Вы когда-нибудь задумывались, что помогает электродвигателю работать без перегрева? Понимание безопасных рабочих температур для электродвигателей имеет решающее значение для их долговечности и производительности. В этой статье...
Задумывались ли вы когда-нибудь об увлекательном мире литья? Этот древний, но постоянно развивающийся производственный процесс формирует нашу повседневную жизнь бесчисленными способами. В этой статье мы рассмотрим...
Вы когда-нибудь задумывались о том, как плавно работают шестеренки в вашем автомобиле или самолете? В этой статье мы расскажем о ведущих производителях шестеренок, которые формируют будущее машиностроения. Вы узнаете...