Изучение типов и принципов работы двигателей в производстве
Представьте себе мир без гула моторов - ни автомобилей, ни бытовой техники, ни промышленных машин. Моторы преобразуют электрическую энергию в механическую, приводя в движение все - от игрушек до производственных гигантов. В этой статье мы рассмотрим различные типы двигателей, принципы их работы и области применения. Поняв эти основы, вы получите представление о том, как эти незаменимые устройства формируют нашу современную жизнь и какие инновации они внедряют в промышленный ландшафт.
Почти половина мирового энергопотребления приходится на двигатели, поэтому эффективное использование двигателей является одной из наиболее действенных мер по решению глобальных энергетических проблем.
Двигатель - это устройство, преобразующее электрическую энергию в механическую. В нем используется катушка с питанием (обмотка статора) для создания вращающегося магнитного поля, которое воздействует на ротор (например, короткозамкнутый алюминиевый каркас) для создания вращающегося магнитного момента.
В зависимости от типа используемого источника питания двигатели делятся на двигатели постоянного тока (DC) и двигатели переменного тока (AC). Большинство двигателей в энергосистеме - это двигатели переменного тока, которые могут быть как синхронными, так и асинхронными (скорость вращения магнитного поля статора двигателя не синхронизирована со скоростью вращения ротора).
Двигатель состоит в основном из статора и ротора. Направление движения проводника с питанием в магнитном поле связано с направлением тока и направлением линий магнитного поля. Принцип работы двигателя заключается в воздействии магнитного поля на ток, что приводит к его вращению.
Управление двигателем - это управление запуском, ускорением, работой, замедлением и остановкой двигателя. Существуют различные требования и цели в зависимости от типа двигателя и условий, в которых он используется. Для двигателей управление двигателем позволяет достичь таких целей, как быстрый запуск, быстрое реагирование, высокий КПД, высокий крутящий момент и высокая перегрузочная способность.
Упоминаемые здесь стандартные двигатели, серводвигатели, шаговые двигатели и серводвигатели относятся к микромоторам постоянного тока, с которыми мы часто сталкиваемся. Двигатель, также известный как "мотор", относится к устройству с электромагнитной индукцией, которое обеспечивает преобразование или передачу электромагнитной энергии в соответствии с законом электромагнитной индукции Фарадея.
Двигатель, также известный как "электрическая машина", обозначается в силовой цепи английской буквой "M" (ранее обозначалась "D"). Его основная функция - создание вращающего момента в качестве источника энергии для электроприборов или различных машин. Генератор обозначается на схеме буквой "G".
1. Типы двигателей
Как правило, двигателями называют устройства, преобразующие силу, возникающую при протекании электрического тока в магнитном поле, во вращательное движение, а в более широком смысле - и в линейное.
Двигатели можно разделить на две категории в зависимости от источника питания: Двигатели постоянного тока и двигатели переменного тока.
Их также можно условно разделить по принципу вращения, за некоторыми исключениями для специальных типов двигателей.
(1) Двигатель постоянного тока
Щеточный двигатель
Широко распространенный щеточный двигатель обычно называют двигателем постоянного тока. Ротор вращается за счет переключения тока через электроды, называемые "щетками" (со стороны статора) и "коммутатором" (со стороны якоря).
Бесщеточный двигатель постоянного тока
Этот двигатель не требует щеток или коммутатора, а использует коммутационные функции, такие как транзисторы, для переключения токов и вращения двигателя.
Шаговый двигатель
Этот двигатель работает синхронно с импульсным питанием, поэтому его также называют импульсным. Его особенностью является простота и точность позиционирования.
(2) Двигатель переменного тока
Асинхронный двигатель
Переменный ток заставляет статор создавать вращающееся магнитное поле, которое заставляет ротор создавать индукционный ток и вращаться под его воздействием.
Синхронный двигатель
Переменный ток создает вращающееся магнитное поле, и ротор с магнитным полем вращается за счет притяжения. Скорость вращения синхронизируется с частотой питания.
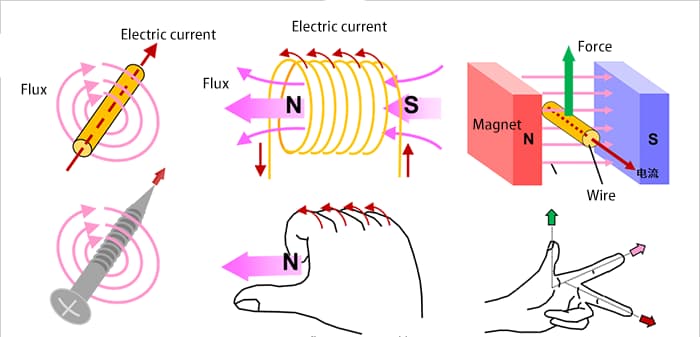
Об электрическом токе, магнитных полях и силе
Прежде всего, чтобы облегчить объяснение принципов работы двигателя, давайте рассмотрим основные законы электрического тока, магнитного поля и силы. Хотя это может вызвать чувство ностальгии, эти знания легко забыть, если не часто использовать магнитные компоненты.
Мы будем использовать рисунки и формулы, чтобы проиллюстрировать это.
Схема вращения двигателя
Когда проволочная петля представляет собой прямоугольник, нам нужно учесть силу, действующую на ток.
Сила F, действующая на стороны a и c, может быть рассчитана по следующей формуле:
При этом возникает вращающий момент вокруг центральной оси.
Например, если рассматривать состояние, когда угол поворота составляет всего θ, то сила, действующая на b и d под прямым углом, равна sinθ. Поэтому крутящий момент Ta на стороне a можно выразить следующей формулой:
Таким же образом, учитывая сторону c, крутящий момент удваивается и создает момент, рассчитываемый по следующей формуле:
Поскольку площадь прямоугольника равна S = h x l, подставив ее в приведенную выше формулу, получим следующие результаты:
Эта формула применима не только к прямоугольникам, но и к другим распространенным формам, таким как круги. В двигателях используется этот принцип.
Стандартный двигатель
Стандартный двигатель, часто встречающийся в таких предметах повседневного обихода, как электрические игрушки и электробритвы, обычно представляет собой щеточный двигатель постоянного тока. Он характеризуется высокой скоростью и низким крутящим моментом, а для его работы требуется всего два контакта. При подключении к положительной и отрицательной клеммам аккумулятора двигатель начинает вращаться. При обратном подключении двигатель начинает вращаться в противоположном направлении.
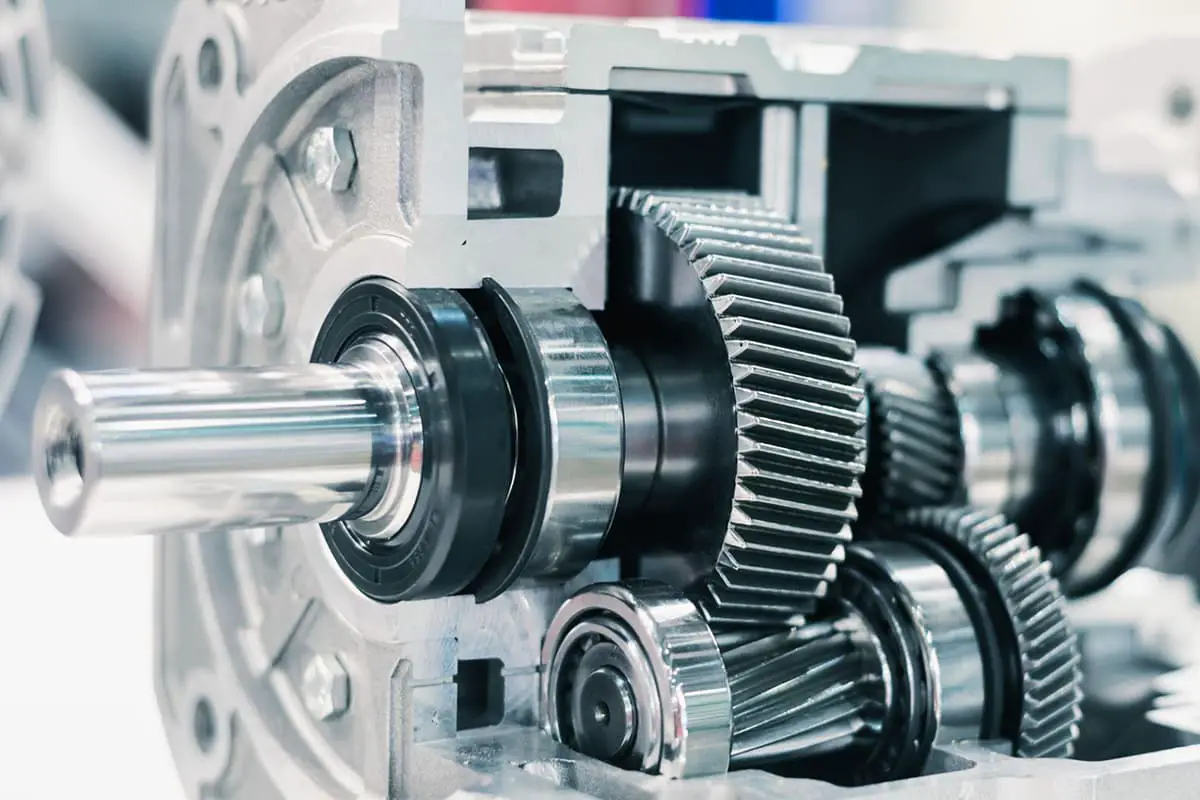
Двигатель с редуктором
Редукторный двигатель - это стандартный двигатель, оснащенный редуктором. Такая конструкция снижает скорость вращения и увеличивает крутящий момент, расширяя спектр практического применения стандартного двигателя.
Серводвигатель
Серводвигатель состоит в основном из корпуса, печатной платы, двигателя без сердечника, шестерен и датчика положения. Он работает, получая сигнал от приемника на серводвигатель. Встроенная микросхема определяет направление вращения и приводит в движение безъядерный двигатель, чтобы он начал вращаться.
Движение передается на поворотный рычаг через понижающие шестерни, а датчик положения одновременно посылает обратные сигналы, чтобы проверить, достигнуто ли заданное положение. Датчик положения - это, по сути, переменный резистор, который изменяет сопротивление при вращении серводвигателя. Определив эти значения сопротивления, можно определить угол поворота.
Спецификации предоставлены производители серводвигателей обычно включают размеры (мм), крутящий момент (кг/см), скорость (сек/60°), испытательное напряжение (В) и вес (г). Единицей измерения крутящего момента является кг/см, показывающий, сколько килограммов можно поднять при длине рычага 1 см.
Это концепция рычага, поэтому чем длиннее рычаг, тем меньше крутящий момент. Единица измерения скорости - сек/60°, что означает время, необходимое серводвигателю для поворота на 60°.
Шаговый двигатель
Шаговый двигатель - это элемент управления с открытым контуром, который преобразует электрические импульсные сигналы в угловое или линейное перемещение. В условиях отсутствия перегрузки скорость и положение остановки двигателя зависят исключительно от частоты и количества импульсных сигналов, независимо от изменения нагрузки.
Когда шаговый драйвер получает импульсный сигнал, он приводит шаговый двигатель во вращение на фиксированный угол, известный как "угол шага", в заданном направлении. Вращение происходит с фиксированным угловым шагом. Количество импульсов можно регулировать, чтобы управлять угловым перемещением, добиваясь точного позиционирования. Аналогично, частота импульсов может использоваться для управления скоростью вращения и ускорением двигателя, что позволяет регулировать скорость.
Серводвигатель, также известный как исполнительный двигатель, служит исполнительным устройством в системах автоматического управления, преобразуя полученные электрические сигналы в угловое перемещение или угловую скорость на валу двигателя.
Они бывают двух основных категорий: серводвигатели постоянного тока (DC) и переменного тока (AC). Основной характеристикой этих двигателей является отсутствие явления самовращения при нулевом напряжении сигнала и равномерное уменьшение скорости вращения при увеличении крутящего момента.
Серводвигатели в основном используют импульсы для позиционирования. По сути, серводвигатель поворачивается на соответствующий импульсу угол за каждый полученный импульс, тем самым обеспечивая перемещение. Поскольку серводвигатель сам по себе обладает способностью излучать импульсы, он излучает соответствующее количество импульсов на каждый градус поворота.
Таким образом, формируется система, реагирующая на полученные импульсы, или "замкнутый контур". Таким образом, система знает, сколько импульсов было отправлено на серводвигатель и сколько импульсов было получено обратно. Следовательно, она может очень точно управлять вращением двигателя, обеспечивая точное позиционирование с точностью до 0,001 мм.
Серводвигатели делятся на серводвигатели переменного тока и серводвигатели постоянного тока.
Серводвигатели переменного тока также подразделяются на асинхронные серводвигатели переменного тока и синхронные серводвигатели переменного тока.
Серводвигатели постоянного тока делятся на щеточные и бесщеточные. Щеточные двигатели недороги, просты по конструкции, создают высокий пусковой момент, имеют широкий диапазон регулирования скорости и просты в управлении. Они требуют технического обслуживания, но это неудобно (например, замена щеток), к тому же они создают электромагнитные помехи и имеют особые требования к окружающей среде. Поэтому они подходят для чувствительных к стоимости общепромышленных и гражданских применений.
2. Как вращаются двигатели?
1) Двигатели вращаются с помощью магнитов и магнитной силы
Вокруг постоянного магнита с вращающимся валом,
① Вращение магнита (для создания вращающегося магнитного поля),
② Согласно принципу притяжения противоположных полюсов и отталкивания одинаковых полюсов между полюсом N и полюсом S,
③ Магнит с вращающимся валом будет вращаться.
Это основной принцип вращения двигателя.
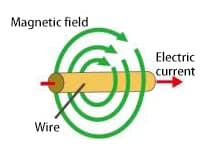
Прохождение тока по проводу создает вокруг него вращающееся магнитное поле (магнитную силу), которое заставляет магнит вращаться.
Фактически, это то же самое рабочее состояние, которое было описано ранее.
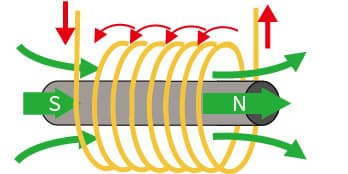
Кроме того, если провод намотан на катушку, магнитные силы объединяются, образуя большой поток магнитного поля (магнитный поток), который создает N- и S-полюса.
Вставка железного сердечника в проволоку в форме катушки облегчает прохождение силовых линий магнитного поля и создает более мощную магнитную силу.
2) Практичные вращающиеся двигатели
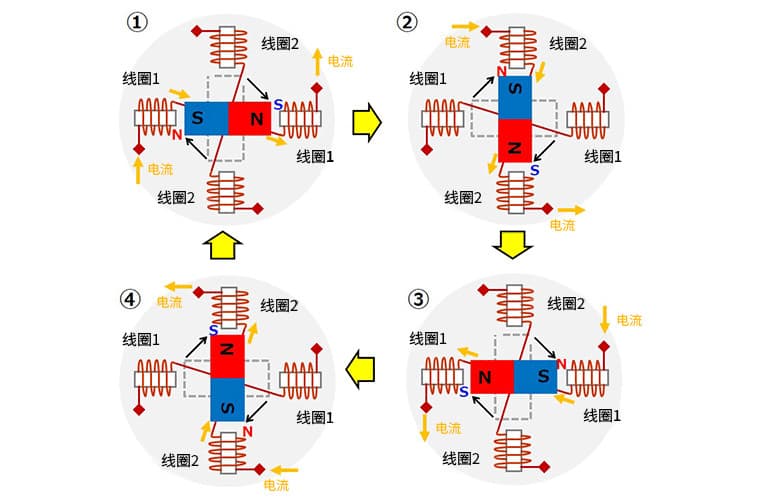
Здесь мы представим практический метод использования трехфазного переменного тока и катушек для создания вращающегося магнитного поля в качестве вращающегося двигателя.
(Трехфазный переменный ток - это сигнал переменного тока с разностью фаз 120°).
Комбинированное магнитное поле в указанном состоянии ① соответствует рисунку ① ниже.
Комбинированное магнитное поле в указанном состоянии ② соответствует рисунку ② ниже.
Комбинированное магнитное поле в указанном состоянии ③ соответствует рисунку ③ ниже.
Как упоминалось выше, катушка, намотанная на железный сердечник, разделена на три фазы: катушка U-фазы, катушка V-фазы и катушка W-фазы расположены с интервалом 120°.
Катушка с высоким напряжением создает N-полюс, а катушка с низким напряжением - S-полюс.
Каждая фаза изменяется в соответствии с синусоидой, поэтому полярность (полюс N, полюс S) и магнитное поле (магнитная сила) каждой катушки будут меняться.
В это время, если мы посмотрим на катушку, которая создает N-полюс, она последовательно переходит от U-фазной катушки к V-фазной, от W-фазной к U-фазной, вызывая вращение.
3. Структура малых двигателей
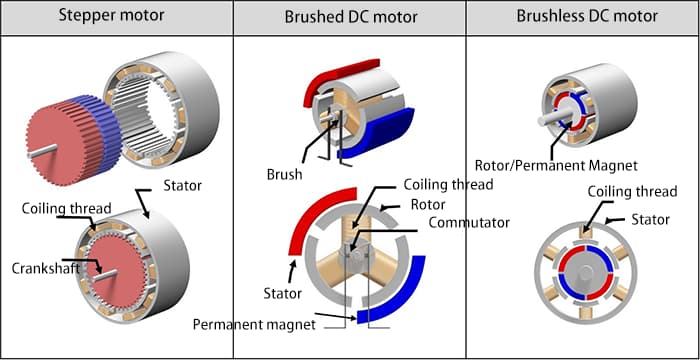
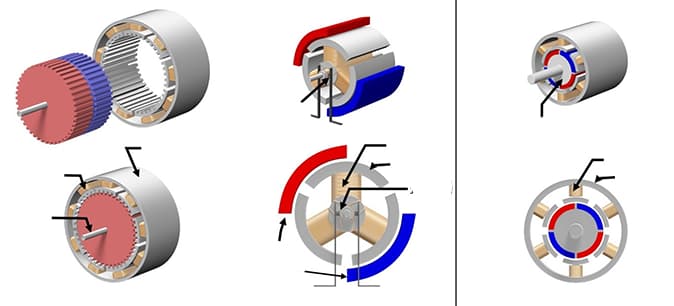
На следующем рисунке показаны примерные конструкции и сравнение трех типов двигателей: шагового двигателя, двигателя постоянного тока с щеточным механизмом и бесщеточного двигателя постоянного тока.
Основными компонентами этих двигателей являются катушки, магниты и роторы, и они классифицируются как катушечные и магнитные из-за их различных типов.
Ниже приведено структурное объяснение, связанное с примером диаграммы. Поскольку могут существовать и другие структуры, если мы разделим их более тонко, пожалуйста, поймите, что эта статья описывает общую структуру.
В показанном здесь шаговом двигателе катушка закреплена на внешней стороне, а магнит вращается на внутренней.
В показанном здесь щеточном двигателе постоянного тока магнит закреплен на внешней стороне, а катушка вращается на внутренней. Щетки и коммутатор отвечают за подачу энергии в катушку и изменение направления тока.
В показанном здесь бесщеточном двигателе катушка закреплена на внешней стороне, а магнит вращается на внутренней.
Из-за различных типов двигателей, даже если основные компоненты одинаковы, конструкция может отличаться. Подробное объяснение будет дано в каждом разделе.
4. Щеточный двигатель
Структура щеточного двигателя
Ниже показан внешний вид щеточного двигателя постоянного тока, часто используемого в моделях, а также покомпонентная схема типичного двухполюсного (2 магнита) и трехслотового (3 катушки) двигателя. Многие люди могут иметь опыт разборки двигателей и извлечения магнитов.
Как видно, постоянный магнит щеточного двигателя постоянного тока неподвижен, а катушки могут вращаться вокруг внутреннего центра двигателя. Неподвижная сторона называется "статор", а вращающаяся - "ротор".
Ниже приведена схема, отражающая концепцию строения двигателя.
По периферии вращающейся центральной оси расположены три коммутатора (изогнутые металлические пластины для переключения тока). Чтобы они не соприкасались друг с другом, коммутаторы расположены с интервалом в 120 градусов (360 градусов ÷ 3). Коммутаторы вращаются вместе с вращением оси.
Каждый коммутатор соединен с одним концом катушки и другим концом катушки, и три коммутатора и три катушки образуют цепь в целом (в форме кольца).
Две щетки закреплены под углом 0° и 180° для контакта с коммутаторами. Внешний источник постоянного тока подключается к щеткам, и ток течет по пути щетка → коммутатор → катушка → щетка.
Принцип работы щеточного двигателя.
① Вращение против часовой стрелки из исходного состояния
В исходном состоянии катушка A находится вверху, а источник питания подключен к щеткам с левой (+) и правой (-) сторонами. Большой ток течет от левой щетки через коммутатор к катушке A, и верхняя (внешняя) сторона катушки A становится структурой с S-образными полюсами.
Поскольку половина тока, протекающего через катушку A от левой щетки к катушкам B и C, направлена в противоположную сторону от катушки A, внешняя сторона катушек B и C становится более слабым полюсом N (на рисунке обозначен меньшими буквами).
Магнитные поля, создаваемые в этих катушках, а также отталкивание и притяжение между магнитами заставляют катушку вращаться против часовой стрелки.
② Дальнейшее вращение против часовой стрелки
Если предположить, что катушка A находится в состоянии вращения против часовой стрелки на 30 градусов, то правая щетка контактирует с двумя коммутаторами.
Ток в катушке A продолжает течь от левой щетки через правую, и внешняя сторона катушки A остается S-образным полюсом.
Через катушку B течет тот же ток, что и в катушке A, и внешняя сторона катушки B становится более сильным N-полюсом.
Поскольку оба конца катушки C замкнуты щетками, ток не течет, и магнитное поле не создается.
Даже в этом случае на катушку действует сила, направленная против часовой стрелки.
От ③ до ④ верхний виток продолжает подвергаться действию силы, направленной влево, а нижний виток - вправо, продолжая вращаться против часовой стрелки.
Каждый раз, когда катушка поворачивается на 30 градусов в состояния ③ и ④, внешняя сторона катушки становится S-полюсом, если катушка расположена выше центральной горизонтальной оси, и N-полюсом, если катушка расположена ниже нее, многократно выполняя это движение.
Другими словами, на верхнюю катушку неоднократно действует сила, направленная влево, а на нижнюю катушку - сила, направленная вправо (обе против часовой стрелки). Это заставляет ротор постоянно вращаться против часовой стрелки.
Если источник питания подключен к противоположным левой (-) и правой (+) щеткам, катушка генерирует магнитное поле в противоположном направлении, и направление силы, приложенной к катушке, меняется на противоположное, вызывая вращение по часовой стрелке.
Кроме того, при отключении питания ротор щеточного двигателя перестает вращаться, поскольку отсутствует магнитное поле, поддерживающее его вращение.
5. Трехфазный полноволновый бесщеточный двигатель
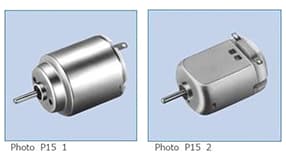
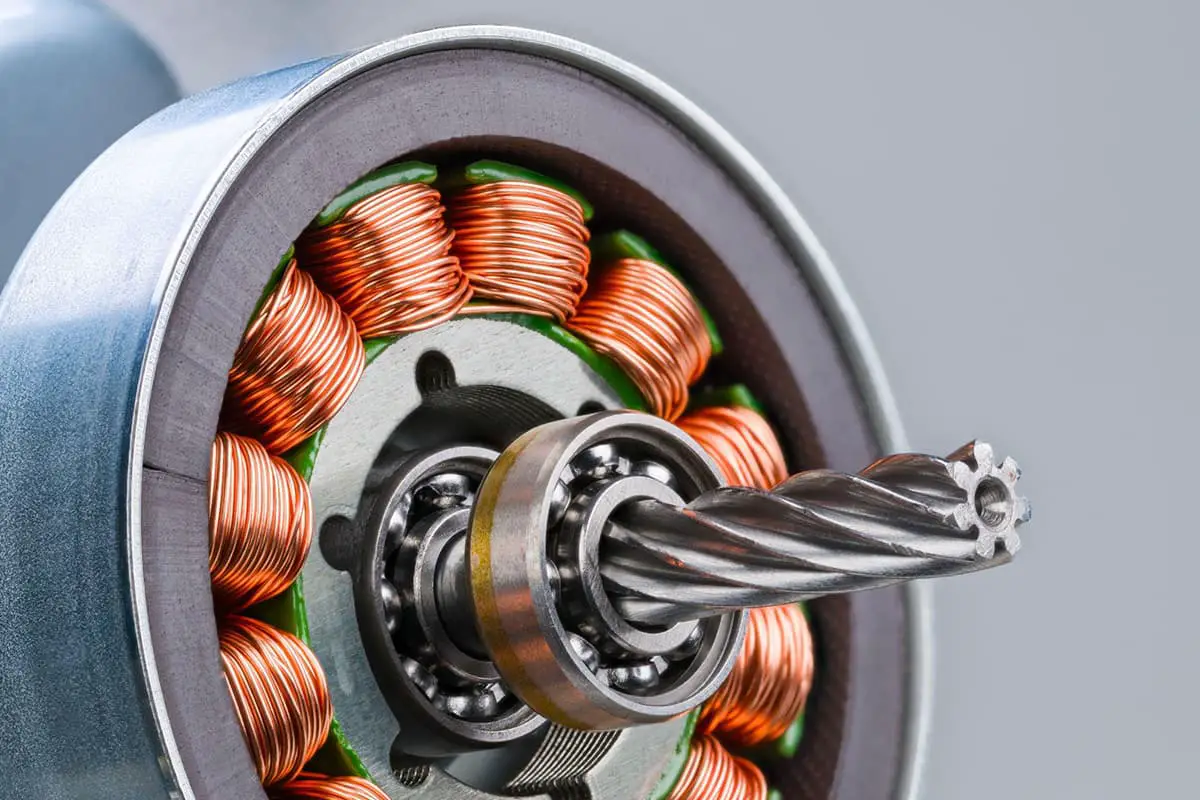
Внешний вид и структура трехфазного полноволнового бесщеточного двигателя
На следующем рисунке показан пример внешнего вида и структуры бесщеточного двигателя.
Слева - пример шпиндельного двигателя для вращения дисков в устройстве воспроизведения дисков. Всего здесь девять катушек, состоящих из трех фаз, умноженных на три.
Справа показан пример шпиндельного двигателя для устройства FDD, который имеет 12 катушек (три фазы умножить на четыре). Катушки закреплены на печатной плате и намотаны вокруг железного сердечника.
Дискообразный компонент справа от катушки - это ротор с постоянным магнитом. Внешний край выполнен из постоянного магнита, а вал ротора вставлен в центр катушки и охватывает ее часть. Постоянный магнит вращается вокруг внешнего края катушки.
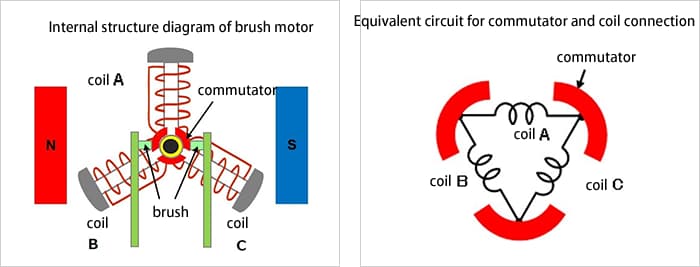
Внутренняя структурная схема трехфазного полноволнового бесщеточного двигателя и эквивалентная схема подключения катушек.
Ниже приведены упрощенные схемы внутренней структуры и эквивалентной схемы подключения катушек.
На упрощенной схеме показан двухполюсный (2 магнита) трехслотовый (3 катушки) двигатель с простой конструкцией. Он похож на щеточный конструкция двигателя с тем же количеством полюсов и пазов, но сторона катушки неподвижна, а магниты могут вращаться. Конечно, здесь нет щеток.
В этом случае катушки соединены в Y-образную конфигурацию, а для подачи тока в катушки используются полупроводниковые компоненты. Поток тока регулируется в зависимости от положения вращающихся магнитов.
В этом примере для определения положения магнитов используются элементы Холла. Элементы Холла размещены между катушками и определяют напряжение, генерируемое напряженностью магнитного поля, которое используется в качестве информации о положении. На изображении шпиндельного двигателя для устройства FDD, представленном ранее, элементы Холла также видны между катушками для определения положения (над катушками).
Элементы Холла - это хорошо известные магнитные датчики, которые преобразуют величину магнитного поля в величину напряжения и отображают направление магнитного поля положительным или отрицательным напряжением.
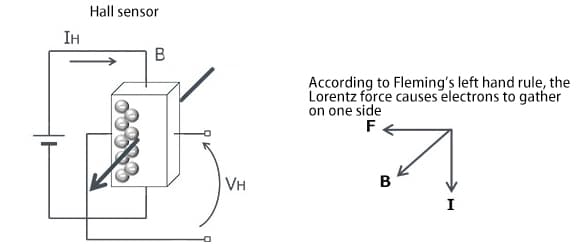
Ниже приведена схема, иллюстрирующая эффект Холла.
Элемент Холла использует явление, согласно которому "при прохождении тока IH через полупроводник и магнитного потока B, направленного перпендикулярно току, возникает напряжение VH в направлении, перпендикулярном как току, так и магнитному полю". Американский физик Эдвин Герберт Холл открыл это явление и назвал его "эффектом Холла". Генерируемое напряжение VH выражается следующей формулой:
VH = (KH / d)・IH・B
※KH: коэффициент Холла, d: толщина поверхности проникновения магнитного потока
Как видно из формулы, чем больше ток, тем выше напряжение. Эта характеристика обычно используется для определения положения ротора (магнита).
Принцип вращения трехфазных полноволновых бесщеточных двигателей
Принцип вращения бесщеточного двигателя будет объяснен в шагах с 1 по 6. Для облегчения понимания постоянный магнит был упрощен с круглой до прямоугольной формы.
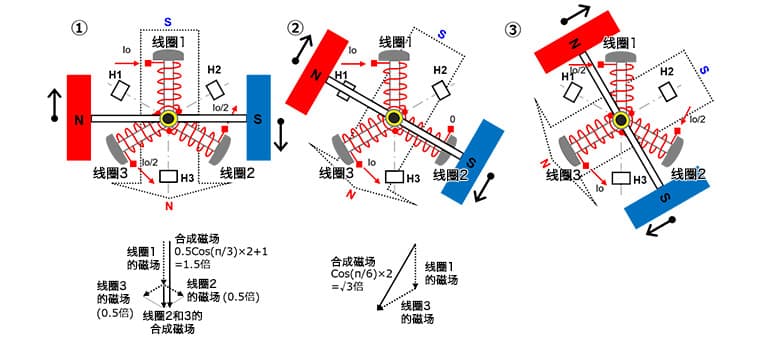
① В трехфазной системе катушек катушка 1 закреплена в положении "12 часов", катушка 2 - в положении "4 часа", а катушка 3 - в положении "8 часов" на циферблате часов. Двухполюсный постоянный магнит, у которого N-полюс расположен слева, а S-полюс - справа, может вращаться.
Пропустите ток Io через катушку 1, чтобы создать магнитное поле S-полюса на внешней стороне катушки. Пропустите ток Io/2 через катушки 2 и 3, чтобы создать магнитное поле с полюсом N на внешней стороне катушки.
При векторном объединении магнитных полей катушек 2 и 3 возникает магнитное поле с N-полюсом, направленное вниз. Это магнитное поле в 0,5 раза больше магнитного поля, создаваемого током Io, проходящим через одну катушку, а при добавлении к магнитному полю катушки 1 оно становится в 1,5 раза сильнее. В результате возникает комбинированное магнитное поле, перпендикулярное постоянному магниту, которое создает максимальный крутящий момент и заставляет постоянный магнит вращаться по часовой стрелке.
Поскольку ток через катушку 2 уменьшается, а ток через катушку 3 увеличивается в зависимости от положения вращения, комбинированное магнитное поле также вращается по часовой стрелке, заставляя постоянный магнит продолжать вращаться.
② В повернутом на 30 градусов состоянии через катушку 1 проходит ток Io, делая ток в катушке 2 нулевым и заставляя ток Io вытекать из катушки 3.
Внешняя сторона катушки 1 становится S-полюсом, а внешняя сторона катушки 3 - N-полюсом. При векторном объединении создаваемое магнитное поле в √3 (≈1,72) раза сильнее, чем магнитное поле, создаваемое током Io, проходящим через одну катушку. Это также создает комбинированное магнитное поле, перпендикулярное постоянному магниту, который вращается по часовой стрелке.
При изменении положения вращения ток, протекающий в катушку 1, уменьшается, ток, протекающий в катушку 2, начинается с нуля и увеличивается, а ток, вытекающий из катушки 3, увеличивается до Io. В результате объединенное магнитное поле также вращается по часовой стрелке, заставляя постоянный магнит продолжать вращаться.
※ Если предположить, что ток каждой фазы представляет собой синусоиду, то значение тока здесь равно Io × sin(π⁄3) = Io × √3⁄2. Благодаря векторной комбинации магнитных полей общая величина магнитного поля в 1,5 раза превышает магнитное поле, создаваемое одной катушкой.
Когда каждая фаза тока представляет собой синусоиду, независимо от положения постоянного магнита, величина векторного комбинированного магнитного поля всегда в 1,5 раза больше магнитного поля, создаваемого одной катушкой, и магнитное поле перпендикулярно магнитному полю постоянного магнита под углом 90 градусов.
③ При продолжении вращения на 30 градусов через катушку 1 течет ток Io/2, через катушку 2 течет ток Io/2, а из катушки 3 вытекает ток Io.
Внешняя сторона катушки 1 становится полюсом S, внешняя сторона катушки 2 также становится полюсом S, а внешняя сторона катушки 3 становится полюсом N. При векторном объединении создаваемое магнитное поле в 1,5 раза превышает магнитное поле, создаваемое при прохождении тока Io через одну катушку (как и в шаге 1). Кроме того, комбинированное магнитное поле создается перпендикулярно магнитному полю постоянного магнита под углом 90 градусов и вращается по часовой стрелке.
④-⑥
Продолжайте вращать таким же образом, как в шагах 1-3.
Таким образом, если ток, протекающий в катушках, постоянно переключается в зависимости от положения постоянного магнита, то постоянный магнит будет вращаться в фиксированном направлении. Аналогично, если заставить ток течь в противоположном направлении и изменить направление комбинированного магнитного поля, то вращение будет происходить против часовой стрелки.
На следующей диаграмме показан ток, протекающий через каждую катушку для каждого шага от 1 до 6.
Благодаря приведенному выше объяснению, теперь можно понять взаимосвязь между изменениями тока и вращением.
6. Шаговый двигатель
Шаговый двигатель - это тип двигателя, который может точно управляться по углу поворота и скорости путем синхронизации с импульсным сигналом. Шаговые двигатели также известны как "импульсные двигатели".
Благодаря своей способности достигать точного позиционирования без использования датчиков положения и только с открытым контуром управления, шаговые двигатели широко используются в оборудовании, требующем позиционирования.
Структура шагового двигателя (двухфазный биполярный)
На следующих изображениях слева направо показаны примеры внешнего вида шагового двигателя, схема его внутреннего устройства и концептуальная диаграмма его структуры.
На примере внешнего вида показаны шаговые двигатели типов HB (гибридные) и PM (с постоянными магнитами). На схеме в центре также показана структура обоих типов - HB и PM.
Шаговый двигатель имеет структуру, в которой катушки неподвижны, а постоянный магнит вращается. Концептуальная схема внутренней структуры шагового двигателя справа является примером двигателя с ПМ с двухфазными (двумя комплектами) катушками.
В примере базовой структуры шагового двигателя катушки расположены снаружи, а постоянный магнит - внутри. Помимо двухфазного типа, существуют типы с большим количеством фаз, такие как трехфазный и пятифазный.
Некоторые шаговые двигатели имеют различную структуру, но для объяснения основного принципа работы шаговых двигателей в этой статье представлен шаговый двигатель с базовой структурой из неподвижных катушек и вращающихся постоянных магнитов.
Следующая диаграмма используется для объяснения основного принципа работы шагового двигателя. Это пример возбуждения каждой фазы (одного набора катушек) двухфазной биполярной катушки, показанной на предыдущем изображении, при условии изменения состояния с ① на ④. Катушки состоят из катушек 1 и 2, а стрелка тока указывает направление протекания тока.
①
Электрический ток течет с левой стороны катушки 1 и выходит с правой.
Не допускайте протекания электрического тока через катушку 2.
В этот момент внутренняя сторона левой катушки 1 становится северной, а внутренняя сторона правой катушки 1 - южной.
В результате средний постоянный магнит притягивается магнитным полем катушки 1 и останавливается в состоянии, когда левая сторона находится на юге, а правая - на севере.
②
Остановите ток в катушке 1 и позвольте току течь из верхней части катушки 2 и выходить из нижней.
Внутренняя часть верхней катушки 2 становится севером, а внутренняя часть нижней катушки 2 - югом.
Постоянный магнит притягивается своим магнитным полем, поворачивается на 90° по часовой стрелке и останавливается.
③
Остановите ток в катушке 2 и позвольте току течь с правой стороны катушки 1 и выходить с левой стороны.
Внутренняя часть левой катушки 1 становится южной, а внутренняя часть правой катушки 1 - северной.
Постоянный магнит притягивается своим магнитным полем, поворачивается еще на 90° по часовой стрелке и останавливается.
④
Остановите ток в катушке 1 и позвольте току течь из нижней части катушки 2 и выходить из верхней.
Внутренняя часть верхней катушки 2 становится южной, а внутренняя часть нижней катушки 2 - северной.
Постоянный магнит притягивается своим магнитным полем, поворачивается еще на 90° по часовой стрелке и останавливается.
Переключая ток, протекающий через катушки, в порядке от ① до ④ с помощью электронных схем, можно поворачивать шаговый двигатель. В данном примере каждое переключение будет поворачивать шаговый двигатель на 90°.
Кроме того, при непрерывном прохождении тока через определенную катушку шаговый двигатель может сохранять свое остановленное положение и иметь удерживающий момент. Стоит отметить, что изменение порядка протекания тока через катушки может заставить шаговый двигатель вращаться в противоположном направлении.
Не забывайте, что делиться - значит заботиться! : )
Поделиться
Facebook
Twitter
LinkedIn
Reddit
VK
Электронная почта
Печать
Автор
Шейн
Основатель MachineMFG
Как основатель MachineMFG, я посвятил более десяти лет своей карьеры металлообрабатывающей промышленности. Мой обширный опыт позволил мне стать экспертом в области производства листового металла, механической обработки, машиностроения и станков для обработки металлов. Я постоянно думаю, читаю и пишу об этих предметах, постоянно стремясь оставаться на переднем крае своей области. Позвольте моим знаниям и опыту стать преимуществом для вашего бизнеса.
Вы когда-нибудь задумывались, что помогает электродвигателю работать без перегрева? Понимание безопасных рабочих температур для электродвигателей имеет решающее значение для их долговечности и производительности. В этой статье...
В стремительно развивающемся мире промышленной автоматизации серводвигатели - это невоспетые герои, обеспечивающие точность и эффективность. Но в условиях, когда бесчисленные производители борются за внимание, как узнать, кто из них...
Вы когда-нибудь задумывались, как экскаваторы и другие тяжелые машины выполняют свои мощные задачи? В этой статье мы рассмотрим увлекательные различия между гидравлическими насосами и моторами. Вы узнаете, как...
Вы когда-нибудь задумывались, как машины добиваются точных движений? В этом блоге мы погрузимся в увлекательный мир режимов управления серводвигателями. От импульсного до аналогового управления, мы изучим, как работает каждый из методов...
Вы когда-нибудь задумывались, как поезда могут парить над рельсами или как роботы достигают точных движений? Эта статья откроет вам увлекательный мир линейных двигателей, объяснит их принципы работы, типы и уникальные преимущества.....
Вы когда-нибудь задумывались, как выбрать идеальный двигатель для вашего проекта? Ключевым моментом является понимание типов двигателей - постоянного тока, асинхронных и синхронных - и их уникальных преимуществ. В этой статье мы рассмотрим...
Почему подшипники двигателя так сильно нагреваются и что с этим можно сделать? В этой статье мы рассмотрим причины нагрева подшипников электродвигателей, начиная от чрезмерных нагрузок и заканчивая плохим...
Что происходит, когда нарушается магнитный баланс двигателя? Одностороннее магнитное притяжение возникает из-за несбалансированного воздушного зазора в двигателях, вызывая неравномерные усилия, которые деформируют подшипники двигателя. В этой статье...
Как подшипники влияют на эффективность и долговечность цилиндрических мотор-редукторов? В этой статье мы рассмотрим важнейшую роль подшипников, обсудим их выбор и расположение, а также то, как они справляются с...