Представьте себе мир, в котором машины могут видеть, чувствовать и реагировать на окружающую обстановку с непревзойденной точностью. Таковы перспективы новых сенсорных технологий в машиностроении. Интегрируя передовые датчики в машины, мы стоим на пороге преобразования отраслей промышленности - от производства до здравоохранения - за счет повышения эффективности, точности и адаптивности. В этой статье вы узнаете, как эти передовые датчики совершают революцию в данной области, а также познакомитесь с их различными применениями и преимуществами. Приготовьтесь открыть для себя будущее интеллектуального оборудования.
Восприятие позы достигается благодаря совместному использованию бесконтактных датчиков положения и датчиков ориентации для отслеживания изменений пространственного положения и ориентации объекта.
1) Бесконтактные датчики положения
В отличие от контактных датчиков положения, бесконтактные датчики положения разрабатываются и производятся с использованием таких технологий, как эффект Холла, магнитосопротивление, принципы электромагнитной индукции и емкостные принципы. Эти датчики не испытывают относительного трения, что увеличивает срок их службы.
В течение последних нескольких десятилетий потенциометры использовались для измерения положения и угла благодаря простоте конструкции, отработанной технологии производства и низкой стоимости.
Однако присущие им ограничения также сдерживали их развитие. Известные международные производители автозапчастей начали проводить исследования и разработки в области бесконтактных датчиков положения более десяти лет назад.
2) Индуктивные датчики положения
Индуктивные датчики положения работают по принципу электромагнитной индукции, которая генерирует наведенный ток в проводнике, являющемся частью замкнутого контура, когда он движется навстречу силовым линиям магнитного поля.
Как и другие датчики угла, они состоят из статора и ротора. Как правило, существует два типа индуктивных датчиков положения.
Первый тип - катушечный, для намотки индуктивной катушки требуется большой железный сердечник. Этот тип имеет большие размеры, сложную структуру и требует наличия внутренней схемы формирования сигнала.
Несмотря на высокую точность измерения, он относительно дорог и в настоящее время используется в основном для измерения крутящего момента в системах EPS, причем изделия этого типа предлагаются как KOYO, так и NSK.
Второй тип - с планарной катушкой. Статор индуктивного датчика с плоской катушкой состоит из плоских возбуждающей и приемной катушек, а также электронных компонентов, включая стандартную печатную плату и ASIC.
Ротор изготавливается из штампованного куска токопроводящей проволоки определенной геометрической формы (либо из токопроводящего материала, либо из компонентов печатной платы).
В настоящее время датчики положения, разработанные немецкой компанией Hella по технологии планарных катушечных датчиков положения, широко используются для обратной связи по углу наклона в педалях и приводах дроссельной заслонки.
Датчики положения с плоской катушкой имеют относительно простую конструкцию. Статор на печатной плате состоит из катушки возбуждения, трех индуктивных приемных катушек и других электронных компонентов обработки сигнала, а ротор представляет собой простую штампованную металлическую деталь.
Ключ к индуктивным датчикам положения лежит не в конструкции планарной графической катушки, а в технологии изготовления микросхем.
Блок обработки сигналов микросхемы принимает сигналы напряжения от катушки, выпрямляет и усиливает их, а также пропорционально выдает их в виде пар.
Выходные сигналы включают аналоговые сигналы, сигналы импульсной модуляции и шинные коммуникации. Они могут работать в диапазоне температур от -40 до +50 градусов Цельсия и выдерживать вибрации до 30g, демонстрируя отличную надежность, долговечность и влагостойкость.
Они также могут работать в различных формах электромагнитных полей. Производственные трудности индуктивных датчиков положения заключаются в уровне технологий химического травления планарных катушек и технологии упаковки пользовательского блока обработки сигнала.
Без использования заказных чипов стоимость была бы значительно выше.
Индуктивные датчики положения обладают следующими преимуществами: на них минимально влияют механические допуски, они не требуют настройки температурной компенсации, не нуждаются в дополнительных магнитных материалах и невосприимчивы к помехам от магнитных полей и электрических сигналов.
Они отвечают всем требованиям электромагнитной совместимости в автомобилях, измеряют углы до 360 градусов и даже больше и отличаются высокой гибкостью.
Они могут измерять как угловое, так и линейное перемещение. Датчики сохраняют точность в пределах 1% в течение всего срока службы и во всем диапазоне температур.
В электромеханических устройствах эта технология позволяет интегрировать датчики с другими электронными компонентами на одной печатной плате.
Простота конструкции датчиков Hella - одно из их главных достоинств, поскольку их интеграция в блоки управления не требует дополнительных корпусов или жгутов проводов. Это упрощает проводку и уменьшает количество разъемов, что еще больше повышает надежность.
3) Датчики высоты
Датчики положения - это высокопроизводительные трехмерные системы измерения позы движения, основанные на технологии MEMS.
Они включают в себя вспомогательные датчики движения, такие как трехосевые гироскопы, трехосевые акселерометры и трехосевые электронные компасы, которые выводят калиброванные данные об угловой скорости, ускорении и магнитном поле через встроенный маломощный ARM-процессор.
Система измеряет позу при движении, используя алгоритмы сенсорных данных, основанные на кватернионах, и выдает в реальном времени данные о трехмерной позе с нулевым смещением, представленные в кватернионах и углах Эйлера.
Датчики положения широко используются в изделиях и устройствах, требующих недорогих и высокодинамичных трехмерных измерений положения, таких как модели беспилотных летательных аппаратов, роботы, антенные платформы, концентрированная солнечная энергия, наземное и подводное оборудование, виртуальная реальность и анализ движения человека.
Гироскоп - это прибор, который регистрирует угловое движение вокруг одной или двух осей, ортогональных оси вращения, используя импульс быстро вращающегося тела и его чувствительной оболочки относительно инерциального пространства.
Устройства, выполняющие ту же функцию, но созданные на других принципах, также называются гироскопами. (Рисунок 1)
2. Гибкое зондирование
В настоящее время различные датчики широко используются во многих интеллектуальных устройствах обнаружения. Они нашли применение в таких областях, как промышленное производство, исследование океана, защита окружающей среды, медицинская диагностика, биоинженерия, космические разработки и "умные дома".
По мере роста требований информационного века постепенно растут ожидания от таких параметров работы, как объем, точность и стабильность измеряемой информации.
Это поставило новые задачи перед стандартными датчиками, особенно в части требований к измерениям газа, давления и влажности в особых условиях и при особых сигналах.
В ответ на растущее количество специальных сигналов и сред новые сенсорные технологии развиваются в следующих направлениях: разработка новые материалыВ рамках этого проекта будут разработаны новые технологии, новые процессы и инновационные датчики; интеграция и интеллектуальное обеспечение датчиков; миниатюризация аппаратных систем и компонентов сенсорных технологий; интеграция датчиков с другими дисциплинами.
В то же время существует потребность в датчиках, обладающих прозрачностью, гибкостью, растяжимостью, возможностью свободного сгибания или даже складывания, портативностью и удобством ношения. С развитием материалов для гибких подложек появились гибкие датчики, отвечающие всем этим тенденциям.
1) Характеристики гибких датчиков
Гибкие материалы, в отличие от жестких, обычно обладают такими свойствами, как мягкость, низкий модуль упругости и легкость деформации. К распространенным гибким материалам относятся поливиниловый спирт (PVA), полиэстер (PET), полиимид (PI), полиэтиленнафталат (PEN), бумажные листы и текстильные материалы.
Гибкие датчики - это датчики, изготовленные из таких гибких материалов, обладающих отличной гибкостью, растяжимостью и даже способностью свободно сгибаться или складываться.
Благодаря разнообразным конструктивным решениям их можно располагать в зависимости от условий измерения, что облегчает осмотр сложных объектов.
Эти новые гибкие датчики широко используются в различных областях, таких как электронная кожа, здравоохранение, электроника, электротехника, спортивное оборудование, текстиль, аэрокосмическая промышленность и мониторинг окружающей среды.
2) Классификация гибких датчиков
Гибкие датчики разнообразны и имеют различные способы классификации. В зависимости от назначения гибкие датчики включают в себя датчики давления, датчики газа (для обнаружения алкоголя), датчики влажности (для прогнозирования погоды), датчики температуры (как термометры), датчики деформации, магниторезистивные датчики и датчики теплового потока (для холодильников).
Классифицируясь по механизму обнаружения, гибкие датчики включают резистивные, емкостные, магнитопрессивные и индуктивные типы.
3) Общие гибкие датчики
(1) Гибкие газовые датчики
В гибких газовых сенсорах используются газочувствительные тонкопленочные материалы, расположенные на поверхности электрода и имеющие гибкую подложку.
Они характеризуются легкостью, гибкостью, способностью легко гнуться и потенциалом для крупномасштабного производства. Тонкопленочные материалы отличаются высокой чувствительностью и относительно простым процессом изготовления, что привлекло к ним большое внимание.
Это полностью удовлетворяет требованиям портативности и низкого энергопотребления газовых датчиков в специальных условиях, преодолевая традиционные ограничения газовых датчиков, такие как их недостаточная портативность, неполный диапазон измерений, малый масштаб и высокая стоимость. Они могут осуществлять простое и точное обнаружение газов NH, NO и этанола, что привлекает к ним широкое внимание.
(2) Гибкие датчики давления
Гибкие датчики давления широко используются в таких областях, как умная одежда, интеллектуальные виды спорта и роботизированная "кожа".
Поливинилиденфторид, силиконовый каучук и полиимид, используемые в качестве базовых материалов, широко применяются в производстве гибких датчиков давления.
Эти материалы отличаются от датчиков силы с металлическими тензорезисторами и обычных диффузионных датчиков давления с полупроводниковыми чипами n-типа превосходной гибкостью, проводимостью и пьезорезистивными характеристиками. (Рисунок 2)
Рисунок 2: Гибкий датчик давления
(3) Гибкий датчик влажности
Датчики влажности в основном бывают двух типов: резистивные и емкостные. Гигрометры, характеризующиеся наличием влагочувствительного слоя, нанесенного на подложку, испытывают изменения сопротивления и удельного сопротивления по мере поглощения водяного пара в воздухе на влагочувствительной пленке.
Это свойство может быть использовано для измерения влажности. Гигроскопические конденсаторы обычно изготавливаются из полимерных пленок, среди которых распространенными материалами являются полистирол, полиимид и бутират ацетата целлюлозы.
Датчики влажности быстро эволюционируют от простых гигроскопических компонентов к интегрированным, интеллектуальным и многопараметрическим устройствам обнаружения. Традиционные гигрометры с сухой и влажной луковицей или волосяные гигрометры уже не способны удовлетворить потребности современной науки.
Гибкие датчики влажности, благодаря своей низкой стоимости, низкому энергопотреблению, простоте изготовления и возможности интеграции в интеллектуальные системы, получили широкое распространение.
Материал основы для изготовления таких гибких датчиков влажности аналогичен другим гибким датчикам, и существует множество методов изготовления чувствительной к влажности пленки, включая нанесение покрытия методом окунания, спин-нанесение покрытия, трафаретную печать и струйную печать.
Гибкие сенсорные структуры универсальны и могут быть организованы в соответствии с требованиями условий измерения. Они могут удобно и точно измерять специальные среды и сигналы, решая проблемы миниатюризации, интеграции и интеллектуального развития датчиков.
Эти новые гибкие датчики играют важную роль в электронной коже, биомедицине, носимой электронике и аэрокосмической отрасли. Однако в настоящее время технологии подготовки таких материалов, как углеродные нанотрубки и графен, для гибких датчиков незрелы, и проблемы, связанные со стоимостью, областью применения и сроком службы, сохраняются.
Обычные гибкие подложки не являются термостойкими, что приводит к высоким напряжениям и слабой адгезии между гибкой подложкой и пленочным материалом. Методы сборки, компоновки, интеграции и упаковки гибких датчиков также нуждаются в дальнейшем совершенствовании.
4) Распространенные материалы для гибких датчиков
(1) Гибкие подложки
Чтобы удовлетворить потребности гибких электронных устройств, такие свойства, как легкость, прозрачность, гибкость, растяжимость, изоляция и коррозионная стойкость, стали ключевыми показателями для гибких подложек.
Среди множества вариантов гибких подложек полидиметилсилоксан (PDMS) занимает первое место. К его преимуществам относятся легкая доступность, стабильные химические свойства, прозрачность и хорошая термическая стабильность.
В частности, его свойство иметь ярко выраженные адгезивные и неадгезивные участки под ультрафиолетовым светом облегчает прилипание электронных материалов к его поверхности.
Многие гибкие электронные устройства достигают значительной изгибаемости за счет уменьшения толщины подложки; однако этот метод ограничен практически плоскими поверхностями подложки. В отличие от этого, растягивающиеся электронные устройства могут полностью прилипать к сложным и неровным поверхностям.
В настоящее время обычно существует две стратегии достижения растяжимости носимых датчиков.
Первый метод заключается в непосредственном приклеивании тонких проводящих материалов с низким модулем Юнга к гибкой подложке; второй метод заключается в использовании растягивающихся проводников для сборки устройств, которые обычно готовятся путем смешивания проводящих материалов с эластичной основой.
(2) Металлические материалы
Металлические материалы, обычно состоящие из таких проводящих материалов, как золото, серебро и медь, используются в основном для изготовления электродов и проводников.
В современных процессах печати проводящих материалов часто используются проводящие наноингредиенты, включая наночастицы и нанопроволоки. Помимо отличной проводимости, металлические наночастицы могут быть спечены в тонкие пленки или проволоки.
(3) Неорганические полупроводниковые материалы
Неорганические полупроводниковые материалы, представленные ZnO и ZnS, имеют широкие перспективы применения в области носимых гибких электронных датчиков благодаря своим выдающимся пьезоэлектрическим свойствам.
(4) Органические материалы
Масштабные массивы датчиков давления имеют решающее значение для будущего развития носимых датчиков. Датчики давления, основанные на пьезорезистивных и емкостных механизмах передачи сигнала, страдают от перекрестных помех, что приводит к неточным измерениям.
Этот вопрос представляет собой одну из самых серьезных проблем в развитии носимых датчиков. Использование транзисторов предлагает решение для уменьшения перекрестных помех.
В связи с этим многие исследования в области носимых датчиков и искусственного интеллекта посвящены способам получения крупномасштабных гибких транзисторов, чувствительных к давлению.
5) Применение гибких датчиков
Гибкая электроника охватывает многие области, в том числе и гибкий складной телефон, выпущенный компанией Huawei, в котором используется технология гибкой электроники.
Как правило, гибкая электроника изготавливается из смеси органических и неорганических материалов, демонстрируя отличную гибкость. Гибкие датчики, изготовленные из гибких материалов, демонстрируют впечатляющую приспособляемость к окружающей среде.
По мере развития Интернета вещей и искусственного интеллекта многие гибкие датчики отличаются высокой степенью интеграции и интеллектуальными функциями.
Преимущества гибких датчиков открывают многообещающие перспективы их применения, в том числе в медицинской электронике, экологическом мониторинге и носимых устройствах.
Например, в области мониторинга окружающей среды ученые могут поместить гибкие датчики в устройства для отслеживания интенсивности тайфунов и штормов.
Что касается носимых устройств, то гибкие электронные продукты лучше справляются с тестированием параметров, связанных с кожей, учитывая неплоскую природу человеческого тела.
Гибкие датчики давления широко используются в умной одежде, интеллектуальных видах спорта и роботизированной "коже". Поливинилиденфторид, силиконовый каучук и полиимид, которые служат базовыми материалами, широко применяются в производстве гибких датчиков давления.
Эти материалы отличаются от датчиков силы, использующих металлические тензорезисторы, и общих датчиков давления, в которых используются полупроводниковые чипы n-типа, превосходной гибкостью, проводимостью и пьезорезистивными свойствами.
Цзяньпин Ю и его команда предложили новый трехмерный гибкий емкостной тактильный сенсорный массив, способный одновременно измерять давление и силу сдвига.
С индуктивным электродным слоем на основе гибких печатных плат (FPCB) и плавающим электродным слоем на основе полидиметилсилоксана (PDMS), хрупкая интерфейсная схема обрабатывается на индуктивном электродном слое снизу, значительно повышая изгибную жесткость сенсорного массива.
Проводящий трикотаж, созданный путем нанесения проводящих композитных материалов на основе углерода на трикотажную ткань, разработанный Вэйцзином Йи и его командой, демонстрирует ярко выраженные пьезорезистивные характеристики.
Зависимость между давлением и сопротивлением этого проводящего трикотажа в диапазоне давлений имеет хорошую линейную зависимость и отличную повторяемость.
Эта ткань может быть использована для измерения давления в "умной" одежде, гибких манекенах и т.д., что имеет большое значение для исследований в области носимых устройств. Память с плавающим затвором, изготовленная с использованием PEN в качестве гибкой подложки и органических материалов в качестве проводящего слоя, обладает превосходными характеристиками, а полученная гибкая матрица датчиков давления также имеет высокое разрешение.
Компания SOHM и другие специалисты создали гибкие датчики давления, встроив электродные слои PDMS в вертикально выровненные массивы углеродных нанотрубок, которые могут имитировать функции тактильной чувствительности и использоваться для исследования "кожи" роботов.
3. Восприятие и идентификация заготовок
Идентификация заготовок - неотъемлемый этап промышленного производства. Основная задача - определить, действительно ли заготовки, подаваемые на станки для обработки, являются теми, для которых они предназначены, а также определить их текущую позиционную информацию.
На небольших предприятиях или в отраслях с низкими требованиями к автоматизации обнаружение и идентификация заготовок могут выполняться вручную.
Однако в крупномасштабном промышленном производстве или гибких автоматизированных производственных системах множество различных заготовок автоматически направляются в различные устройства обработки внутри системы, что требует автоматического обнаружения и идентификации.
Сочетание компьютерного зрения и искусственного интеллекта для автоматической идентификации и обнаружения заготовок является важной областью современных исследований.
По статистике, более 80% информации, обрабатываемой человеком, поступает от зрительного восприятия, что делает визуальные датчики преимуществом в получении информации о рабочем пространстве и заготовках:
(1) Даже после отбрасывания значительной части визуальных данных, оставшаяся информация об окружающей обстановке часто оказывается более обширной и точной, чем та, которую предоставляют LIDAR или ультразвуковые датчики.
(2) LIDAR и ультразвуковые датчики работают, активно излучая импульсы и принимая отраженные импульсы для измерения расстояния. Таким образом, когда на верстаке одновременно находится несколько заготовок, между ними могут возникать помехи. Однако эта проблема не существует при визуальных измерениях, которые являются пассивными.
(3) Период выборки данных от LIDAR и ультразвуковых датчиков обычно больше, чем у камер, что делает их менее эффективными для предоставления информации высокоскоростным роботам. Напротив, визуальные датчики обеспечивают значительно более высокую скорость выборки.
Конечно, у визуальных датчиков есть свои недостатки, например, они менее эффективны, чем активные датчики, такие как радары миллиметровых волн, в условиях тумана, под прямыми солнечными лучами и ночью.
Активные датчики могут напрямую измерять такие параметры, как расстояние и скорость цели, в то время как визуальные датчики требуют вычислений для их получения.
Однако в структурированных средах, таких как лаборатории и автоматизированные производственные цеха, двойные преимущества визуальных датчиков в плане информативности и скорости сбора информации, несомненно, будут играть решающую роль в развитии автоматического обнаружения и распознавания заготовок.
С постоянным улучшением производительности компьютеров и быстрым развитием и совершенствованием технологии компьютерного зрения использование компьютеров для распознавания целей на изображениях стало актуальным направлением исследований.
Кроме того, широкое распространение высокоскоростных аппаратных методов реализации позволило более эффективно применять технологию распознавания изображений в реальном времени на практике.
Поэтому использование компьютерного зрения в сочетании с искусственным интеллектом для автоматического обнаружения и распознавания заготовок имеет большое практическое значение.
На начальном этапе контроля и идентификации заготовок в основном использовались ручные методы. Однако с постоянным увеличением скорости работы в режиме онлайн и ростом требований к контролю и идентификации заготовок ручные методы становятся все более неадекватными промышленным требованиям.
Это привело к появлению множества инновационных технологий для удовлетворения потребностей в контроле и идентификации деталей, таких как вихретоковое обнаружение, инфракрасный контроль, ультразвуковой контроль, радиографический контроль, голографический контроль и технологии контроля с помощью машинного зрения.
Эти технологии привнесли новую жизнь в контроль и идентификацию деталей, значительно повысив уровень автоматизации.
Среди этих новых технологий наиболее широкое применение получила система машинного зрения благодаря своей способности получать обширную и точную информацию.
Например, с помощью технического зрения при сборке роботов можно определить размеры и форму компонентов, чтобы обеспечить правильность и контроль качества сборки.
Кроме того, на основе информации, распознаваемой зрением, можно загружать и разгружать товары с помощью автоматизированных логистических систем.
Это позволяет идентифицировать детали в быстром движении, определять положение и ориентацию объекта относительно координат, завершать позиционирование и категоризацию объектов, распознавать расстояние до объекта и угол наклона, выделять заданные параметры и обнаруживать ошибки.
В настоящее время для идентификации заготовок используются преимущественно методы калибровки, основанные на использовании традиционных камер.
С точки зрения вычислительного мышления традиционные методы калибровки камер можно разделить на четыре типа: методы калибровки с использованием алгоритмов оптимизации, методы с использованием матрицы преобразования камеры, двухэтапный метод с учетом компенсации искажений и метод калибровки в двух плоскостях с использованием более рациональной модели изображения камеры.
По характеристикам алгоритмов решения эти методы также можно разделить на методы прямой нелинейной минимизации (итерационные методы), методы решения в замкнутой форме и двухшаговые методы.
(1) Метод калибровки с использованием алгоритма оптимизации
Эти методы калибровки камер предполагают наличие сложной оптической модели изображения. Они учитывают различные факторы в процессе формирования изображения и получают параметры модели камеры путем решения линейных уравнений.
Однако этот метод полностью игнорирует нелинейные искажения в процессе работы камеры. Для повышения точности калибровки неизбежно применение алгоритмов нелинейной оптимизации.
Этот метод имеет два основных недостатка: во-первых, результат калибровки камеры зависит от начального значения, заданного камере.
Если начальное значение не соответствует действительности, трудно получить правильный результат калибровки с помощью программы оптимизации. Во-вторых, процесс оптимизации занимает много времени и не позволяет получить результаты калибровки в режиме реального времени.
Дайнис и Джубертс предложили метод, использующий прямое линейное преобразование и вводящий нелинейные коэффициенты искажения для калибровки камеры. Их система предназначена для точного измерения траектории движения робота.
Система может измерять траекторию движения робота в режиме реального времени, но при этом не требуется, чтобы алгоритм калибровки обеспечивал калибровку системы в режиме реального времени.
(2) Использование метода калибровки матрицы преобразования камеры
Традиционные методы фотограмметрии предполагают, что уравнение, описывающее связь между трехмерной пространственной системой координат и двумерной системой координат изображения, в общем случае является нелинейным уравнением внутренних и внешних параметров камеры.
Если пренебречь нелинейными искажениями объектива камеры и рассматривать элементы матрицы преобразования перспективы как неизвестные, то набор трехмерных контрольных точек и соответствующих точек изображения может быть использован для решения каждого элемента матрицы преобразования перспективы линейным методом.
Преимущество этого метода калибровки заключается в том, что он не требует использования методов оптимизации для решения параметров камеры, что позволяет ускорить вычисления и рассчитывать параметры камеры в режиме реального времени.
Тем не менее, все еще существуют некоторые недостатки: Во-первых, в процессе калибровки не учитываются нелинейные искажения объектива камеры, что влияет на точность калибровки.
Во-вторых, количество неизвестных параметров в линейном уравнении превышает количество независимых параметров модели камеры, подлежащих решению, что означает, что неизвестные в линейном уравнении не являются взаимно независимыми.
Эта проблема избыточной параметризации означает, что в ситуациях, когда изображение содержит шум, решение неизвестных в линейном уравнении может хорошо соответствовать набору линейных уравнений, но параметры, полученные из этого, не обязательно будут соответствовать реальной ситуации.
Метод калибровки камеры с использованием матрицы преобразования перспективы широко применяется в реальных системах и дает удовлетворительные результаты.
(3) Двухэтапный метод
Идея этого метода калибровки заключается в том, чтобы сначала использовать метод прямого линейного преобразования или метод матрицы перспективного преобразования для решения проблемы параметров камеры.
Затем, используя полученные параметры в качестве начальных значений, учитываются факторы искажения и используются алгоритмы оптимизации для дальнейшего повышения точности калибровки.
Не забывайте, что делиться - значит заботиться! : )
Поделиться
Facebook
Twitter
LinkedIn
Reddit
VK
Электронная почта
Печать
Автор
Шейн
Основатель MachineMFG
Как основатель MachineMFG, я посвятил более десяти лет своей карьеры металлообрабатывающей промышленности. Мой обширный опыт позволил мне стать экспертом в области производства листового металла, механической обработки, машиностроения и станков для обработки металлов. Я постоянно думаю, читаю и пишу об этих предметах, постоянно стремясь оставаться на переднем крае своей области. Позвольте моим знаниям и опыту стать преимуществом для вашего бизнеса.
Вы начинающий инженер-механик, желающий добиться успеха в своей области? В этой статье мы рассмотрим 10 лучших программ для проектирования машиностроения, которые помогут вам повысить...
Вы когда-нибудь задумывались, как обеспечивается целостность приваренных гаек и винтов в вашем автомобиле? В этой статье рассказывается о тщательном процессе проверок и инспекций качества, благодаря которым ваш автомобиль...
Вы когда-нибудь задумывались, что помогает электродвигателю работать без перегрева? Понимание безопасных рабочих температур для электродвигателей имеет решающее значение для их долговечности и производительности. В этой статье...
Задумывались ли вы когда-нибудь об увлекательном мире литья? Этот древний, но постоянно развивающийся производственный процесс формирует нашу повседневную жизнь бесчисленными способами. В этой статье мы рассмотрим...
Вы когда-нибудь задумывались о том, как плавно работают шестеренки в вашем автомобиле или самолете? В этой статье мы расскажем о ведущих производителях шестеренок, которые формируют будущее машиностроения. Вы узнаете...
Вы когда-нибудь задумывались о том, как процветает мир автоматизации? В этой статье рассматриваются ведущие компании, занимающиеся производством пневматики и внедряющие инновации. От Японии до Германии - узнайте, как эти лидеры отрасли формируют наше будущее. Вы узнаете...
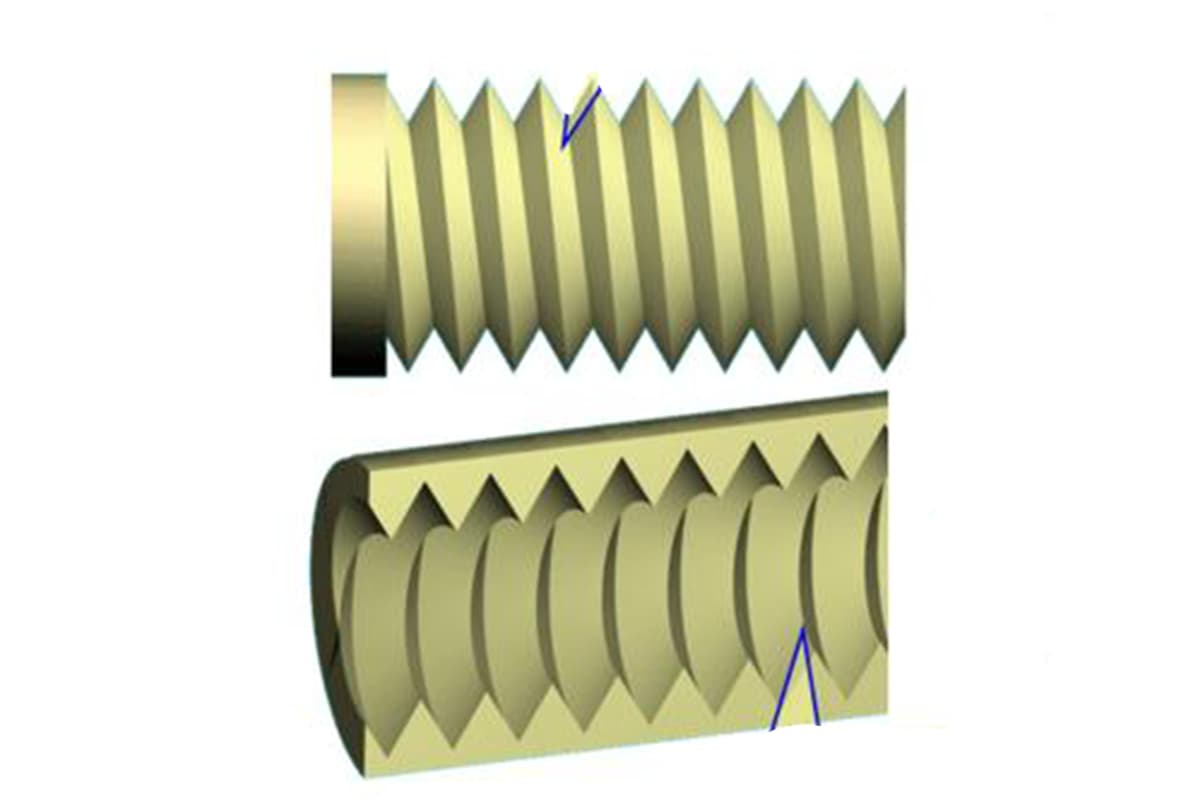
Вы когда-нибудь задумывались о том, как крошечные нити могут выдерживать огромные нагрузки? В этой статье раскрываются секреты площади поперечного сечения метрической резьбы и ее роли в машиностроении. Узнайте, как эти измерения...
Вы когда-нибудь задумывались, почему двигатель вашего автомобиля работает без сбоев или как бесперебойно работает тяжелая техника? Секрет кроется в используемых маслах - смазочных и гидравлических. В этой статье мы рассмотрим...
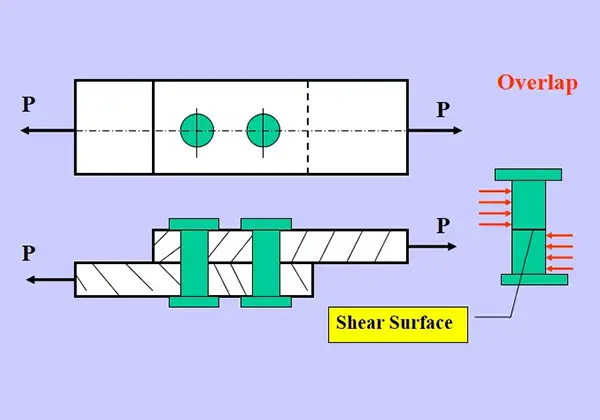
Вы когда-нибудь задумывались, как на самом деле работают крошечные заклепки, скрепляющие массивные конструкции? В этой статье мы раскроем увлекательный мир заклепочных соединений, изучим их типы, расчеты прочности,...