Case One
Given:
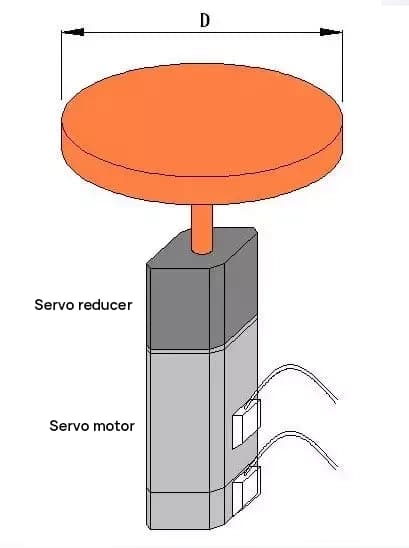
- Disc mass M=50 kg
- Disc diameter D=500 mm
- Maximum disc speed 60 rpm
Please select the servo motor and reduction gear, component schematic as follows:
Calculating the moment of inertia for the disc rotation
JL = MD2/8 = 50 * 502 / 8 = 15625 [kg·cm2]
Assuming a gear reduction ratio of 1:R, the load inertia reflected on the servo motor shaft is 15625/R2.
According to the principle that the load inertia should be less than three times the rotor inertia JM of the motor,
if a 400W motor is selected, JM = 0.277 [kg·cm2],
then: 15625 / R2 < 3*0.277, R2 > 18803, R > 137,
the output speed = 3000/137 = 22 [rpm],
which does not meet the requirement.
If a 500W motor is selected, JM = 8.17 [kg·cm2],
then: 15625 / R2 < 3*8.17, R2 > 637, R > 25,
the output speed = 2000/25 = 80 [rpm],
which satisfies the requirement.
This type of transmission has minimal resistance, so torque calculations are ignored.
Case Two
Given:
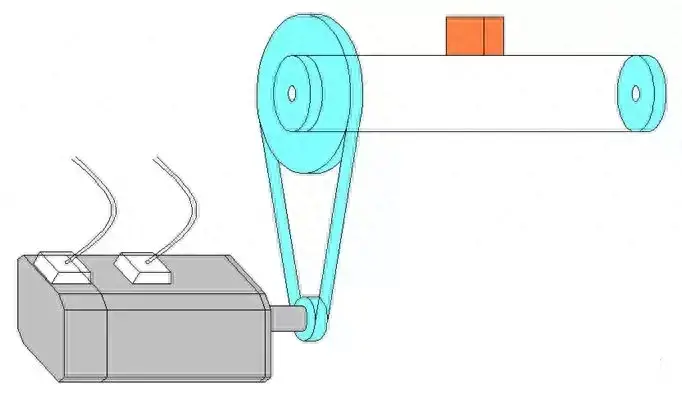
- Load weight M = 50 kg
- Synchronous belt wheel diameter D = 120 mm
- Reduction ratio R1 = 10, R2 = 2
- Friction coefficient between load and machine table µ = 0.6
- Maximum motion speed of load: 30 m/min
- Time for load to accelerate from rest to maximum speed: 200ms
Ignoring the weight of each conveyor belt wheel,
What is the minimum power requirement for a motor to drive such a load?
The schematic diagram of the component is as follows:
1. Calculating the load inertia reflected on the motor shaft:
JL = M * D2 / 4 / R12
= 50 * 144 / 4 / 100
= 18 [kg·cm2]
According to the principle that load inertia should be less than three times the motor rotor inertia (JM):
JM > 6 [kg·cm2]
2. Calculating the torque required to drive the motor load:
Torque required to overcome friction:
Tf = M * g * µ * (D / 2) / R2 / R1
= 50 * 9.8 * 0.6 * 0.06 / 2 / 10
= 0.882 [N·m]
Torque required for acceleration:
Ta = M * a * (D / 2) / R2 / R1
= 50 * (30 / 60 / 0.2) * 0.06 / 2 / 10
= 0.375 [N·m]
The servo motor’s rated torque should be greater than Tf, and the maximum torque should be greater than Tf + Ta.
3. Calculating the required motor speed:
N = v / (πD) * R1
= 30 / (3.14 * 0.12) * 10
= 796 [rpm]
Case Three
Given:
- Load weight M = 200 kg
- Screw pitch PB = 20 mm
- Screw diameter DB = 50 mm
- Screw weight MB = 40 kg
- Coefficient of friction µ = 0.2
- Mechanical efficiency η = 0.9
- Load movement speed V = 30 m/min
- Total movement time t = 1.4 s
- Acceleration and deceleration time t1 = t3 = 0.2 s
- Resting time t4 = 0.3 s
Please select the servo motor with the minimum power that meets the load requirements,
The component diagram is as follows:
1. Calculation of Load Inertia Converted to the Motor Shaft
Load inertia of the weight converted to the motor shaft
JW = M * (PB / 2π)²
= 200 * (2 / 6.28)²
= 20.29 [kg·cm²]
The rotational inertia of the screw
JB = MB * DB² / 8
= 40 * 25 / 8
= 125 [kg·cm²]
Total load inertia
JL = JW + JB = 145.29 [kg·cm²]
2. Calculation of Motor Speed
Required motor speed
N = V / PB
= 30 / 0.02
= 1500 [rpm]
3. Calculation of Torque Required to Drive the Motor Load
The torque required to overcome friction
Tf = M * g * µ * PB / 2π / η
= 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9
= 1.387 [N·m]
Torque required when the weight is accelerating
TA1 = M * a * PB / 2π / η
= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9
= 1.769 [N·m]
Torque required when the screw is accelerating
TA2 = JB * α / η
= JB * (N * 2π / 60 / t1) / η
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9
= 10.903 [N·m]
Total torque required for acceleration
TA = TA1 + TA2 = 12.672 [N·m]
4. Selection of Servo Motor
Rated torque of the servo motor
T > Tf and T > Trms
Maximum torque of the servo motor
Tmax > Tf + TA
Finally, the ECMA-E31820ES motor was selected.