Optimum Kam Tahrik Mekanizması Tasarımına Ulaşmak: Dikkat Edilmesi Gereken Önemli Noktalar
Basit bir kam ve takipçi sistemi karmaşık makinelerde nasıl verimli ve hassas hareket sağlayabilir? Bu makale, kam tahrik mekanizması tasarımının inceliklerini araştırmakta, farklı kam ve takipçi türlerini, hareket yollarını ve optimum performansın nasıl elde edileceğini açıklamaktadır. Okuyucular, temel bileşenlerden gelişmiş tasarım yöntemlerine kadar, yüksek verimli kam sistemleri oluşturmaya yönelik değerli bilgiler edineceklerdir. Mühendislik projelerinde kam mekanizmalarını anlamanızı ve uygulamanızı geliştirecek pratik ipuçları ve ayrıntılı analizler öğrenmeyi bekleyin.
Kam Mekanizmalarının Bileşimi ve Sınıflandırılması
Kam mekanizması genellikle her ikisi de çerçeveye sabitlenmiş olan kam ve takipçi olmak üzere iki hareketli parçadan oluşur. Kam cihazı son derece çok yönlüdür ve neredeyse her türlü keyfi hareketi üretebilir.
Kam, kavisli bir yüzeye veya oluğa sahip bir bileşen olarak tanımlanabilir. Sallanarak veya döndürülerek, başka bir bileşen olan takipçi önceden ayarlanmış hareket sağlayabilir. Takipçinin yolu, ileri geri hareket elde etmek için çoğunlukla bir yuva ile sınırlıdır.
Bazen dönüş stroku sırasında kendi ağırlığına güvenirken, bazı mekanizmalar hassas hareketler elde etmek için geri dönüş kuvveti olarak yayları kullanır. Diğerleri belirli yollar boyunca hareket etmek için kılavuz raylar kullanır.
Kamın şekline göre üç türe ayrılabilir: diskli kam, hareketli kam ve silindirik kam.
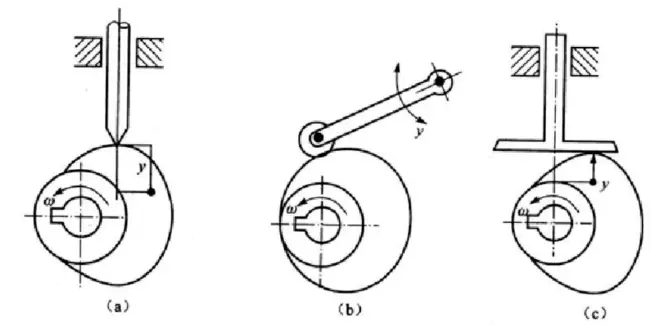
Takipçiler uçlarına göre üç tipe ayrılabilir: sivri uçlu takipçiler, makaralı takipçiler ve düz tabanlı takipçiler.
Kam Mekanizması Türleri (a) Sivri uçlu takipçi; (b) Makaralı takipçi: (c) Düz tabanlı takipçi
Keskin burunlu takipçi ile kam arasında yüksek gerilime ve hızlı aşınmaya yol açan noktasal temas nedeniyle, büyük darbeli düşük hızlı kam mekanizmaları için uygun değildir. Makaralı takipçi bu eksikliklerin üstesinden gelebilir.
İletim verimliliğini artırmak için, alt yüzeydeki kuvvet yönüne dik olan düz tabanlı bir takipçi de ekleyebiliriz.
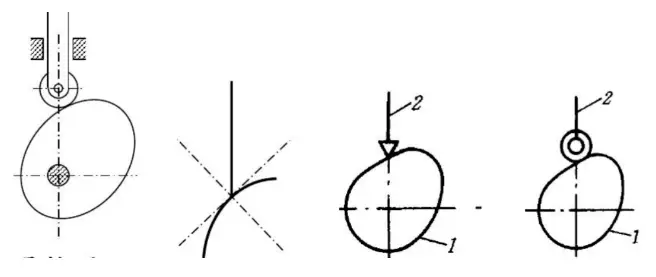
Daha önce ele aldığımız aktarım bileşenleri düz çizgi hareketi şeklindedir, ancak salınım hareketi şeklinde de olabilirler. Birincisine doğrudan etkili takipçi, ikincisine ise salınımlı takipçi denir.
Ayrıca kam dönüş merkezini takipçinin hareketinin doğrusal yolu üzerinde yapmayabiliriz. Şu anda buna ofset diyoruz. Buna karşılık, dönüş merkezi takipçinin hareketinin doğrusal yolu üzerindeyse, buna eş merkezli diyebiliriz.
Buna ek olarak, yüksek gerilimli kilitleme ilişkilerini sürdürmek ve mekanizmayı geometrik kilitleme ve kuvvet kilitleme olarak ikiye ayırmak için yöntemler de düşünebiliriz.
Kam şeklini, takipçinin ucunu ve takipçinin hareket modellerini birleştirerek, tasarlanan mekanizmanın adını belirleyebiliriz, örneğin: keskin burunlu doğrudan etkili takipçili disk kam (takipçi-kam bağıl konumu + takipçi ucu + takipçi hareket modeli + kam şekli).
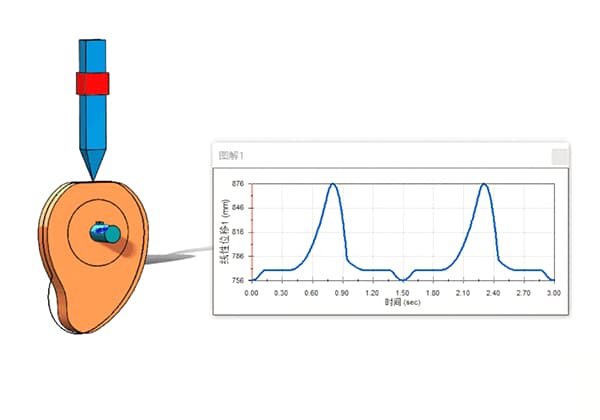
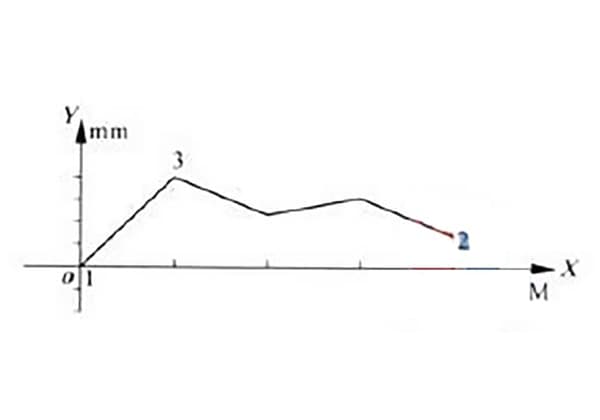
Kam Mekanizmalarının Hareket Süreci
Kam mekanizması
İlk olarak, üzerine bir takipçi yerleştirilmiş bir kamımız var. Kam ω açısal hızında φs derece döndüğünde, takipçi hareket etmez. Bu sırada φs'ye bekleme açısı ve buna karşılık gelen daireye de temel daire diyoruz. Benzer şekilde, bu dairenin yarıçapına da temel daire yarıçapı r0 denir.
Daha sonra, kamı ω açısal hızında φ derece döndürmeye devam ettiğimizde, takipçi h kadar yükselir. Bu sırada, φ'ye strok açısı ve h'ye strok diyoruz.
Daha sonra, takipçi h noktasına ulaştığında, bir süre kalmasına izin veririz. Bu sırada kam, kaldırma açısına karşılık gelen φs' kadar döner.
Son olarak, takipçiyi orijinal konumuna geri getirmemiz gerekir, bu nedenle kamı φ' kadar döndürürüz. Bu sırada takipçi başlangıç noktasına geri döner. Buna φ' dönüş açısı diyoruz.
Bir Kam Mekanizması Nasıl Tasarlanır?
Kam mekanizmalarını tasarlamak için iki ana yöntem vardır; biri grafiksel yöntem, diğeri ise analitik yöntemdir.
İlki nispeten basittir, yalnızca istenen itme hareketi diyagramının sağlanmasını ve ardından diyagram tarafından sağlanan açı-süreç ilişkisine dayalı olarak karşılık gelen kontur eğrisinin elde edilmesini gerektirir.
Doğruluk çok yüksek değildir. İkincisi hesaplanır ve hesaplanması nispeten karmaşıktır, bu da yüksek hassasiyet gereksinimleri olan kam mekanizmalarının tasarlanması için uygundur.
MachineMFG'nin kurucusu olarak, kariyerimin on yıldan fazlasını metal işleme sektörüne adadım. Kapsamlı deneyimim, sac metal imalatı, talaşlı imalat, makine mühendisliği ve metaller için takım tezgahları alanlarında uzman olmamı sağladı. Bu konular hakkında sürekli düşünüyor, okuyor ve yazıyorum, sürekli olarak alanımın ön saflarında kalmaya çalışıyorum. Bilgi ve uzmanlığımın işiniz için bir değer olmasına izin verin.
Bir servo sürücüyü en yüksek performans için nasıl ayarlayacağınızı hiç merak ettiniz mi? Bu kılavuz, konum kontrolünden hız düzenlemesine kadar kazanç parametrelerini ayarlama hakkında bilmeniz gereken her şeyi kapsar....
Isıl işlem sırasında kalıplarınızın çatlamasını nasıl önleyebilirsiniz? Bu makale, kalıp ısıl işleminin karmaşık sürecini inceleyerek su verme çatlakları ve yetersiz ısıl işlem gibi yaygın kusurları ana hatlarıyla...
Flanş cıvatalarını sıkarken gereken hassasiyeti hiç düşündünüz mü? Doğru teknik, sızıntıları önleyebilir ve yüksek basınçlı sistemlerde güvenliği sağlayabilir. Bu makale, flanş cıvatalarını sıkmak için...
Hassas makine operasyonları sağlamak için bir kılavuz rayın düzlüğünü nasıl ölçersiniz? Bu makalede iki yaygın yöntem incelenmektedir: iki uçlu nokta bağlantı yöntemi ve minimum koşul...
Polisaj makineleri metal yüzeylerde o mükemmel finisajı nasıl elde ediyor? Bu makalede, bu temel araçların arkasındaki karmaşık mekaniği keşfediyoruz. İlgili bileşenlerden çift aşamalı...
Bu makale, döküm üretiminin büyüleyici dünyasına dalarak hammaddeleri temel bileşenlere dönüştüren süreci adım adım ortaya koyuyor. İlgili teknikler, malzemeler ve kalite kontrolleri hakkında bilgi edinin,...
Her gün binlerce karmaşık plastik parçayı tam isabet ve hızla ürettiğinizi hayal edin. Dönüştürücü bir üretim tekniği olan enjeksiyon kalıplama, erimiş malzemeyi kalıplara enjekte ederek bunu mümkün kılıyor...
Basit bir cam yüzey ile takım tezgahlarının hassasiyetini ortaya çıkardığınızı hayal edin. Doğrusal ızgaralı teraziler, ince çizgileri son derece hassas ölçümlere dönüştürerek tam da bunu yapar. Bu makale, bunların nasıl...
Arabanızdaki veya uçağınızdaki dişlilerin nasıl bu kadar sorunsuz çalıştığını hiç merak ettiniz mi? Bu makale, makine mühendisliğinin geleceğini şekillendiren en iyi dişli üreticilerini açıklıyor. Öğreneceksiniz...