Lineer Rulmanlar İçin Kapsamlı Bir Kılavuz: Bilmeniz Gereken Her Şey
Makinelerde sorunsuz ve hassas hareketin anahtarının ne olduğunu hiç merak ettiniz mi? Lineer rulmanlar, sayısız otomatik sistemin arkasındaki gizli kahramanlardır ve zahmetsiz aktarım, taşıma, konumlandırma ve montaj sağlarlar. Bu blog yazısında, lineer rulmanların dünyasına dalarak onları diğer lineer hareket bileşenleriyle karşılaştıracak ve benzersiz avantajlarını ortaya çıkaracağız. Bu mühendislik harikalarının tasarımlarınızda nasıl devrim yaratabileceğini keşfetmeye hazır olun!
1. Lineer rulmanlar ve diğer lineer hareket kılavuz bileşenleri
Doğrusal hareket kılavuz bileşenleri, aktarma, taşıma, konumlandırma ve montaj için otomatik hareket mekanizmalarında en yaygın kullanılan bileşenlerdir.
Burada lineer rulmanları, kayar kılavuzları ve yağsız burçları karşılaştıracağız ve lineer rulmanların kullanımına odaklanacağız.
Aşağıda, yukarıdaki özellikler ile inşaat arasındaki ilişkiye bir giriş yer almaktadır.
(2) Doğrusal kılavuz parçaların özellikleri ve yapısı arasındaki korelasyon.
1. Yük taşıma kapasitesine göre performans farklılıkları:
Lineer rulmanlar ve kendinden yağlamalı burçlar.
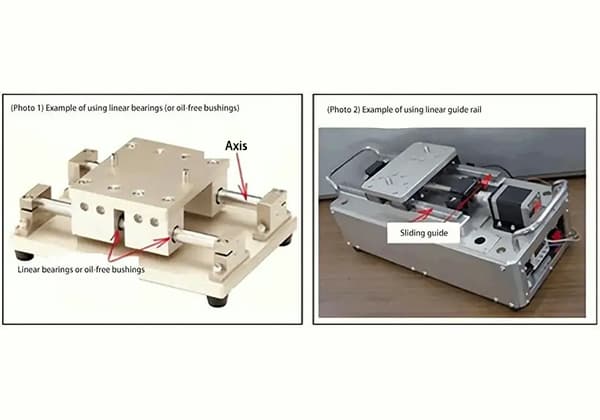
a) Lineer rulmanlı veya kendinden yağlamalı burçlu hareketli bileşenler, hareket işlevlerini yerine getirmek için genellikle her iki uçta destek yapıları tarafından desteklenen bir şaft (kılavuz ray) üzerine monte edilir. Büyük yükler taşırken şaft kolayca deforme olur (bkz. [fotoğraf 1]).
(Ek olarak, dikey olarak doğrusal kılavuzlama yapıldığında, şaftın hareketli bileşenin yükünü desteklemesi gerekmediğinden yük sorununu göz ardı eden basit bir yapı kullanılabilir).
Lineer kılavuzlar
b) Hareketli bileşenler, mükemmel yük taşıma özelliklerine sahip olan tabana monte edilmiş sabit kılavuz raylar üzerinde hareket eder (bkz. [fotoğraf 2]).
Lineer rulmanlar ve kendinden yağlamalı burçlar => Her iki ucundan sabitlenmiş bir mil (kılavuz ray) üzerinde doğrusal hareket => hafif ila orta yüklerde doğrusal hareket.
Doğrusal kılavuzlar => Tabana sabitlenmiş kılavuz raylar üzerinde doğrusal hareket => hafif ila ağır yüklerle doğrusal hareket.
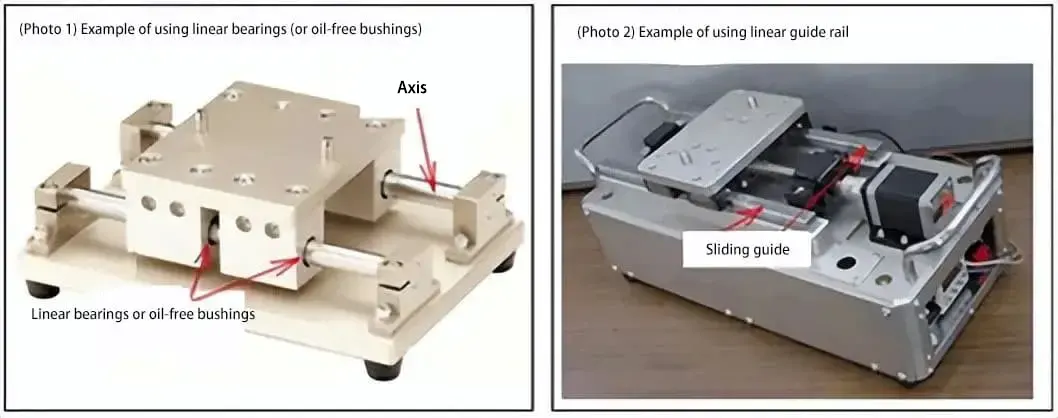
2. Sürtünme katsayısına göre performans farklılıkları:
Burada, kılavuz kayma yöntemindeki farklılıklar (yuvarlanma veya yüzey kayması) performans farklılıklarını belirler. Sürtünme katsayısındaki fark doğrudan tahrik aktüatörünün seçimiyle ilgilidir.
a) Küçük sürtünme direnci = küçük sürtünme kuvveti = küçük torklu bir motor tarafından tahrik edilebilir = dönme hareketi doğrusal harekete dönüştürülebilir.
b) Büyük sürtünme direnci = büyük sürtünme kuvveti = büyük tork veya itme tahriki gerektirir = doğrudan doğrusal bir silindir tarafından tahrik edilebilir.
Kullanım için önlemler
Sürtünme katsayısının boyutu, tahrik ekipmanının kabiliyetini ve çalışma sırasında üretilen ısı miktarını etkiler. Kendinden yağlamalı burçlar, yüksek ısı üretimi ile sürekli yüksek hızlı çalışma için uygun değildir.
Bir silindir kullanıldığında, başlangıç/durdurma hızı bir motorda olduğu gibi kontrol edilemez. Yüksek hızlı çalışma ve titreşim bastırma, amortisörler ve damperler gibi esnek frenleme mekanizmaları takılarak elde edilebilir.
3. Kılavuz hassasiyetine göre performans farklılıkları:
Temel olarak performans, rulman ile kılavuz ray arasındaki boşluğa göre belirlenir.
a) Lineer rulmanlar söz konusu olduğunda, kılavuz ray olarak silindirik bir mil kullanılır ve rulman ile kılavuz ray arasındaki boşluk "interference fit: g6" veya "transition fit: h5" olarak ayarlanır ve rulman minimum "boşluk" durumunda kayar.
b) Lineer kılavuzlar için özel kılavuz raylar kullanılır ve yüksek hassasiyetli rulmanlar ve küçük aralıklı tip (0-3 μm) veya basınçlı tip (-3-0 μm) kılavuz raylar eşleştirilir.
c) Lineer rulmanlarla karşılaştırıldığında, kendinden yağlamalı burçlar kılavuz ray (şaft) arasında daha büyük bir boşluğa sahiptir, bu da kılavuzlamada daha düşük hassasiyete neden olur.
Kullanım için önlemler
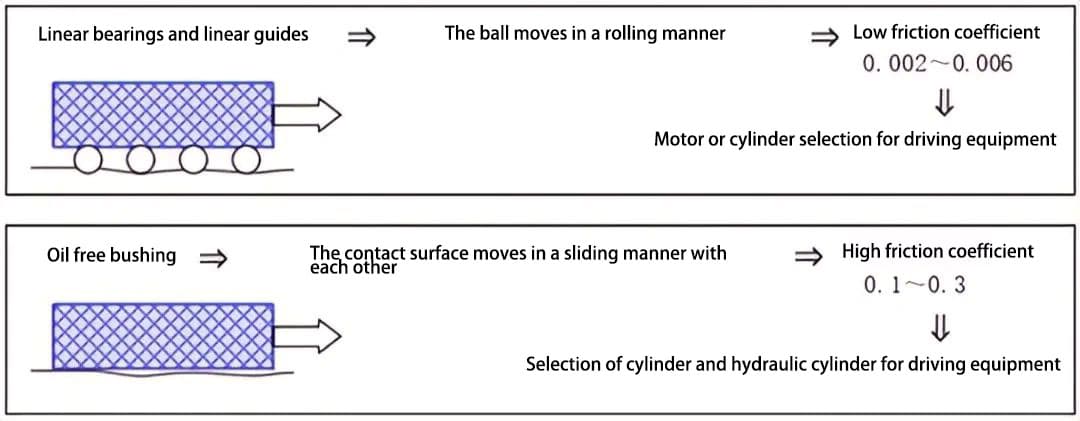
Bilye ve kılavuz ray arasındaki temas durumları lineer rulmanlar ve lineer kılavuzlar için farklıdır. Lineer rulmanlar, temas kısmının yerel olarak büyük bir yük taşıdığı noktasal temas durumuna sahiptir.
Lineer kılavuzlardaki kılavuz ray ve bilyalı rulman arasındaki temas kısmı, bilyenin kılavuz ray yüzeyi ile yüzey teması halinde olmasını sağlayan bir oluk şeklini benimser ve böylece temas yükü dağılır.
Kayma kısmındaki temas durumuna göre ikisi arasındaki yük taşıma kapasitesi özelliklerinde de farklılıklar vardır. ([Şekil 1] ve [Şekil 2])
Lineer rulmanlar => noktasal temas durumu => eşit olmayan dikey yük dağılımı => yüksek yük koşulları için uygun değildir.
Lineer kılavuzlar => yüzey temas durumu => dağınık dikey yük dağılımı => nispeten yüksek yüklere dayanabilir.
4. Çevresel direnç ve bakım yapılabilirlik hakkında:
Bu performans farkı, bileşen malzemelerdeki farklılıklar tarafından belirlenir.
a) Lineer rulmanlar ve lineer kılavuzlar, yağlama yağı (gres) etkisi nedeniyle uzun vadeli güvenilirlik elde edebilir, bu nedenle çalışma ortamı yağlama yağının çevresel direnç endeksini aşamaz.
b) Kendinden yağlamalı burçlar genellikle yağlamanın olmadığı ortamlarda kullanılır. yağlama yağive iyi çevresel dirence ve bakım kolaylığına sahiptir.
2. Lineer ve flanşlı tipler arasındaki ayrım
Aşağıda lineer rulmanların dış şekillerindeki farklılıklar (lineer tip ve flanşlı tip) ve montaj sırasında alınması gereken önlemler açıklanmaktadır.
(1) Lineer tip ve flanşlı tip lineer rulmanlar
[Fotoğraf 1] doğrusal tipi, [Fotoğraf 2] ise flanşlı tipi göstermektedir.
Flanşlı tip [Fotoğraf 2] lineer rulman aşağıdaki avantajlara sahiptir:
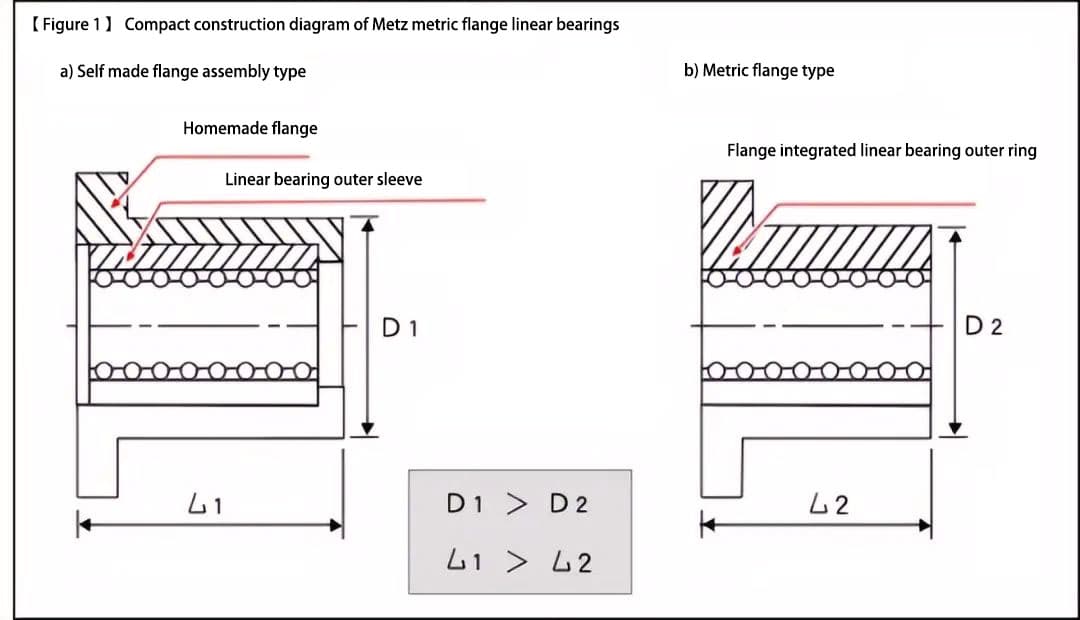
Lineer rulman ve flanşlı mil kovanının entegre bir yapısını benimseyerek daha kompakt bir yapıya sahiptir ([Şekil 1]).
Ayrı olarak üretilen bir flanşla birleştirilmiş bir lineer rulmanla karşılaştırıldığında, düşük maliyet, kısa teslimat süresi ve istikrarlı kalite gibi avantajlara sahiptir.
[Şekil 1] flanşlı lineer yatağın kompakt yapısını açıklayan şematik bir diyagramdır. Flanşlı lineer rulmanın montaj yapısı ve mil kovanının şekli çok uzundur, oysa flanşlı lineer rulman daha kompakt olan entegre bir yapıya sahiptir. Bu kompakt tasarım, yük taşıma performansının korunmasını sağlar.
(2) Lineer Tipler ve Flanş Tipleri Arasında Ayırım Yapma
Doğrusal veya flanş seçin rulman türleri aşağıdaki kriterlere göre seçiniz: Yük taşıyıcı olmaları durumunda flanş tipi lineer rulmanları seçin.
Lineer rulmanların kurulumunu çevreleyen alana ve yapı yüzeylerine göre seçim yapın. Lineer rulmanlarla ilgili montaj yöntemleri ve önlemler için (3) numaralı maddeye bakın.
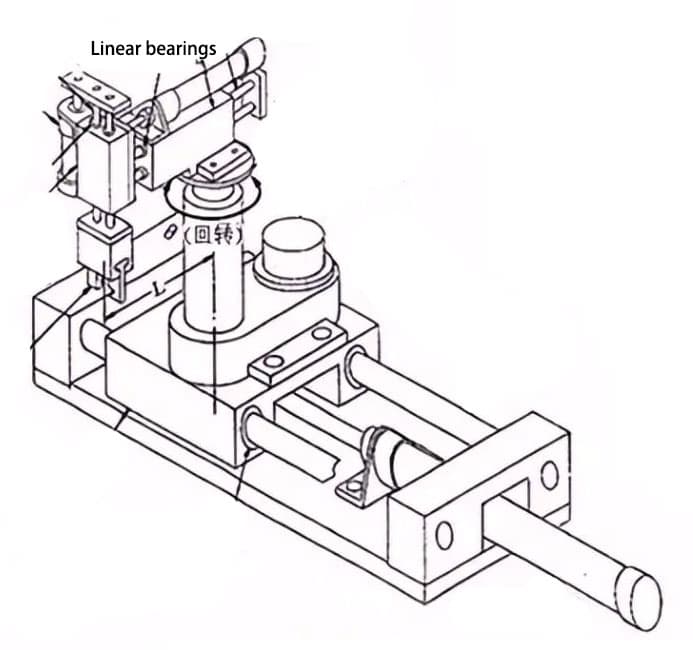
Lineer rulmanlar, şaft dönüşü için kendinden hareketli ve aks sabitli tiplere ayrılır. Şekil 2, kılavuz eksen olarak şaft ile X-Y-Z-θ tahrikli bir platformun yapısını göstermektedir. Rulmanlar buna göre sınıflandırılmıştır.
a) X ekseni: Lineer rulmanlar kendinden hareketli ve flanş tipindedir.
b) Y ekseni: Lineer rulmanlar sabittir (Θ ekseni yönünde) ve A ekseni yönünde harekete izin verir.
c) Z ekseni: Lineer rulmanlar Z ekseni yönünde sabitlenir ve Y ekseni yönünde harekete izin verir.
Doğrusal tipler için, istenen sabitleme gücüne bağlı olarak segman veya durdurucu plaka sabitleme yöntemlerini seçin.
a) Bölümün X ekseni hareketli parçası, doğrusal yatak tarafından desteklenen hareketli parçanın ağırlığının atalet kuvvetine maruz kalır. Doğrusal yatağın sıkıca sabitlenmesi gerekir.
b) Lineer yatak, yatak yuvasına sabitlenmiştir ve şaft yapısını tahrik etmek için bir silindir kullanılması nedeniyle, lineer yatağın eksenel sabitlemesi yalnızca sürtünmenin tepki kuvvetine dayanır, bu nedenle lineer tip için kompakt bir tasarım benimsenmiştir. Buna ek olarak, Y ekseni lineer yatakları, θ tahrikli platformun dönme eksenine göre iki eksene zıt yönde ayarlanmıştır ve dönme torkuna göre yüksek sertlik sağlar.
c) Hareketli şaft yönünden bakıldığında, b) ile aynıdır ve büyük kuvvetler taşımayacaktır.
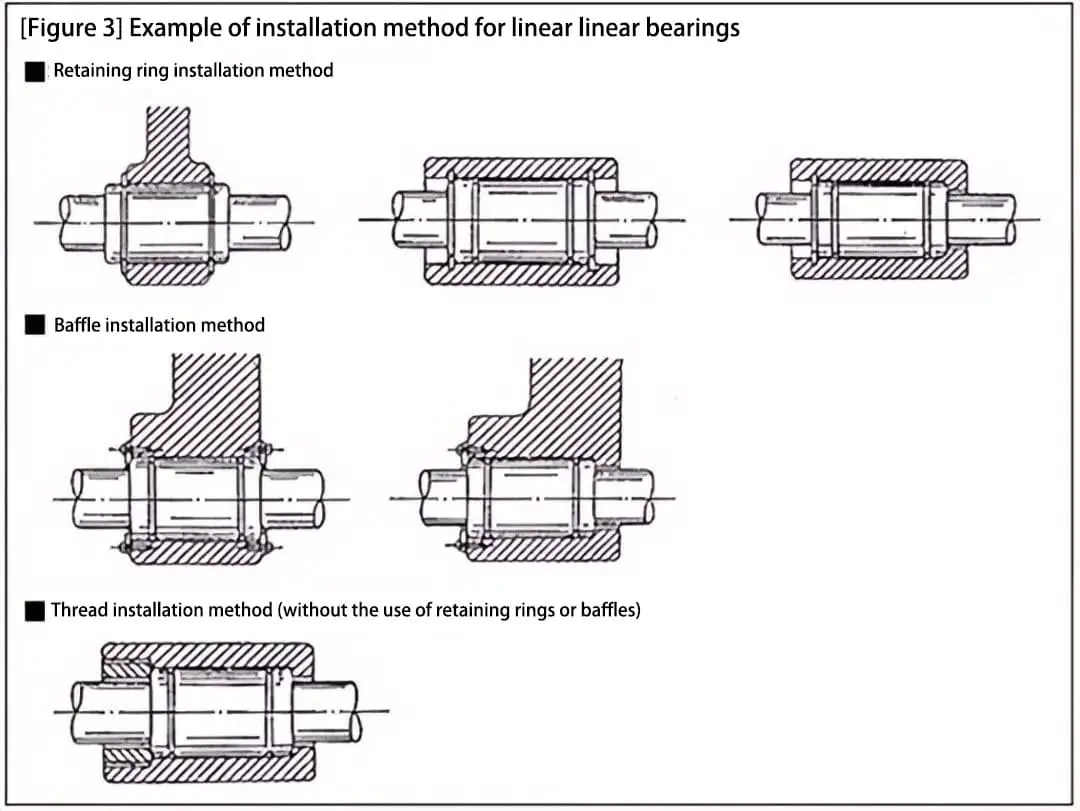
(3) Lineer rulmanlar için montaj yöntemleri ve önlemleri.
(1) Lineer rulmanlar için montaj yöntemleri
Lineer rulmanlar genellikle segmanlar veya durdurucu plakalar kullanılarak monte edilir ([Fotoğraf 3] ve [Şekil 3]'e bakın).
(2) Lineer rulmanların montaj açısı için önlemler
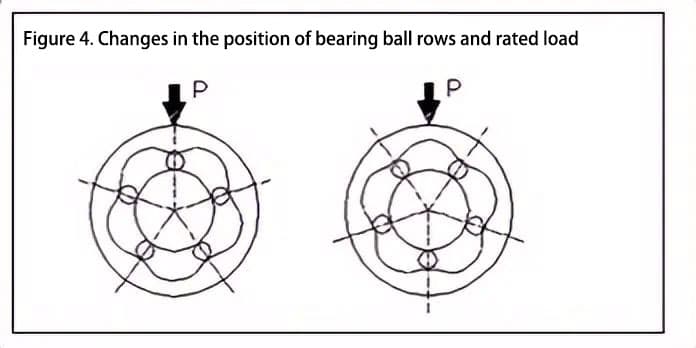
Mil çapı ve tipinin yanı sıra rulmandaki bilya sırası sayısındaki farklılıklar nedeniyle, lineer rulmanlar genellikle eşit açılarla düzenlenmiş 4 ila 6 bilya sırasına sahiptir. Lineer rulmanları yatay olarak kullanırken, bilya sıraları doğrudan yukarıdaki konumda olacak şekilde monte etmekten kaçının ([Şekil 4]'ün sol tarafında gösterildiği gibi), çünkü bu yoğunlaştırılmış yüklere neden olabilir.
[Şekil 4] 5 sıralı bir bilyalı rulmanı göstermektedir ve nominal yük değerlerinin oranı aşağıda gösterilmiştir (sağ taraf ÷ sol taraf). Bu nedenle, montaj yukarıdaki şemada gösterilen montaj açısına mümkün olduğunca yakın yapılmalıdır.
Statik yük değeri (Sağ taraf ÷ Sol taraf) = 1,46
Değerlendirme dinamik yükü (Sağ taraf ÷ Sol taraf) = 1,19
3. Tek astarlı, çift astarlı, uzatılmış ve yüzey işlemli rulmanların ayırt edilmesi.
(1) Yatak uzunluğu ve kılavuz performansı
Lineer rulmanlar, rulman uzunluğuna göre dört tipe ayrılabilir:
[1] tek çizgili
[2] çift astarlı
[3] genişletilmiş
[4] müşteri tasarımı (iki tek hatlı tip kullanılarak).
Rulman uzunluğundaki fark, kılavuzlama performansını aşağıdaki gibi doğrudan etkiler:
a) Yük taşıma kapasitesi
b) Rehberlik doğruluğu
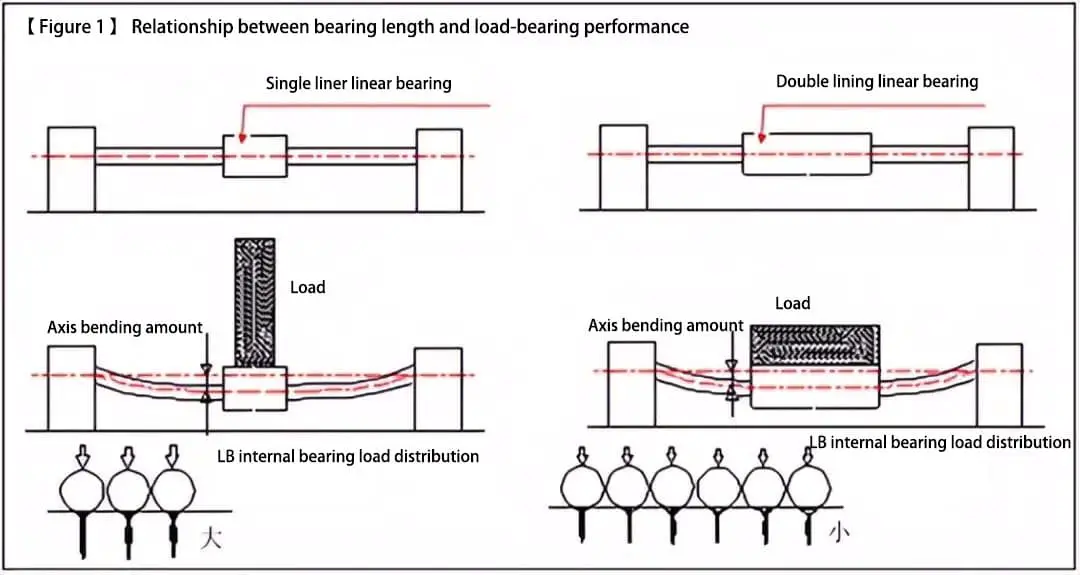
a) Yatak uzunluğu ile yük taşıma kapasitesi arasındaki ilişki
Rulman ne kadar uzunsa, o kadar çok destek noktası vardır ve her rulman temas noktası için gereken yük o kadar azdır. Bu sonuç, üç tip [1], [2] ve [3] lineer rulmanın nominal yükünün uzunluklarıyla sıralı olarak arttığı gerçek durumdan çıkarılabilir.
Bu nedenle, daha uzun bir lineer rulman uzunluğu seçmek ürünün yük taşıma kapasitesini artırabilir (= kullanım ömrü ve güvenilirlik artışı) ([Şekil 1]).
b) Yatak uzunluğu ve kılavuzlama hassasiyeti arasındaki ilişki
Yatak uzunluğu ne kadar uzun olursa kılavuzlama hassasiyeti de o kadar yüksek olur.
1)
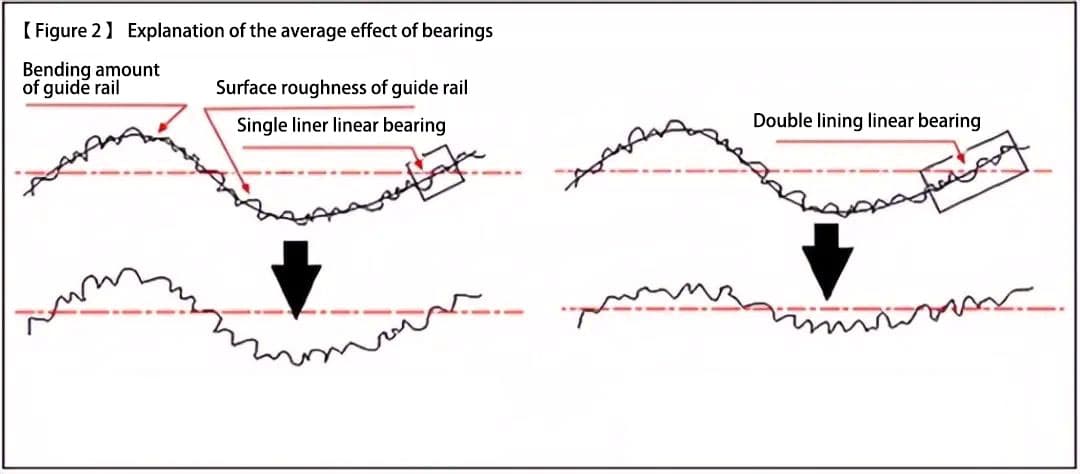
Kılavuz rayın (şaft) kılavuzlama hatasının ortalaması alınarak ürün doğruluğu iyileştirilebilir (ayrıntılar için ilgili nota bakın) ([Şekil 2]).
2)
Kılavuz ray (şaft) arasındaki boşluk hatası azaltılarak ürün doğruluğu artırılabilir ([Şekil 3]).
Rulmanların ortalama etkisi: Doğrusal kılavuz yatağın uzunluğu artırılarak, yatak desteklerinin sayısı artırılır ve kılavuz yüzeyindeki hata faktörlerinin (yüzey pürüzlülüğü ve bükülme deformasyonu) ortalaması alınabilir ve hata faktörünün etkisi yarıdan daha aza bastırılabilir.
Bu nedenle, yatak uzunluğu artırılarak yük taşıma kapasitesi ve kılavuzlama hassasiyeti geliştirilebilir.
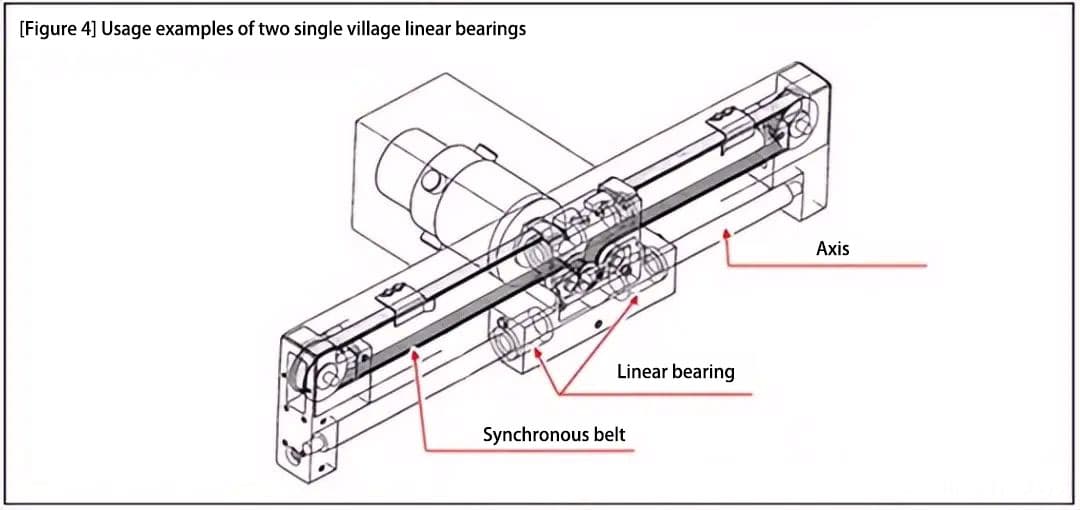
Bu nedenle, lineer rulman tipi [4] (iki tek hatlı tip ile özel bir tasarım kullanan) genellikle yüksek hassasiyetli çalışma ortamlarında bir dereceye kadar kullanılır ([Şekil 4]).
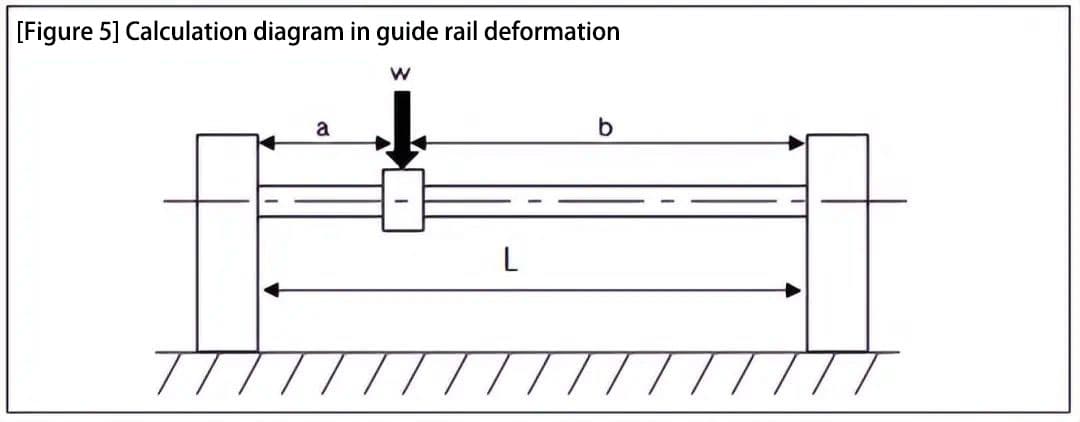
(2) Kılavuz ray (şaft) deformasyonunun hesaplanması ([Şekil 5])
Doğrusal bir yatak ve bir şafttan oluşan doğrusal bir mekanizmada, şaftın deformasyonu aşağıdaki denklem kullanılarak hesaplanabilir:
δ = (W * a3 * b3) / (3 * E * I * L3)
Nerede?
a: Destek uç noktasından yük konumuna olan mesafe
b: a'nın karşı tarafındaki destek uç noktasından yük konumuna olan mesafe
L: Şaft destekleri arasındaki mesafe
E: Young modülü
I: Kesit alanının ikinci momenti
I = πd4/64 ≈ 0.05d4
d: Mil çapı
W: Doğrusal yatak tarafından desteklenen yük (birim: N)
a = b = L/2 olduğunda, δ = W * L3 / (9,6 * E * d4).
Bu nedenle, şaft deformasyonunu azaltmak istiyorsanız, şaft çapını artıran (etkinin 4 katı) veya şaft destekleri arasındaki mesafeyi kısaltan (etkinin 3 katı) bir tasarım yaklaşımı benimsemelisiniz.
(3) Bileşen Malzemelerinin ve Yüzey İşlemlerinin Özellikleri ve Uygulama Örnekleri
Bileşen malzemeler, yüzey i̇şlemleri̇ve lineer rulmanların uygulama örnekleri aşağıdaki tabloda sunulmuştur:
Dış Halka Malzemesi
Yüzey İşlemleri
Tutucu Malzeme
Top Malzemesi
Uygulama Örnekleri:
SUJ2
–
Reçine/SUS440C'ye eşdeğer
SUJ2
Genel aşınma direnci gereksinimi olan kayar kılavuz.
Tozsuz ortamda hafif yük, gıda ve medikal alanlarda kullanılan ekipmanlar.
Yüzey İşlemlerinin Karşılaştırmalı Özellikleri.
Dış Halka Malzemesi:
Yüzey işleme
Özellikler:
SUJ2
–
SUJ2 demirden yapılmıştır ve paslanmaya meyillidir.
Yukarıdaki ile aynı.
Düşük sıcaklıkta siyah krom
Düşük sürtünme katsayısı ve iyi aşınma direnci Işığı yansıtmayan ve iyi ısı emilimi sergileyen siyah renkli, düzgün, ince bir kaplama oluşturabilir.
Yukarıdaki ile aynı.
Ni-P'nin kimyasal kaplaması
Kimyasal maddelere ve korozyona karşı mükemmel direnç, genellikle temiz odalarda kullanılırParlak, manyetik olmayan bir yüzeye sahip sert kaplama.
4. Basit Otomatik Ekipmanlarda Lineer Rulman Uygulama Örneği
Lineer rulmanların özellikleri aşağıda açıklanmıştır:
Orta performanslı, basit, düşük maliyetli kılavuz rulmanlar. (Yüksek maliyet-fayda oranı)
Düşük sürtünme katsayısı, sürücü seçimini kolaylaştırır. (Düşük maliyetli silindir veya orta fiyatlı motor tipi)
ile birleştirerek senkron kayışsessiz ve hafif bir sürüş yapısı tasarımı elde edilebilir.
Dikey yönlendirme durumunda, ağırlık merkezi sürüş yönteminin kullanılması basit ve kompakt bir yapı tasarımı sağlar.
Lineer rulmanların kullanımı ve özellikleri, basit otomatik ekipmanlardaki uygulamalarına ilişkin bir örnek üzerinden aşağıda açıklanmaktadır.
(1) Step motor ve senkron kayış tahriki
Senkron kayış tahrik yapısı sessizlik, hafiflik, düşük maliyet ve yağlama gerektirmemesi gibi avantajlara sahiptir. X/Y/Z ekseni çalışma tablası durumu için olağan tasarım konsepti, üst Y eksenini hafifleterek alt X ekseni motoru üzerindeki yükü azaltmaktır.
Bu nedenle, Y ekseni genellikle bir senkron kayış kullanılarak inşa edilir.
a) [Şekil 1] tipik bir X/Y/Z 3 eksenli tahrik mekanizmasını göstermektedir.
X ekseni lineer kılavuzlardan yapılırken, Y ekseni ve Z ekseni lineer rulmanlar kullanılarak inşa edilmiştir. Tahrik sistemi senkron kayışlar ve vidalı miller kullanır.
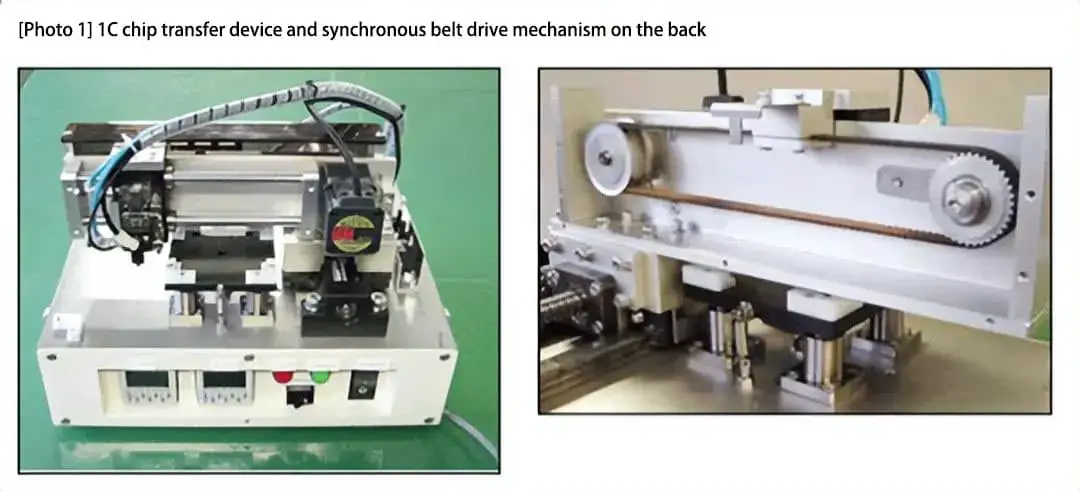
b) [Fotoğraf 1] bir IC çip montaj cihazındaki Y ekseninin bir uygulama örneğini göstermektedir. Y ekseni yönü, bir senkron kayış tarafından ileri geri harekete dönüştürülür.
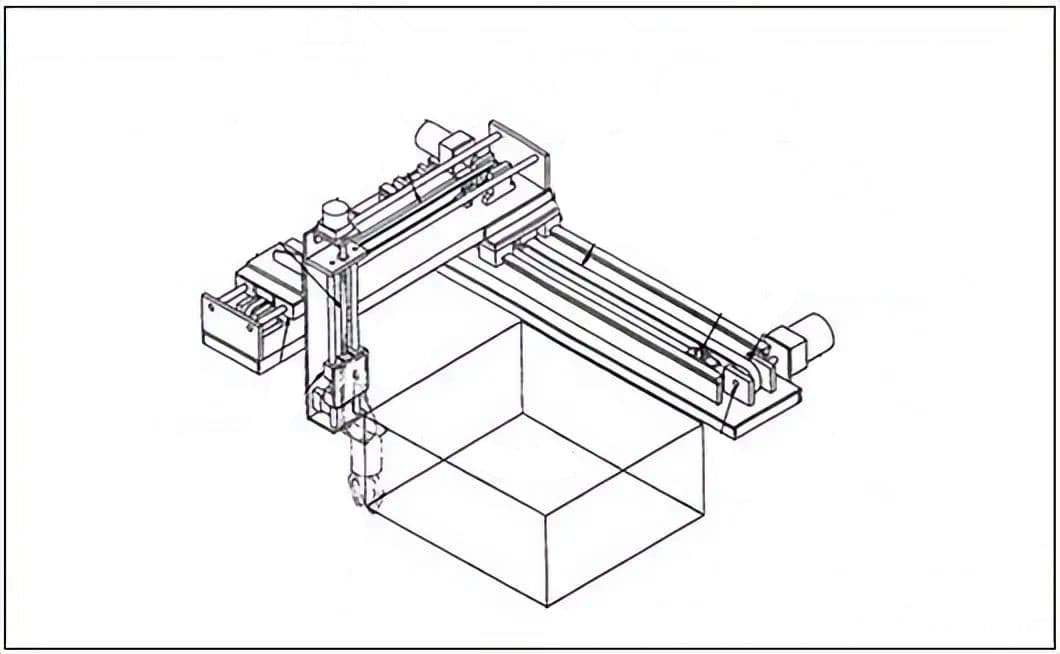
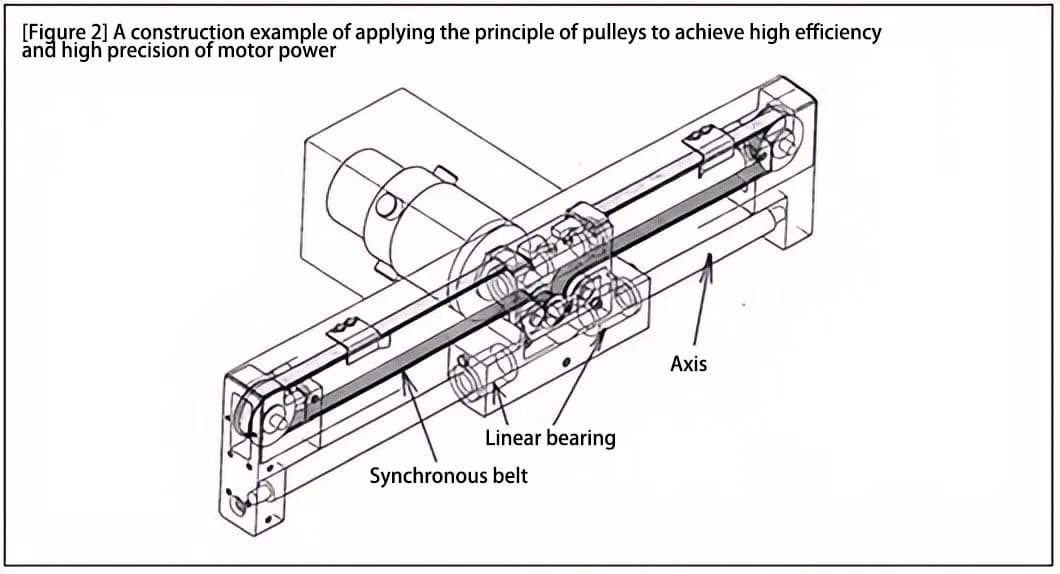
c) [Şekil 2] aşağıdaki özelliklere sahip tek eksenli bir robotun uygulama örneğini göstermektedir:
Taşıma kapasitesini ve kılavuzluk doğruluğunu artırmak için geniş açıklıklı iki lineer rulman kullanılır.
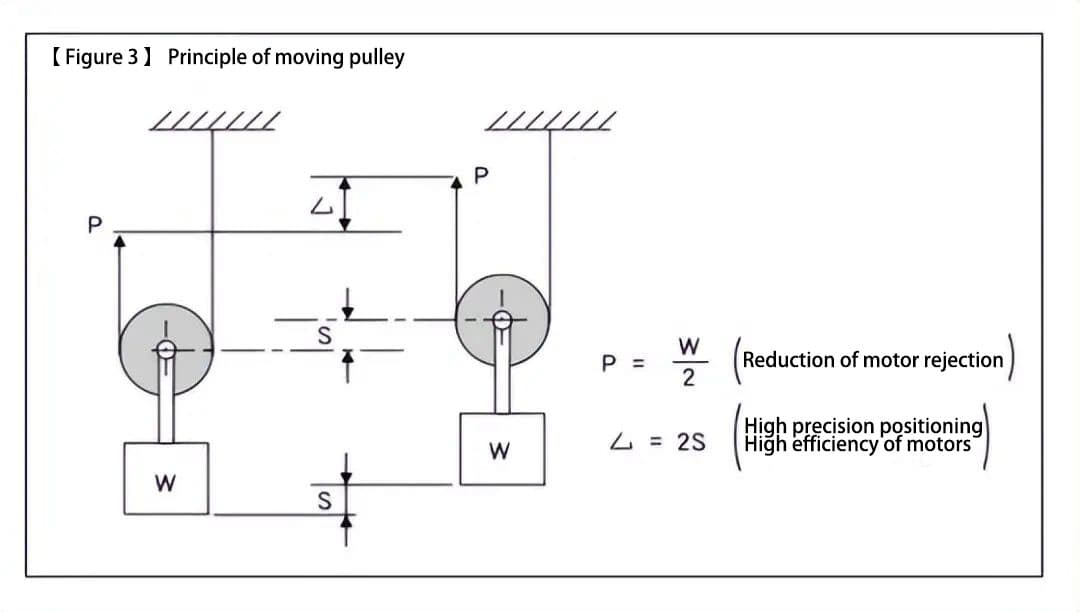
Senkron kayış ve kasnağın tasarımı ve yapısı, motor gücünün yüksek verimliliğini ve yüksek hassasiyetli konumlandırmayı elde etmek için bir yuvarlanan kasnak prensibi ([Şekil 3]) kullanır.
Senkron kayış ve şaft yukarı ve aşağı paralel olarak düzenlenmiştir ve tek eksenli bir yapıda bile şaft ile lineer yatak arasındaki bağıl dönüş sınırlandırılabilir.
Hareketli kasnak prensibi:
Şekil 3'teki kaldırma nesnesini bir S mesafesi kadar yükseltmek için halat kilidinin iki katı yüksekliğe hareket ettirilmesi gerekir, ancak gerekli kuvvet kaldırma nesnesinin ağırlığının sadece yarısı kadardır ve bu da kaldırma nesnesini kolayca kaldırabilir.
Hareket mesafesinin 2 katı
Motor dönüşünün minimum çözünürlüğünü artırabilen konumlandırma hassasiyeti Kasnağın geri tepme ve rölanti hatasını yarı yarıya azaltın Motorun yüksek hızlı dönüş (2x) tahriki, yüksek motor verimliliği sağlar
Yükün 1/2 katı
Düşük güçlü bir motorla çalıştırılabilir (redüksiyon dişlilerine vb. ihtiyaç duymadan)
(2) Step motor ve vidalı mil tahriki
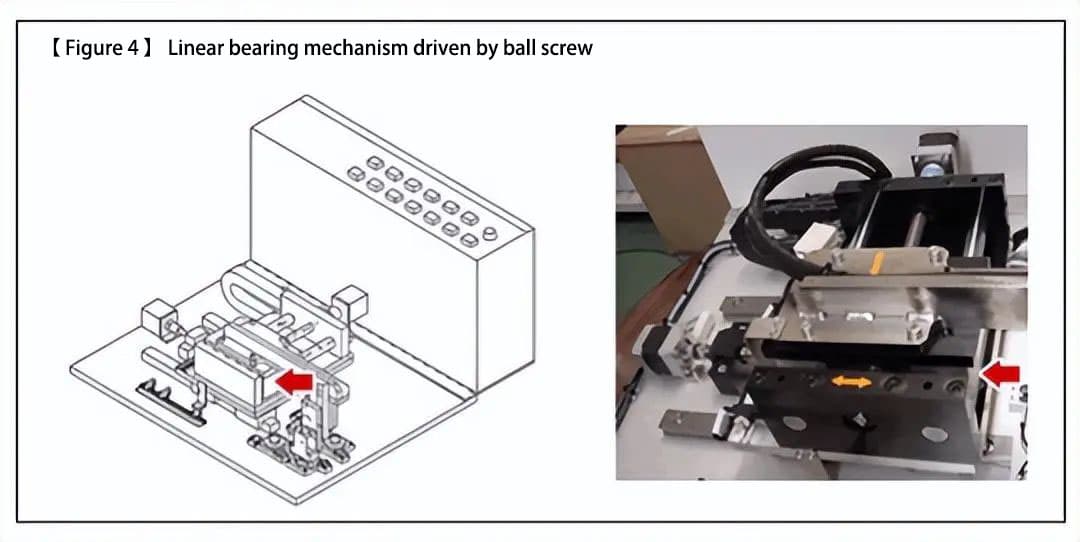
Vidalı milin tahrik yöntemi aşağıdaki özelliklere sahiptir: [1] motorun dönme hareketini doğrudan doğrusal harekete dönüştürür ve [2] bilyalı vida adımı bir redüktör işlevine sahiptir. Tahrik kuvvetinin iletim verimliliği ve motor verimliliği nispeten yüksektir.
[Şekil 4], Y ekseninin doğrusal bir yatak ve bir bilyalı vida kullandığı bir tahrik mekanizmasıdır. Bu genellikle birim besleme gerektiren veya konumlandırma hassasiyeti gereksinimleri olan mekanizmalara uygulanır.
Ek Bilgi:
a) Bir step motorun özellikleri
Step motorlar, düşük hız aralığında (genellikle başlatma ve yavaşlama sırasında) yüksek tork üretme özelliğine sahiptir, bu da onları kısa mesafeli hareket ve çok noktalı konumlandırma kontrolü için uygun hale getirir.
b) Hedef konumlandırma doğruluğuna ulaşmak için gerekli motor hassasiyeti
Hedef konumlandırma hassasiyeti = ±0,01 (mm). Bilyalı vida ucu 10 (mm/dev) seçildiğinde, step motorun gerekli hassasiyeti (bölümler) aşağıdaki formül kullanılarak hesaplanabilir.
(3) Silindir Tahriki
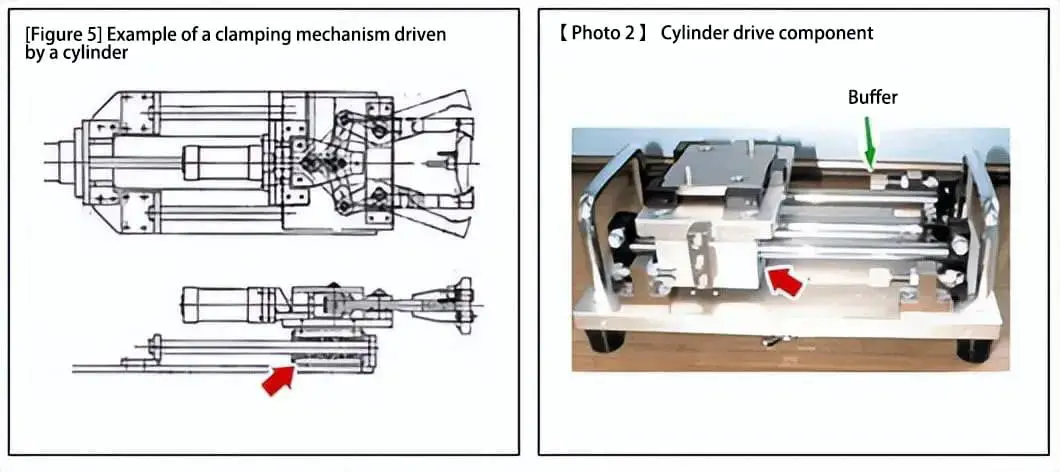
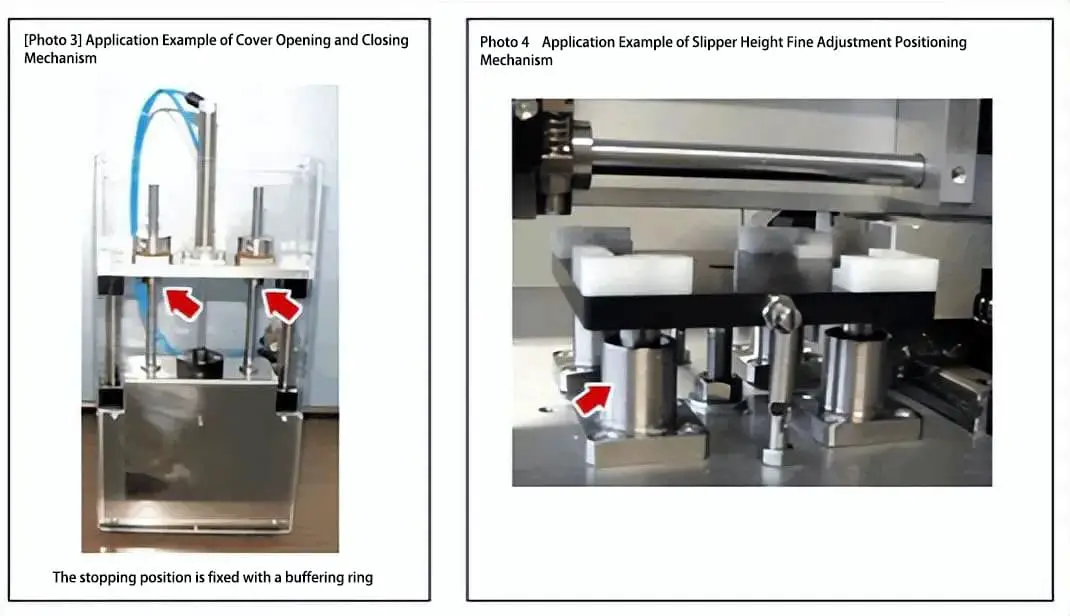
[Şekil 5] bir kelepçe mekanizmasında silindir tahriki için kullanılan bir rulman örneğidir, [Fotoğraf 2] ise manyetik kaplin kullanan bir silindir tahrik mekanizması örneğidir. Her ikisi de kılavuzluk için lineer rulmanlar (oklarla gösterilmiştir) kullanmaktadır.
Bir silindir tahriki ile başlatma ve durdurma hızını kontrol etmek mümkün değildir, bu nedenle dururken darbeyi azaltmak için bir tampon kullanılmalıdır ([Fotoğraf 2]'de gösterildiği gibi).
(4) Dikey yönlendirme örnekleri
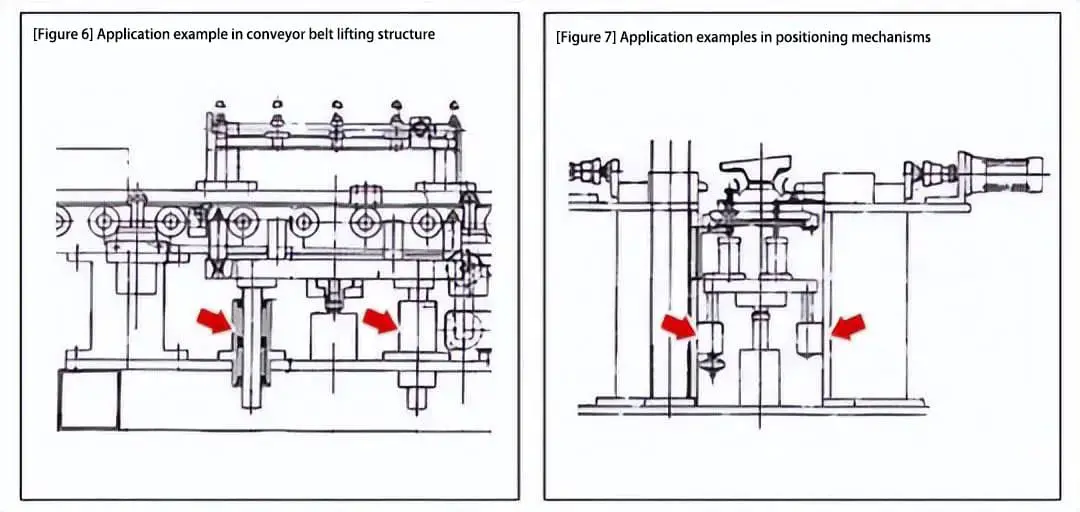
Dikey kılavuzluk, flanşlı lineer rulmanlar kullanılarak elde edilebilir. Lineer rulmanların montajını güvence altına almak için özel bir destek yapısı gerekli değildir, bu da basit ve kompakt bir yapısal tasarım sağlar (sabit kılavuz ray için dikey bir montaj alt tabakasının kurulması gereken kayar kılavuzlar durumunda).
Fotoğraf 4]'teki yapıya benzer şekilde, konveyör bandının alt kısmı için kaldırma kılavuzu ([Şekil 6]'da gösterilmiştir) ve konumlandırma mekanizması ([Şekil 7]'de gösterilmiştir) da flanşlı lineer rulmanlar kullanır.
MachineMFG'nin kurucusu olarak, kariyerimin on yıldan fazlasını metal işleme sektörüne adadım. Kapsamlı deneyimim, sac metal imalatı, talaşlı imalat, makine mühendisliği ve metaller için takım tezgahları alanlarında uzman olmamı sağladı. Bu konular hakkında sürekli düşünüyor, okuyor ve yazıyorum, sürekli olarak alanımın ön saflarında kalmaya çalışıyorum. Bilgi ve uzmanlığımın işiniz için bir değer olmasına izin verin.
Basit bir cam yüzey ile takım tezgahlarının hassasiyetini ortaya çıkardığınızı hayal edin. Doğrusal ızgaralı teraziler, ince çizgileri son derece hassas ölçümlere dönüştürerek tam da bunu yapar. Bu makale, bunların nasıl...
Metal parçalar üzerindeki keskin kenarların nasıl düzeltildiğini hiç merak ettiniz mi? Pah kırma olarak bilinen bu işlem tehlikeli, pürüzlü köşeleri daha güvenli, açılı yüzeylere dönüştürür. Bu makalede...
Dünyanın en iyi rulman markalarının hangileri olduğunu hiç merak ettiniz mi? Bu blog yazısında, olağanüstü kaliteleri, yenilikçilikleri ve performanslarıyla bilinen en iyi rulman üreticilerini keşfedeceğiz.
Perde arkasında dünyaya kimin güç verdiğini hiç merak ettiniz mi? Bu blog yazısında, ışıkları açık tutan en iyi jeneratör üreticilerini derinlemesine inceleyeceğiz...
Alanınızda mükemmelleşmek isteyen hevesli bir makine mühendisi misiniz? Bu blog yazısında, işinizi geliştirebilecek, mutlaka bilmeniz gereken 10 makine mühendisliği tasarım yazılımını keşfedeceğiz.
Aracınızdaki kaynaklı somun ve vidaların bütünlüğünün nasıl sağlandığını hiç merak ettiniz mi? Bu makale, aracınızı sağlam tutan titiz kalite kontrol ve denetim sürecini ortaya koyuyor...
Bir elektrik motorunun aşırı ısınmadan sorunsuz çalışmasını sağlayan şeyin ne olduğunu hiç merak ettiniz mi? Motorlar için güvenli çalışma sıcaklıklarını anlamak, uzun ömürlülükleri ve performansları açısından çok önemlidir. Bu makalede...
Dökümün büyüleyici dünyasını hiç merak ettiniz mi? Bu eski ancak sürekli gelişen üretim süreci günlük hayatımızı sayısız şekilde şekillendiriyor. Bu blog yazısında, dökümün...
Arabanızdaki veya uçağınızdaki dişlilerin nasıl bu kadar sorunsuz çalıştığını hiç merak ettiniz mi? Bu makale, makine mühendisliğinin geleceğini şekillendiren en iyi dişli üreticilerini açıklıyor. Öğreneceksiniz...