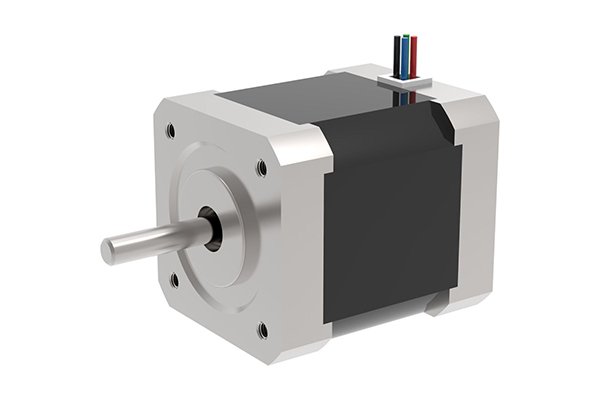
Step Motor
Adım motorunun çalışma prensibi
Bir step motor, bir motor tipi kontrol için özel olarak tasarlanmıştır, elektrik darbelerini açısal yer değiştirmeye dönüştürür.
Step sürücü bir darbe sinyali aldığında, step motorun belirtilen yönde "adım açısı" olarak bilinen önceden belirlenmiş sabit bir açıda dönmesine neden olur.
Motor sabit adım açısında adım adım döner.
Doğru konumlandırma, darbe sayısı kontrol edilerek elde edilebilir ve motor dönüş hızının ve ivmesinin düzenlenmesi, darbe frekansı kontrol edilerek gerçekleştirilebilir.
Motorun dönüş yönünün tersine çevrilmesi, sargılara enerji verilme sırasının değiştirilmesiyle sağlanabilir.
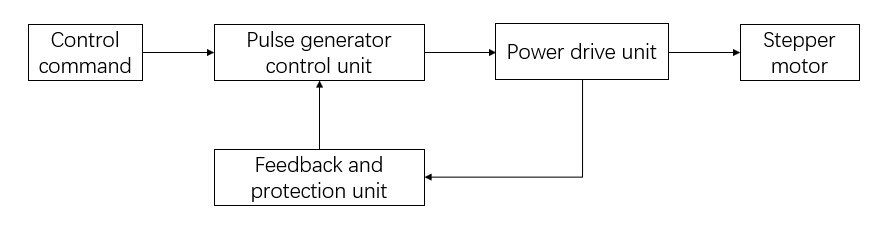
Step motor sürücüsünün çalışma prensibi
Bir step motorun çalışması için özel bir step motor sürücüsü gerekir. Bu sürücü bir impuls kontrol ünitesi, bir güç tahrik ünitesi ve bir koruma ünitesinden oluşur.
Güç tahrik ünitesi, impuls kontrol ünitesi tarafından üretilen darbeleri güçlendirir ve doğrudan step motora bağlanarak step motor ile mikrodenetleyici arasında güç arayüzü görevi görür.
Kontrol talimat ünitesi darbe ve yön sinyallerini alır ve daha sonra güç tahrik ünitesi aracılığıyla step motora iletilen bir dizi karşılık gelen darbe üretir.
Step motor daha sonra belirtilen yönde ayarlanmış bir adım açısıyla döner.
Step motor, maksimum statik tork gibi birkaç temel teknik özelliğe sahiptir, başlangıç frekansıve çalışma frekansı.
Genel olarak, adım açısı ne kadar küçük olursa, maksimum statik tork o kadar büyük olur ve başlatma ve çalışma frekansları o kadar yüksek olur.
Bu nedenle, çalışma modu alt bölüm tahrik teknolojisine güçlü bir vurgu yapmaktadır.
Bu yöntem, step motorun torkunu ve çözünürlüğünü iyileştirir ve düşük frekanslı salınımı tamamen ortadan kaldırır.
Sonuç olarak, alt bölüm sürücü performansı diğer sürücü türlerinden daha üstündür.
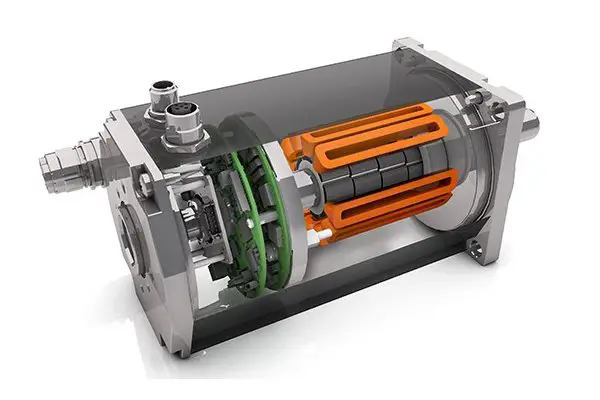
Bir servo motorun içindeki rotor sabit bir mıknatıstır. Sürücü, elektromanyetik bir alan oluşturmak için U/V/W üç fazlı elektriği kontrol ederek rotorun bu manyetik alanın etkisi altında dönmesine neden olur. Motorun kendi kodlayıcısı sürücüye geri besleme sinyalleri sağlar ve sürücü de rotorun dönüş açısını geri besleme değerine ve hedef değere göre ayarlar.
Servo Motor
Servo motorun çalışma prensibi
Yürütme motoru olarak da adlandırılan servo motor, alınan elektrik sinyallerini motor mili üzerinde açısal yer değiştirmeye veya açısal hıza dönüştürmek için otomatik kontrol sistemlerinde bir aktüatör olarak kullanılır.
Servo motorlar iki çeşittir: DC ve AC.
Bir servo motor bir darbe aldığında, yer değiştirme üretmek için karşılık gelen açıyı döndürür. Bunun nedeni, servo motorun kendisinin darbeler yayması ve her dönüş açısının servo motor tarafından alınan darbelerle kapalı bir döngü oluşturan karşılık gelen sayıda darbe yaymasıdır.
Bu, sistemin servo motora gönderdiği darbe sayısını ve aldığı darbe sayısını izlemesine olanak tanıyarak hassas kontrol ve doğru konumlandırma sağlar.
Performans açısından AC servo motorlar DC servo motorlardan daha üstündür. AC servo motorlar sinüs dalgası kontrolü kullanır, bu da düşük tork dalgalanması ve yüksek kapasite ile sonuçlanır.
DC servo motorlar ise trapezoidal dalga kontrolü kullanır ve nispeten düşük performansa sahiptir.
Ancak DC servo motorlarda fırçasız servo motorlar fırçalı servo motorlara göre daha iyi performans gösterir.
Servo motor sürücüsünün çalışma prensibi
Bir servo motorun iç kısmında sabit mıknatıslı bir rotor bulunur.
Aktüatör, elektromanyetik bir alan oluşturmak için U/V/W üç fazlı elektriği kontrol ederek rotorun dönmesine neden olur.
Ayrıca, motorun enkoderi sürücüye geri bildirim sinyalleri sağlar.
Sürücü, geri besleme değerine ve istenen hedef değere göre rotorun dönüş açısını ayarlar.
Fırçalı DC servo motor sürücüsü:
Motorun çalışma prensibi standart bir DC motora benzer.
Aktüatör, içten dışa doğru sıralanmış bir akım döngüsü, hız döngüsü ve konum döngüsünden oluşan üç döngülü bir yapıya sahiptir.
Akım döngüsünün çıkışı motorun armatür gerilimini kontrol eder.
Akım döngüsünün girişi hız döngüsünün PID çıkışıdır, hız döngüsünün girişi konum döngüsünün PID çıkışıdır ve konum döngüsünün girişi belirtilen giriştir.
Kontrol şeması yukarıda gösterilmiştir.
Fırçasız DC servo motor sürücüsü:
Güç kaynağı DC'dir ve dahili üç fazlı bir invertör tarafından U/V/W AC gücüne dönüştürülür.
Sürücü ayrıca üç döngülü bir kontrol yapısı (akım döngüsü, hız döngüsü, konum döngüsü) kullanır ve sürüş kontrol prensibi daha önce açıklananla aynıdır.
AC servo motor sürücüsü:
Sistem iki ayrı modüle ayrılabilir: her biri farklı işlevlere sahip güç paneli ve kontrol paneli.
Kontrol paneli, invertörün çıkış gücünü değiştirmek ve üç fazlı sabit mıknatıslı senkron AC servo motorun kontrolünü sağlamak için sürücü sinyali için sürücü devresi olarak hizmet veren ilgili bir algoritma aracılığıyla PWM sinyalleri çıkarır.
Güç tahrik ünitesi ilk olarak girişteki üç fazlı elektriği veya belediye elektriğini üç fazlı tam köprü doğrultucu devresi aracılığıyla doğru akım elektriğine dönüştürür.
Üç fazlı sabit mıknatıslı senkron AC servo motor daha sonra üç fazlı veya belediye elektriğinin düzeltilmesini takiben üç fazlı sinüzoidal PWM voltaj tipi invertörün komütatörü tarafından tahrik edilir.
Bu işlem basitçe bir AC-DC-AC dönüşümüdür.
Kontrol ünitesi tüm AC servo sisteminin çekirdeğidir ve sistem pozisyon kontrolü, hız kontrolü, tork kontrolü ve akım kontrolü gerçekleştirir.
Servo motor ve step motorun performans karşılaştırması
Kontrol Doğruluğu
Bir adım motorunun ne kadar çok fazı ve atımı varsa, doğruluğu o kadar artar.
Servo motor kendi enkoderinden geri bildirim alır ve enkoder ne kadar çok ölçeğe sahipse hassasiyeti o kadar yüksek olur.
Düşük Frekans Karakteristiği
Step motorlar düşük hızlarda düşük frekanslı titreşime eğilimlidir.
Bununla mücadele etmek için, düşük hızda çalışma genellikle sönümleme veya alt bölüm teknolojisi kullanır.
Buna karşılık, servo motorlar düşük hızlarda bile titreşim olmadan sorunsuz çalışır.
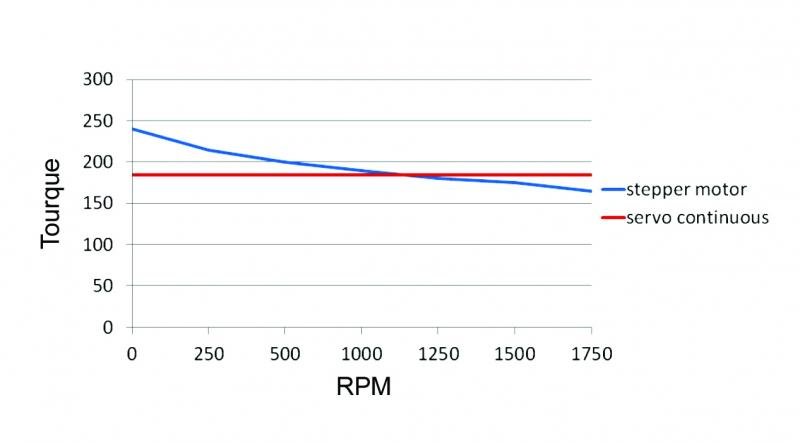
Tork-frekans Karakteristiği
Bir step motorun çıkış torku, hızdaki artışla birlikte azalır ve yüksek hızlarda önemli ölçüde düşer.
Buna karşılık, bir servo motor nominal hızında sabit tork çıkışı ve nominal hızında sabit güç çıkışı sağlar.
Aşırı Yük Kapasitesi
Bir step motor aşırı yük kapasitesinden yoksunken, bir servo motor güçlü aşırı yük kapasitesine sahiptir.
Operasyon Performansı
Step motorlar açık döngü kontrolü altında çalışır, bu da onları başlangıç frekansı çok yüksekse veya yük çok ağırsa adım kaybetmeye veya dönüşü durdurmaya duyarlı hale getirir. Hız çok yüksekse, aşırı aşıma da neden olabilir.
Öte yandan, AC servo sürücü sistemi kapalı döngü kontrolü kullanır. Servo motorun sürücüsü, motor kodlayıcısının geri besleme sinyalini doğrudan örnekleyerek dahili konum ve hız kontrol döngüleri oluşturur. Sonuç olarak, step motorların adım kaybetme veya aşma olasılığı daha düşüktür, bu da kontrol performansını daha güvenilir hale getirir.
Hız Tepki Performansı
Step motorların statik durumdan çalışma hızına ulaşması yüzlerce milisaniye sürer.
Buna karşılık, AC servo sistemleri mükemmel hızlanma performansına sahiptir, tipik olarak sadece birkaç milisaniye sürer, bu da onları hızlı başlatma ve durdurma gerektiren uygulamalar için uygun hale getirir.