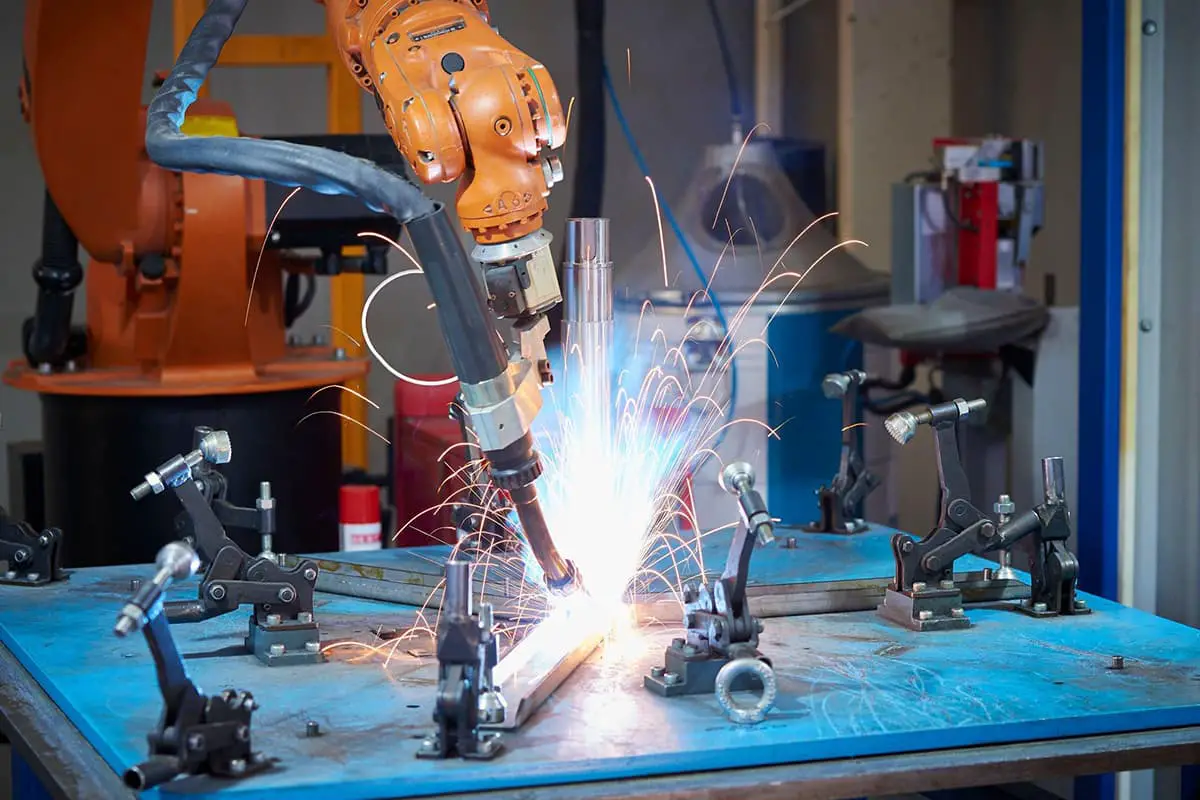
Üreticilerden bir kaynak robotu seçerken veya akıllı bir kaynak robotu satın alırken, performans özelliklerini tam ve doğru olarak anlamak çok önemlidir. Akıllı kaynak robotunun ana teknik özelliklerinde yeterlilik, iş parçalarını kaynaklarken doğru şekilde çalıştırmak için ön koşuldur.
Tipik olarak, kaynak robotu üreticilerinin ürün kılavuzları oldukça temel teknik özellikler sağlar ve bazı teknik performans göstergelerinin, iş iletişimleri ve yerinde incelemeler yoluyla kullanıcının gerçek durumuna dayalı olarak derinlemesine anlaşılması gerekir.
Kaynağın ana teknik özellikleri robot üreti̇ci̇leri̇ iki ana kategoriye ayrılabilir: kaynak robotları için genel teknik göstergeler ve kaynak robotları için özel teknik göstergeler.
I. Kaynak Robotları için Genel Teknik Göstergeler
1. Serbestlik Derecesi:
Bu, kaynak robotunun esnekliğini yansıtan önemli bir göstergedir. Genel olarak, üç serbestlik derecesi kaynak robotunun çalışma alanındaki herhangi bir noktaya ulaşabilir.
Bununla birlikte, kaynak işleminin yalnızca uzayda belirli bir konuma ulaşması değil, aynı zamanda kaynak tabancasının veya kaynak maşasının uzamsal duruşunu da sağlaması gerekir.
Bu nedenle, ark kaynağı robotları ve kaynak kesme robotları en az beş serbestlik derecesine, punta kaynağı robotları ise altı serbestlik derecesine ihtiyaç duyar.
2. Yük Kapasitesi:
Bu, kaynak tabancası ve kabloları da dahil olmak üzere kaynak robotunun ucunun taşıyabileceği nominal yükü ifade eder, kesici aletler ve gaz boruları, kaynak maşaları ve kabloları, soğutma suyu boruları vb.
Bu nedenle, ark kaynağı robotlarının ve kaynak kesme robotlarının yük kapasitesi 6-10 kg'dır. Eğer bir punta kaynağı Robot entegre bir transformatör ve entegre kaynak maşası kullanıyorsa, yük kapasitesi 60-90kg olmalıdır. Ayrı kaynak maşası kullanılıyorsa, yük kapasitesi 40-50kg olmalıdır.
3. Kaynak Robotlarının Çalışma Alanı:
Üreticiler tarafından sağlanan çalışma alanı, herhangi bir uç efektör takılmadan kaynak robotunun ulaşabileceği maksimum alandır ve grafiksel olarak gösterilir. Kaynak tabancası veya kaynak maşası gibi ekipmanlar takıldıktan sonra kaynak tabancasının duruşunun korunması gerektiğine dikkat etmek önemlidir.
Gerçek kaynak alanı üreticinin sağladığından daha küçük olacaktır ve üreticinin gerçek ihtiyaçlarını karşılayıp karşılamadığını belirlemek için ölçekli çizim veya modelleme yöntemleriyle dikkatlice hesaplamak gerekir.
4. Kaynak robotunun maksimum çalışma hızı:
Bu, kaynak üretiminde üretim verimliliğini etkileyen önemli bir göstergedir. Kaynak robotu üreticisinin ürün kılavuzunda, kaynak robotunun bileğinin ucunda her bir eksenin bağlanması koşuluyla ulaşabileceği maksimum hız verilmektedir.
Kaynak için gereken düşük hız nedeniyle, maksimum hız yalnızca kaynak tabancasının veya kaynak kelepçesinin konumlandırılmasını, boşta hareketini ve son dönüş süresini etkiler.
5. Noktadan noktaya tekrarlama doğruluğu:
Bu, kaynak robotu performansının en önemli göstergelerinden biridir. Punta kaynak robotları için, kaynak robotunun kaynak süreci gereksinimleri, doğrulukları kaynak kelepçesinin elektrot çapının 1/2'sinden daha azına, yani +1-2 mm'ye ulaşmalıdır; Ark kaynağı robotları için, 0,2-0,4 mm olan kaynak teli çapının 1/2'sinden daha az olmalıdır.
6. Yörünge tekrarlama doğruluğu:
Bu gösterge ark kaynağı robotları ve kaynak kesme robotları için çok önemlidir, ancak ölçüm süreci nispeten karmaşık olduğu için çeşitli robot üreticileri bu göstergeyi sağlayamaz. Genellikle, çeşitli robot üreticileri bu ölçümü dahili olarak gerçekleştirir ve doğruluk verilerini talep etme konusunda ısrarcı olmalıdır.
Ark kaynağı robotları ve kaynak kesme robotları için, yörünge tekrarlama doğruluğu, kaynak telinin çapının veya kesici takımın kesme deliğinin çapının 1/2'sinden az olmalı ve genellikle + 0,3 ~ 0,5 mm'nin altına ulaşmalıdır.
7. Kullanıcı Bellek Kapasitesi:
Bu, kaynak robotu kontrolöründeki ana bilgisayar belleğinin kapasitesini ifade eder. Kaynak robotunun saklayabileceği öğretme programının uzunluğunu gösterir, bu da işlenebilecek iş parçasının karmaşıklığı veya başka bir deyişle maksimum öğretme noktası sayısı ile ilgilidir.
Genellikle robot talimatlarını depolayabilen katsayı ve depolanan toplam bayt sayısı ile ifade edilir. Maksimum öğretim noktası sayısı ile de temsil edilebilir.
8. Enterpolasyon Fonksiyonu:
Ark kaynağı robotları, kaynak kesme robotları ve punta kaynağı robotları için hepsinin doğrusal enterpolasyon ve dairesel enterpolasyon işlevlerine sahip olması gerekir.
9. Dil Dönüştürme İşlevi:
Her robot üreticisinin kendi özel dili vardır, ancak ekran görüntüsü birden fazla dilde olabilir. Örneğin, bir Yaskawa kaynak robotu Çince, Japonca, İngilizce, Almanca, Fransızca ve diğer dillerde görüntülenebilir.
10. Kendi kendine teşhis Fonksiyonu:
Kaynak robotları, ana bileşenlerin otomatik kontrolü, ana fonksiyon modülleri, arıza alarmları, arıza yeri göstergesi vb. gibi çeşitli fonksiyonlara sahip olmalıdır. Bu, kaynak robotlarının hızlı onarımını sağlamak ve güvence vermek için çok önemlidir.
Bu nedenle, kendi kendine teşhis işlevi kaynak robotlarının önemli bir özelliğidir ve kaynak robotu üreticilerinin ürün bütünlüğünün ana göstergelerinden biridir.
Dört ana robot ailesinin hepsinde 30-50 kendi kendine teşhis işlevi öğesi bulunur ve teşhis sonuçlarını ve alarmları belirlenen kodlar ve gösterge ışıkları aracılığıyla kullanıcılara gösterir.
11. Kendini Koruma ve Güvenlik Özellikleri:
Kaynak robotları kendini koruma ve güvenlik özelliklerine sahiptir. Bunlar öncelikle, kaynak robotunun yaralanmalara neden olmasını veya yardımcı ekipmana zarar vermesini önleyen tahrik sistemi aşırı ısınması kendi kendine kapanma, eylem sınırı aşımı kendi kendine kapanma ve aşırı dönme kendi kendine kapanma gibi koruma mekanizmalarını içerir.
Kaynak robotunun çalışan kısımlarına dokunsal veya yakınlık sensörleri takılarak gerektiğinde otomatik olarak çalışmayı durdurması sağlanır.
II. Kaynak Robotları için Teknik Özellikler
1. Uygulanabilir robotik kaynak veya kesme yöntemleri:
Bu, özellikle ark kaynağı robotları için kritiktir ve esasen robotun kontrol ve tahrik sistemlerinin parazit direnci yeteneklerini yansıtır.
Tipik olarak, ark kaynağı robotları sadece gazaltı kaynak yöntemlerini kullanır. Metal Ark Kaynak (GMAW), bu yöntemler yüksek frekanslı ark başlatma gerektirmediğinden ve robotun kontrol ve tahrik sistemleri özel parazit önlemlerinden yoksun olduğundan.
Tungsten İnert Gaz (TIG) kaynağı kullanabilen ark kaynağı robotları, farklı bir dizi parazit karşı önlemi ile donatılmış yeni yeniliklerdir. Kullanıcılar için bu, bir robot seçerken göz önünde bulundurulması gereken önemli bir husustur.
2. Salınım Fonksiyonu:
Bu, kaynak prosesi performansını doğrudan etkilediğinden ark kaynağı robotları için son derece önemlidir. Salınım yeteneklerinin kapsamı bu robotlar arasında büyük farklılıklar gösterir.
Bazıları yalnızca sabit bir dizi salınım modu sunarken, diğerleri X-Y düzlemi içinde salınım modlarının ve parametrelerinin keyfi olarak ayarlanmasına izin verir. Ancak en uygun seçim, salınım modlarının ve parametrelerin 3D uzayda (X-Y-Z) keyfi olarak ayarlanmasına izin veren robotlar olacaktır.
3. Kaynak İşlem Noktası Öğretim Fonksiyonu:
Bu, kaynak eğitimi sürecinde özellikle yararlı bir özelliktir. İlk olarak, kaynak makinesi üzerindeki belirli bir noktanın konumunun öğretilmesini içerir. kaynak dikişiardından kaynak torcunun veya kelepçenin duruşu ayarlanır. Duruş ayarı sırasında orijinal öğretim pozisyonu değişmeden kalır.
Esasen, kaynak robotu duruş ayarlamalarının neden olduğu konum değişikliklerini otomatik olarak telafi edebilir, koordinat noktasının stabilitesini sağlar ve böylece operatörün işini kolaylaştırır.
4. Kaynak İşlemi Arızası Kendi Kendine Teşhis ve Kendi Kendine İşleme Fonksiyonu:
Bu, kaynak robotlarında ark kaynağı teli yapışması, tel kopması ve punta kaynağı elektrodu yapışması gibi yaygın kaynak işlemi hatalarını ifade eder.
Bu arızalar meydana gelir ve derhal giderilmezse, kaynak robotunun hasar görmesi veya iş parçalarının hurdaya ayrılması gibi büyük kazalara neden olabilir.
Bu nedenle, kaynak robotlarının bu tür arızaları tespit edebilmesi ve gerçek zamanlı olarak otomatik olarak durdurup uyarabilmesi çok önemlidir.
5. Ark Başlatma ve Sonlandırma Fonksiyonu:
Robot kaynağının kalitesini sağlamak için parametre değişikliklerine ihtiyaç vardır. Bir kaynak robotu ile kaynak üretim sürecinde, öğretme aşamasında ayarlar ve modifikasyonlar yapılmalıdır. Bu aynı zamanda bir kaynak robotunun temel işlevlerinden biridir. ark kaynak robotu.