Identifying Mechanical Loosening with Vibration Spectrum Analysis
Have you ever encountered mysterious vibrations in your machinery? This article explores the fascinating world of vibration spectrum analysis and its role in diagnosing mechanical loosening. Our team of experienced engineers will guide you through real-world examples, revealing how this powerful technique can help you identify and resolve common issues, saving you time and money. Get ready to dive into the intriguing realm of predictive maintenance!
Mechanical looseness is generally classified into two primary categories: structural looseness and rotating component looseness. This classification helps in identifying the root cause and implementing appropriate corrective measures.
The underlying causes of mechanical looseness are multifaceted and can include:
Poor installation or assembly practices
Prolonged wear of components
Damage to the foundation or base structure
Deterioration or failure of individual parts
Excessive clearances in component fits
Improper tightening of fasteners
Thermal expansion and contraction cycles
Mechanical looseness acts as a vibration amplifier, exacerbating existing issues such as imbalances and misalignments. This amplification effect can lead to a cascade of failures as the looseness progresses, potentially causing accelerated wear, fatigue, and even catastrophic breakdowns in severe cases.
While there is no universally accepted standard for categorizing looseness types, industry practitioners and vibration analysts commonly recognize three distinct types of mechanical looseness. Each type exhibits unique characteristics in terms of vibration frequency spectra and phase relationships:
Type A: Structural looseness (e.g., loose mounting bolts, cracked or weak foundation)
Type B: Rotating component looseness (e.g., excessive clearance between rotating and stationary components)
Type C: Non-linear looseness (e.g., misaligned or distorted mounting feet)
1. Type A: loose structure frame and foundation
1. Loose phenomenon and treatment measures
This type of looseness encompasses the following faults:
• Loose structures or inadequate strength in the equipment footing, base plate, and concrete foundation.
• Deterioration or breakage of the grout.
• Deformation of the frame or base.
• Loose anchor bolts, etc.
These looseness issues can be easily observed on the site, and their destructive impact is usually significant. In severe cases, they can exacerbate the imbalances or misalignments of the equipment.
Treatment measures:
Strengthening the foundation and correcting the structure.
For equipment that is already out of balance or misaligned, it is important to address the imbalance or misalignment simultaneously.
2. Typical loosening frequency spectrum and basic characteristics
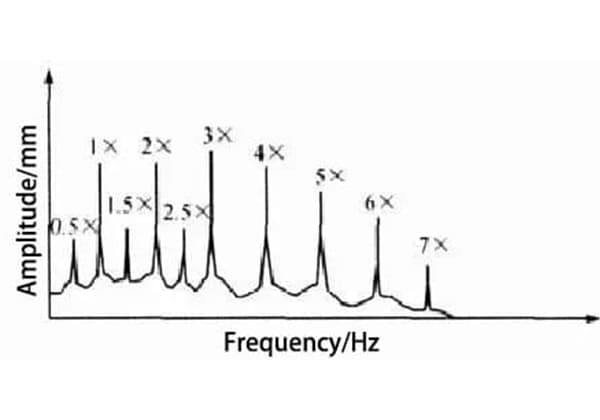
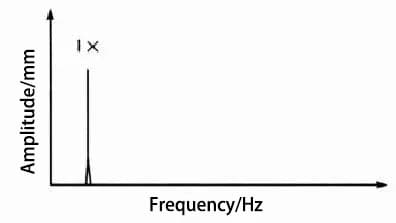
The typical frequency spectrum of looseness is depicted in Figure 1, and the fundamental characteristics revealed by the looseness are presented in Table 1.
Fig. 1 Typical loosening spectrum diagram of type A
Table 1 Basic Characteristics Reflected by Type A Looseness
Parameter
Basic characteristics
Frequency
The loosening frequency spectrum is dominated by higher 1×-turn frequency vibration
Vibration
Generally, the radial vibration is large, especially the vertical vibration is large, and the axial vibration is small or normal
Phase
Comparing the vibration in the vertical and horizontal directions, it can be found that the vibration has directivity, and the phase difference is 0 ° or 180 °
Notes:
This typical looseness feature is comparable to the vibration caused by an unbalanced or eccentric rotor, and they can be differentiated based on phase.
Usually, high vibration is concentrated on one rotor only (such as the driver, driven machine, or gearbox), which distinguishes it from imbalance or misalignment as high vibration caused by these issues is not limited to just one rotor.
In some exceptional cases, such as bolts used to secure the pump bearing seat, the force is in the axial direction. If these bolts become loose, the axial 1x-speed vibration will be elevated, resembling a misalignment fault. However, once these bolts are tightened, the vibration will be reduced.
2. Type B: looseness caused by rolling motion or structural fracture and bearing pedestal fracture
1. Loose phenomenon and treatment measures
This type of looseness only occurs when the following faults occur:
A damaged structure or bearing base.
An instability caused by unequal length of support feet, at times.
Loose bearing seat bolts in rare cases.
Minor fitting issues with loose bearings or improper parts (with no significant impact).
These looseness issues can also be observed on-site, but the matching problems of internal components can only be detected and confirmed through disassembly and examination.
Treatment measures:
The vibration can be reduced by replacing damaged parts, fixing the fit of incorrect parts, tightening bolts, etc.
2. Typical loosening frequency spectrum and basic characteristics
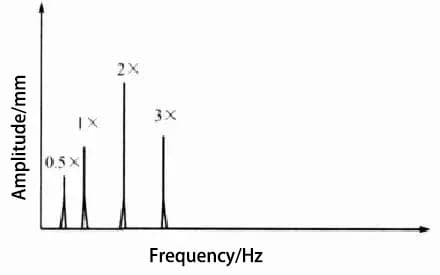
The typical frequency spectrum of looseness is depicted in Figure 2, and the fundamental characteristics reflected by the looseness are presented in Table 2.
Fig. 2 Typical loosening spectrum diagram of type B
Table 2 Basic Characteristics Reflected by Type B Looseness
Parameter
Basic characteristics
Frequency
Multiple turn frequency harmonics, when the radial 2×-turn frequency amplitude exceeds 50% of the 1×-turn frequency amplitude, it indicates that such a fault occurs.
Vibration
The amplitude is somewhat unstable. When the load is high, the vibration increases greatly.
Phase
If a strobe lamp is used to collect phase readings, two unstable reference points will usually be displayed.
Notes:
• Under normal conditions, these vibration symptoms will not occur if there are no other excitation forces.
• If the looseness is caused by the loose bearing of the bearing pedestal or the loose parts on the shaft, the vibration will remain mostly at the 1x- and 2x-speed until it worsens into a pulsation or impact.
In this case, the pulsation will result in the non-linearity of the time domain waveform, leading to many harmonics that are more severe than Type C looseness.
• Sometimes, the failure of the coupling is further exacerbated by the fracture and looseness of the equipment foot, causing wear and looseness in the elastic block of the coupling. This spectrum also displays harmonics that surpass Type C looseness.
3. Type C: looseness caused by loose bearings or improper fitting between components
1. Loose phenomenon and treatment measures
This type of looseness encompasses the following faults:
• Loose bearings in the bearing pedestal.
• Excessive internal clearance in the bearings.
• Loose bearing bushes in the bearing seat.
• Loose rotor.
• Loose bearings or running rings, etc.
These issues can be observed by opening the end cover of the bearing pedestal. This type of looseness is directly associated with the bearings and shafts of rotating equipment.
When the looseness is severe, the bearings, shafts, or related mating parts will suffer wear, or in severe cases, the rotating equipment may become completely blocked.
Treatment measures:
It can be solved by replacing the bearing or bushing and adjusting the fit between components.
2. Typical loosening frequency spectrum and basic characteristics
Typical loosening frequency spectrum is shown in Fig. 3, and the basic characteristics reflected by its loosening are shown in Table 3.
Fig. 3 Typical loosening spectrum diagram of type C
Table 3 Basic Characteristics Reflected by Type C Looseness
Parameter
Basic characteristics
Frequency
The harmonics of multiple frequency conversion sometimes reach 10× or even 20×, which are very obvious in the spectrum.If the harmonic amplitude becomes larger, the frequency component with an interval of 1/2 times the frequency will also be generated (i.e. 0.5 ×, 1.5 ×, 2.5 ×). Sometimes there is even 1/3 times of the frequency conversion harmonic.
Vibration
This looseness tends to produce highly directional vibration with relatively high amplitude.
phase
Generally, the phase measurement of this type of loose fault is somewhat unstable, but if the vibration itself becomes highly directional, the difference between the horizontal and vertical directions will be close to 0 ° or 180 °.
Notes:
• Looseness may also occur after the component has reached its operating temperature and has undergone thermal expansion.
• The presence of a distinct 1/2x-peak suggests that a more complex loosening issue is present, possibly involving friction.
• When the rotor, such as a pump impeller, is loose, the phase changes after each start.
• The vibration spectrum of this type of looseness, characterized by many 1×-speed harmonics, actually indicates a more severe problem, such as looseness in the bearings and ring running.
This issue can result in shaft clamping and significant equipment failure.
As the founder of MachineMFG, I have dedicated over a decade of my career to the metalworking industry. My extensive experience has allowed me to become an expert in the fields of sheet metal fabrication, machining, mechanical engineering, and machine tools for metals. I am constantly thinking, reading, and writing about these subjects, constantly striving to stay at the forefront of my field. Let my knowledge and expertise be an asset to your business.
Are you an aspiring mechanical engineer looking to excel in your field? In this blog post, we'll explore the top 10 must-know mechanical engineering design software that can elevate your…
In this blog post, we'll explore the world of mechanical seals and introduce you to the top manufacturers who ensure your equipment runs smoothly. Discover the innovations and expertise that…
Imagine a world where machines can see, feel, and respond to their surroundings with unparalleled precision. This is the promise of novel sensing technologies in mechanical engineering. By integrating advanced…
Have you ever wondered how the tiniest measurement can impact the quality of a machine? This article dives into the fascinating world of mechanical measurement, revealing how precision in dimensions,…
Have you ever wondered which bearing brands are the best in the world? In this blog post, we'll explore the top bearing manufacturers known for their exceptional quality, innovation, and…
Have you ever wondered what keeps an electric motor running smoothly without overheating? Understanding the safe operating temperatures for motors is crucial for their longevity and performance. In this article,…
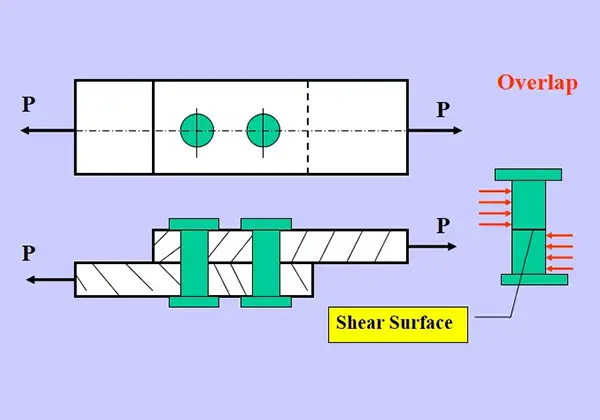
Have you ever wondered how the tiny rivets holding massive structures together actually work? In this article, we'll unravel the fascinating world of rivet connections, exploring their types, strength calculations,…
Have you ever wondered about the fascinating world of lithography machines? These marvels of engineering play a crucial role in the production of semiconductors, enabling the creation of intricate patterns…
Ever wondered how your favorite products get their labels and codes? This article unveils the top inkjet printer manufacturers shaping the world of product identification. From cutting-edge technology to global…