Exploring the Vibration Threshold for Electric Motor Bearings
How do you determine the maximum vibration level for electric motor bearings? This crucial question touches on both operational limits and post-installation testing. The article explores international and national standards for vibration limits, considers load conditions, and discusses practical measurement approaches. By reading, you’ll understand the factors influencing motor vibration and learn how to accurately measure and interpret these vibrations under various operating conditions.
Frequently, people ask how much the maximum vibration of a motor bearing should not exceed. This question might actually be asking two things. One, what is the maximum vibration under which a motor bearing can operate; and the other, after the motor is installed and vibration tested, what should the maximum vibration be.
For the former, one can verify and calculate the bearing selection by considering the environmental vibration as an impact load. In fact, most friends are asking about the latter, that is, during the operation of the motor bearing, what should be the maximum vibration value of the motor and bearing as a whole. Let’s discuss this here.
There are many corresponding international standards and national standards for the limit values of motor bearing vibration. Since we have standards, why do many people still have issues with the maximum limit? The common question encountered is: are these limits for no-load or full-load? Are these limit values RMS or other values?
First, let’s look at ISO2372 as shown in the following figure:
Vibration Severity Range Limits (Velocity)
Vibration Severity Ranges for Machines Belonging to:
From ISO 2372
In/Sec(PK)
MM/Sec(RMS)
Class I
Class II
Class III
Class IV
<20HP
20-100 HP
>100HP
>100HP
0.015
0.28
A
A
A
A(Good)
0.025
0.45
0.039
0.71
B
B
B
B(Allowable)
0.062
1.12
0.099
1.8
C
C
C
C(Tolerable)
0.154
2.8
0.248
4.5
D
D
D
D(Not Permissable)
0.392
7.1
0.617
11.2
0.993
18
1.54
28
2.48
45
3.94
71
It’s easy to see in the table that the units of vibration intensity, including velocity RMS and displacement peak, are listed on the left.
So, the question arises, should an engineer measure a motor under no-load or full-load conditions? From our understanding of motor bearings, the torque load of the motor itself, whether it’s no-load or full-load, does not significantly impact the bearings.
Therefore, from the bearings’ perspective, whether it’s no-load or full-load does not affect the outcome. However, this doesn’t take into account the motor’s stator. In actual working conditions, the status of the motor’s stator and the load can affect the overall vibration of the motor body. Note that this is not bearing vibration but overall vibration.
Therefore, when measuring a motor, there is a difference between no-load and full-load. This must be taken into consideration in actual measurements.
According to ISO10816, equipment vibration should be tested under all possible expected operating states, with the maximum value obtained from the tests serving as a representative of vibration intensity.
In other words, the maximum value is taken among all operating states of the equipment. These states include not only no-load and full-load, but more rigorous considerations might also include other intermediate states.
The reason for this provision in the standard is to consider the maximum damage vibration can do to the equipment and set the maximum allowable vibration intensity. (If engineers understand this principle, they will know why displacement is chosen for low-speed vibrations, velocity for mid-speed, and acceleration for high-speed vibrations.)
Of course, the aforementioned indications pertain to the vibration severity of general equipment. For motors, there are some more detailed standards.
For instance, GB/T 5171.1-2014 stipulates the rated speed vibration limit of small power converter motors under no-load conditions. The standard clearly defines that the measured object is no-load vibration. Hence, under this standard, only no-load vibration needs to be considered.
In practical scenarios, motor factory engineers can choose to measure motor vibration in reference to the corresponding motor standards. When selecting, it’s not just about reading the tables in the standards, the accompanying explanations within the standards can be quite crucial. If a certain type of motor doesn’t have a respective standard, it should at the very least comply with the stipulations for general equipment in ISO 2371.
Furthermore, apart from the regulations in the aforementioned standards, if a motor user provides a limit for motor vibration, the motor factory needs to measure in accordance with the customer’s standards.
As the founder of MachineMFG, I have dedicated over a decade of my career to the metalworking industry. My extensive experience has allowed me to become an expert in the fields of sheet metal fabrication, machining, mechanical engineering, and machine tools for metals. I am constantly thinking, reading, and writing about these subjects, constantly striving to stay at the forefront of my field. Let my knowledge and expertise be an asset to your business.
Imagine unlocking the precision of machine tools with a simple glass surface. Linear grating scales do just that, transforming fine lines into highly accurate measurements. This article explores how these…
What kind of questions can help you ace a mechanical engineering interview? This article dives into the top 20 questions that test various aspects of mechanical engineering, from transmission systems…
Have you ever marveled at the versatility of springs in mechanical engineering? From automotive suspensions to precision instruments, these unsung heroes play a crucial role. In this blog post, we'll…
Is your hydraulic system not performing as expected? Understanding how to calculate hydraulic pump efficiency can be a game-changer. This article breaks down the process into simple steps, helping you…
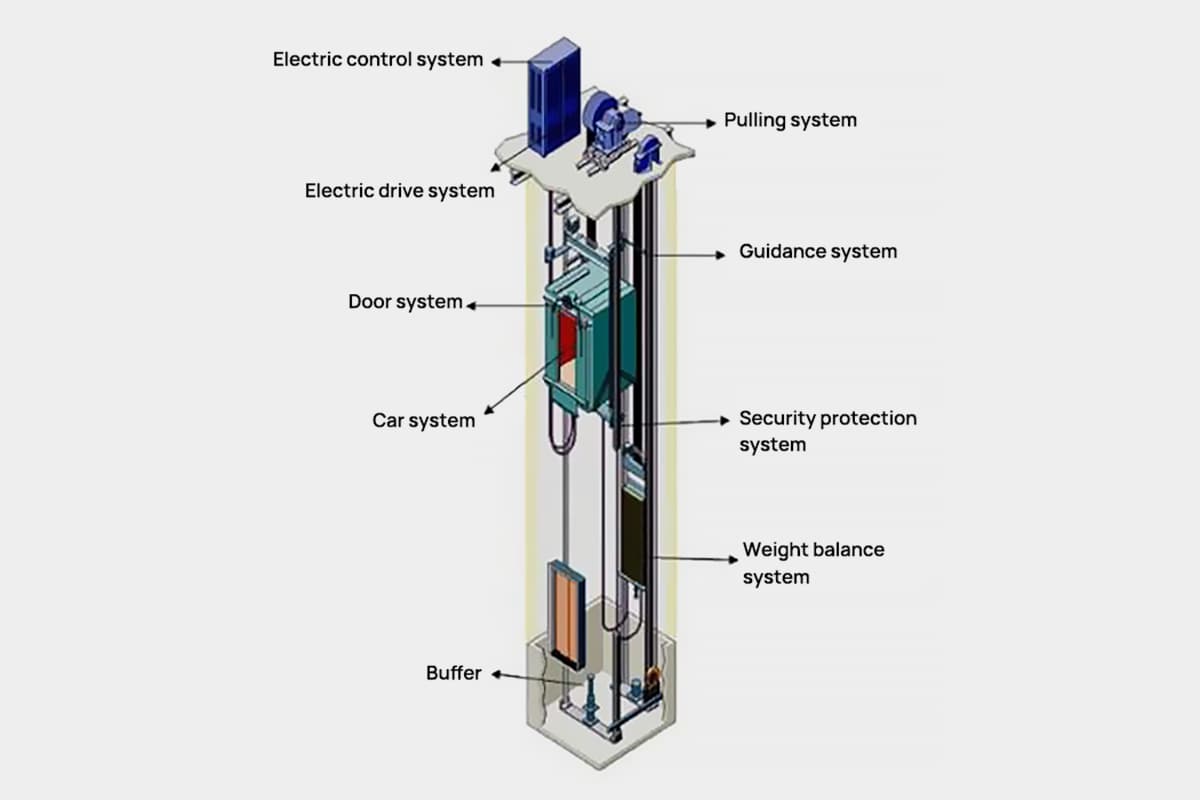
Have you ever wondered what keeps you safe and moving smoothly inside an elevator? In this article, we delve into the intricate structure and operating principles of elevators, exploring their…
What makes materials like POM, PTFE, and Nylon vital for non-standard machinery? This article explores eight commonly used non-metallic materials that are indispensable in various mechanical applications. From the wear…
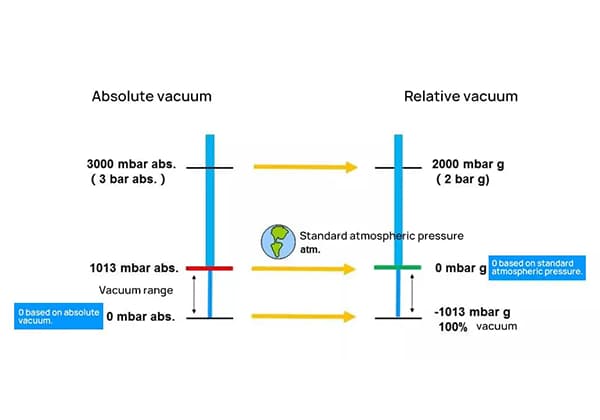
Looking for top vacuum pump manufacturers? This article highlights the leading brands in the industry for 2024, such as NASH, Edwards, Leybold, and Atlas Copco. Each company is renowned for…
Ever wondered why your machinery bearings heat up, leading to costly downtimes? High bearing temperatures can shorten bearing life and spike maintenance expenses. This article dives into common causes, like…
Imagine a world where machines not only build our products but also think and learn like us. In this article, we explore how artificial intelligence is transforming the manufacturing industry.…